 stefan.schnitzer
stefan.schnitzerFor the start, I sketched up a curse schematic of the code, electronics, and power distribution the board needs:
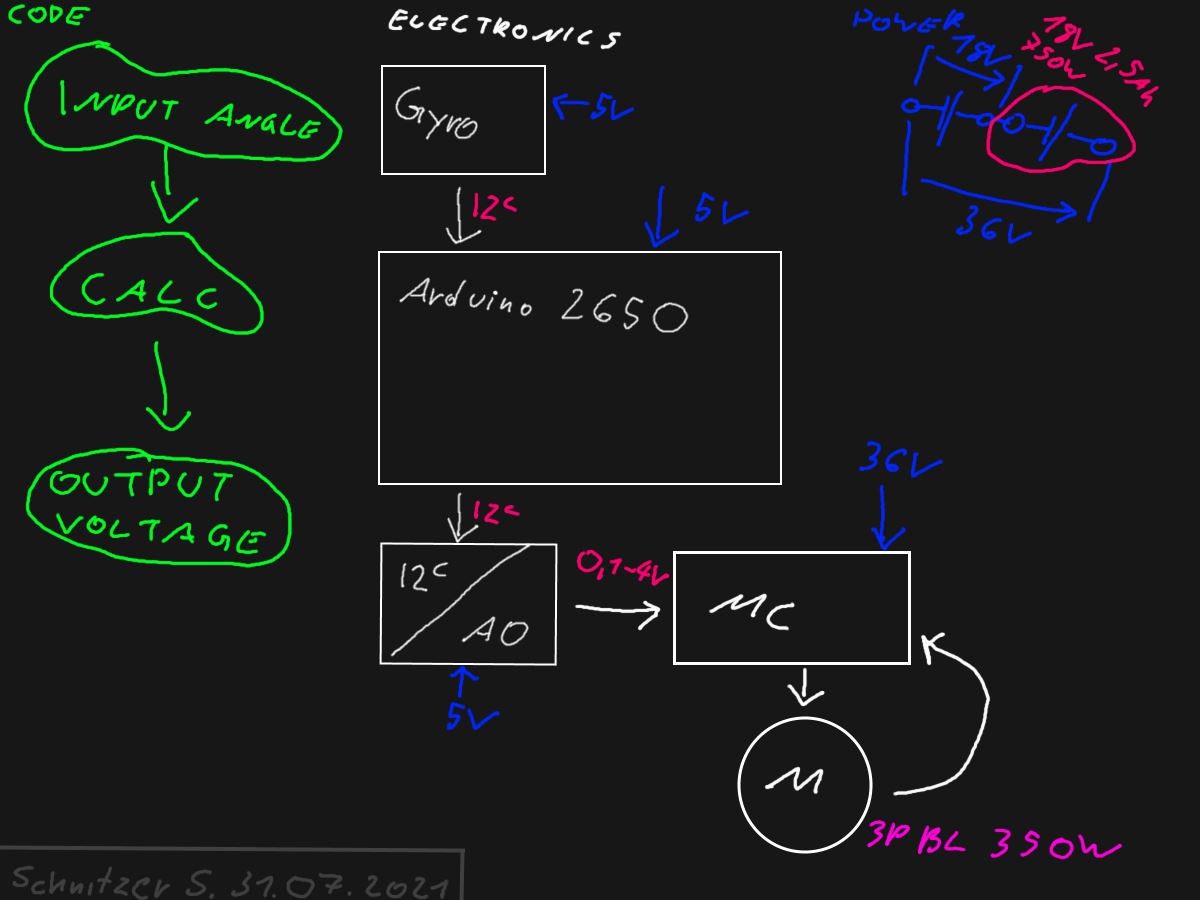
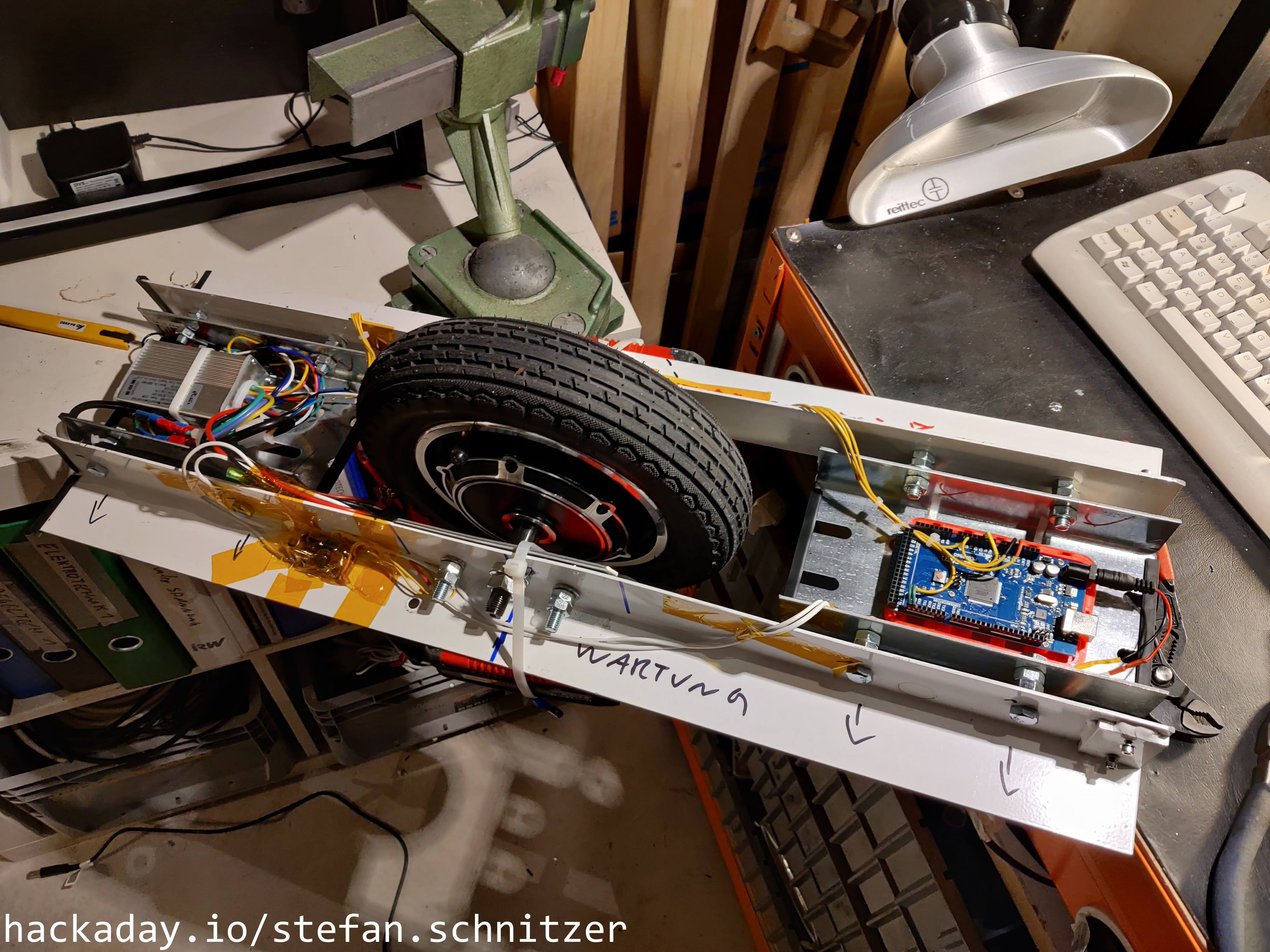
The Idea is that a gyro will input the current angle of the board to an Arduino mega. The Arduino will then calc an appropriate control voltage for the motor controller. However, with the motor controller, I selected it will not be possible to make it completely self-balancing. I try to keep it simple: "lean forward" -> "increase control voltage" //"lean forward to much" -> "stop motor" ?
BOM:
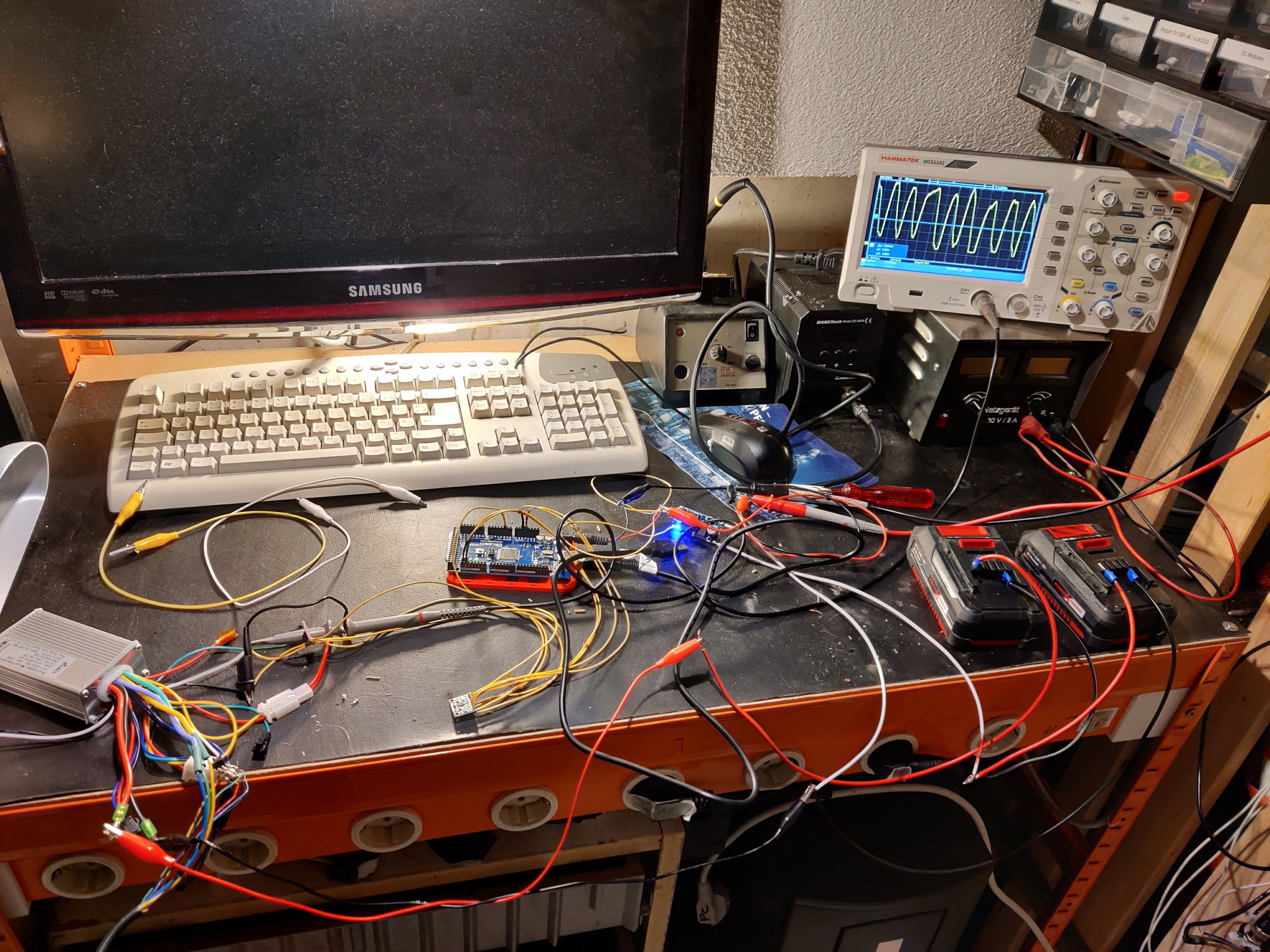
Gyro: GY-521 MPU6050
Arduino: Mega 2650
DAC: MCP4725 12Bit I2C
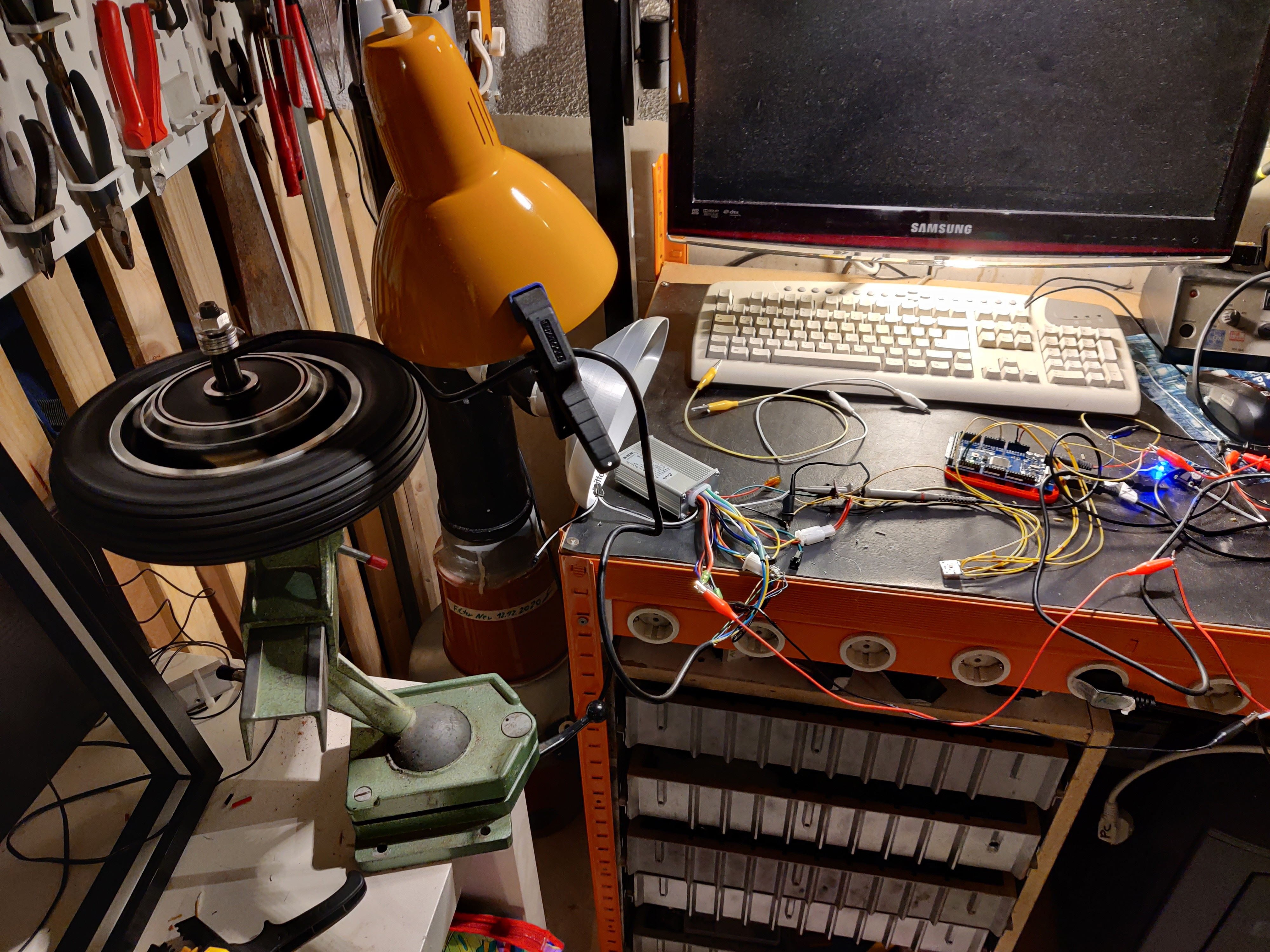
MC: Generic Brushless Controller 36V / 48V 350W
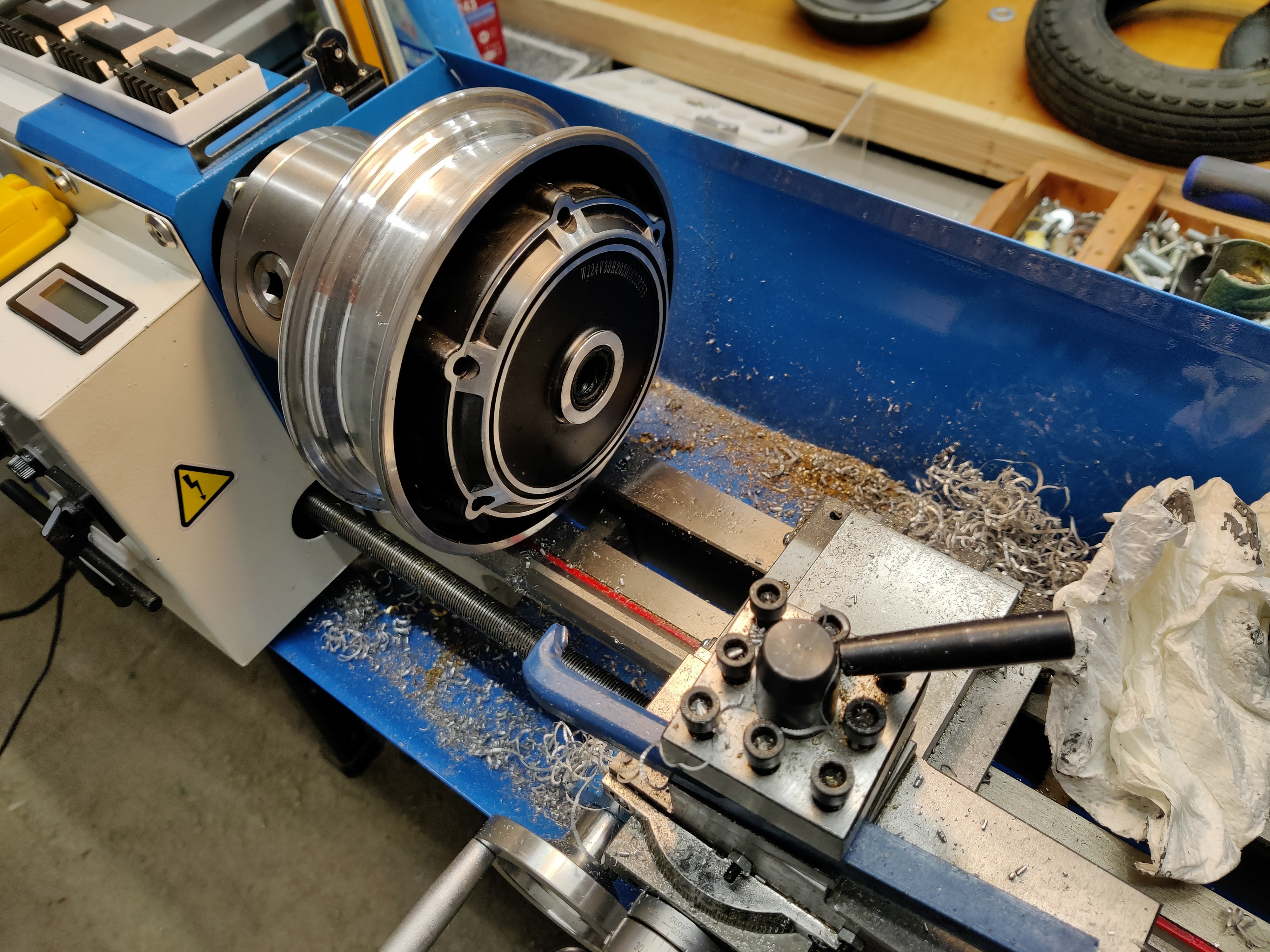
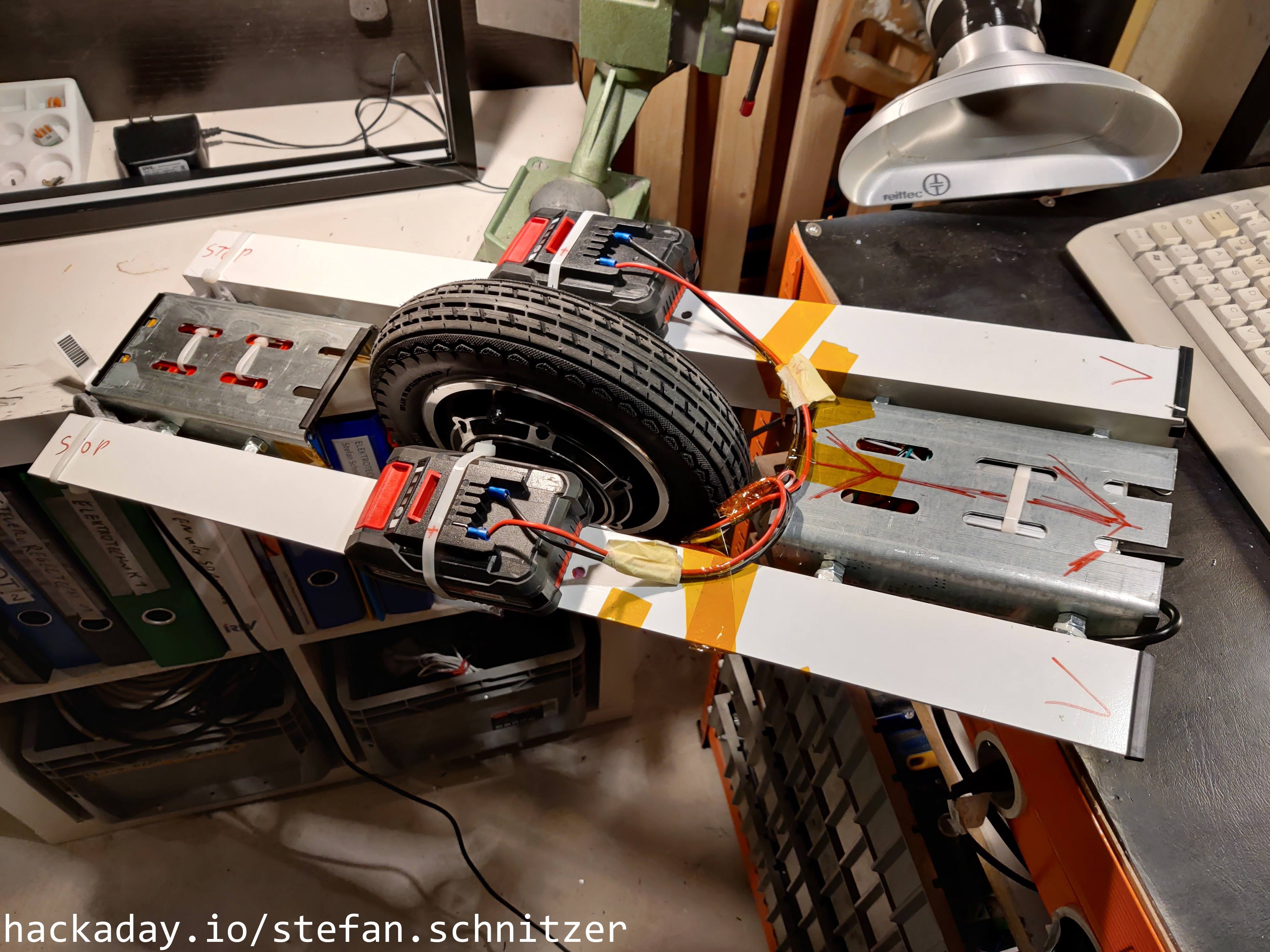
Motor: Keenso 10-Zoll-Radnabenmotor
Batterie: Li-Ion, 18 V, 2x 2,5 Ah
I already think this ding will be extremely difficult to ride for me. (I am not exactly a sporty person. Like a surfer or snowboarder)










 Krockwell
Krockwell
 shlonkin
shlonkin
 A.M. Smith
A.M. Smith
 Scott Duckworth
Scott Duckworth
Pretty cool. I like it.