 Ghani Lawal
Ghani LawalCompleted surface level investigation into dynamic response of the motors.
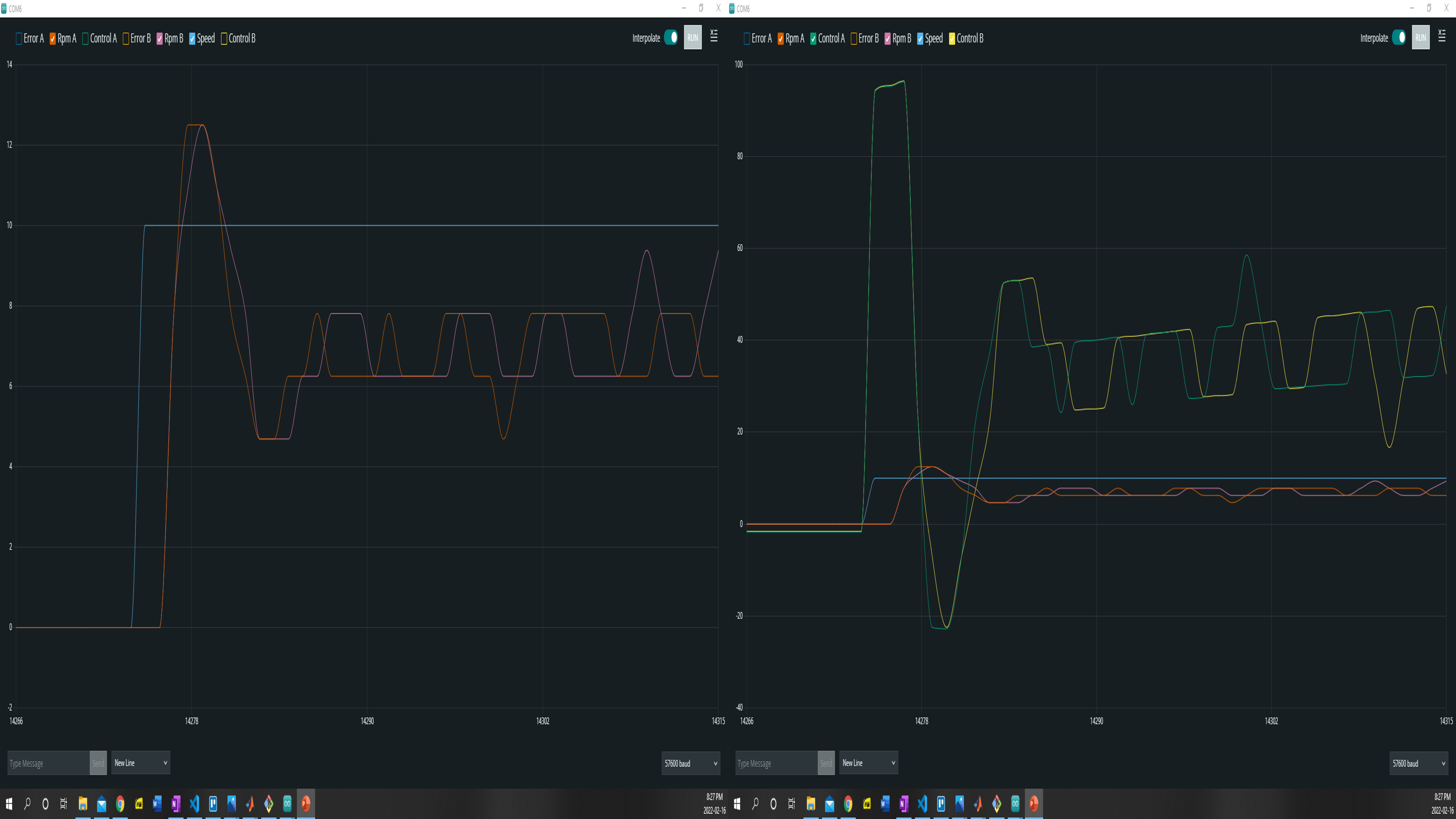
For step response to speeds up to 100 the system appears underdamped. Motor A consistently settles to within 90% of its final value quicker than Motor B. Motor A usually has a settling time of less than 0.4 seconds. Motor B usually has a settling time of within 0.8 seconds, thought it can deviate from the desired value 100-300 ms latter, but is definitely is settled within 1.5 seconds of the step input
For step responses to speeds from 110-130 rpm the system appears critically damped. Motor A settles to within 90% of its final value within 0.24 seconds. Motor B settles to within 90% of its final value within 0.26 seconds.
When stepping down by more than 15 rpm from any speed the system appears underdamped. Stepping down by less than 10 rpm system appears critically damped.
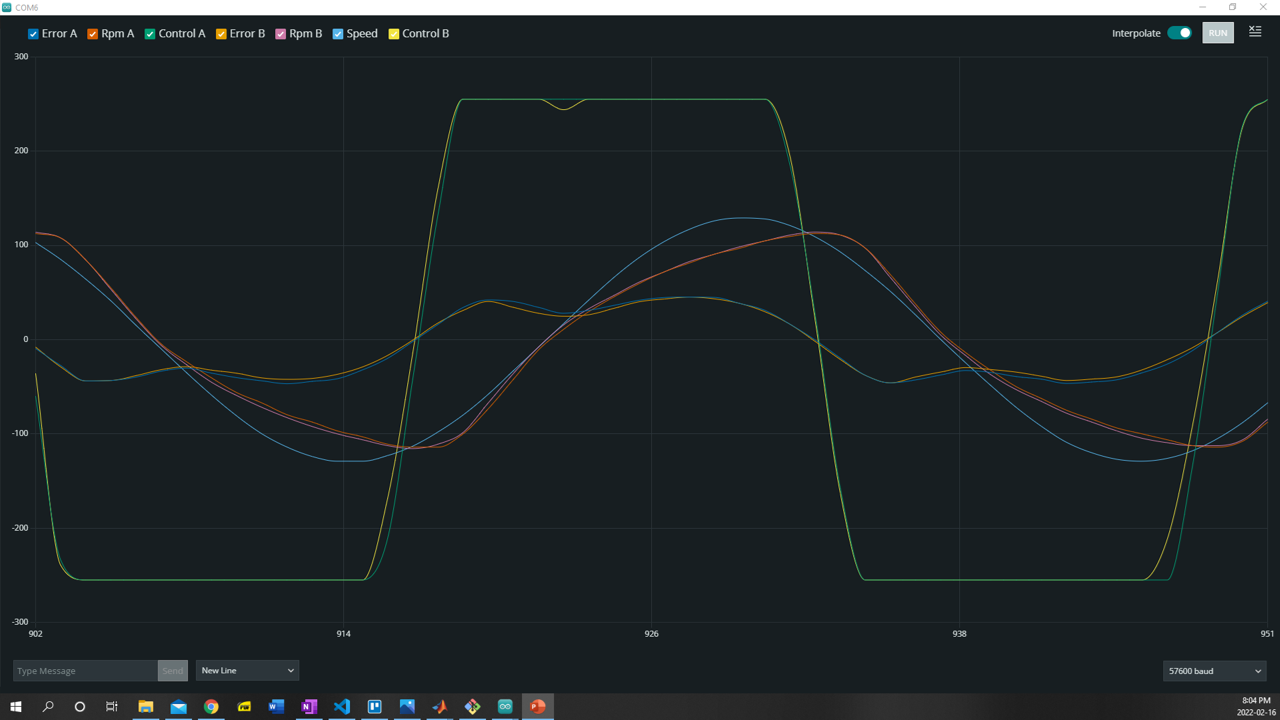
Kp= 8.5, Ki = 5, Kd = 0.02; SampleTime = 20 milliseconds. Saved plots for ramp, step and sinusoidal responses




Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.