 Ghani Lawal
Ghani LawalFeatures
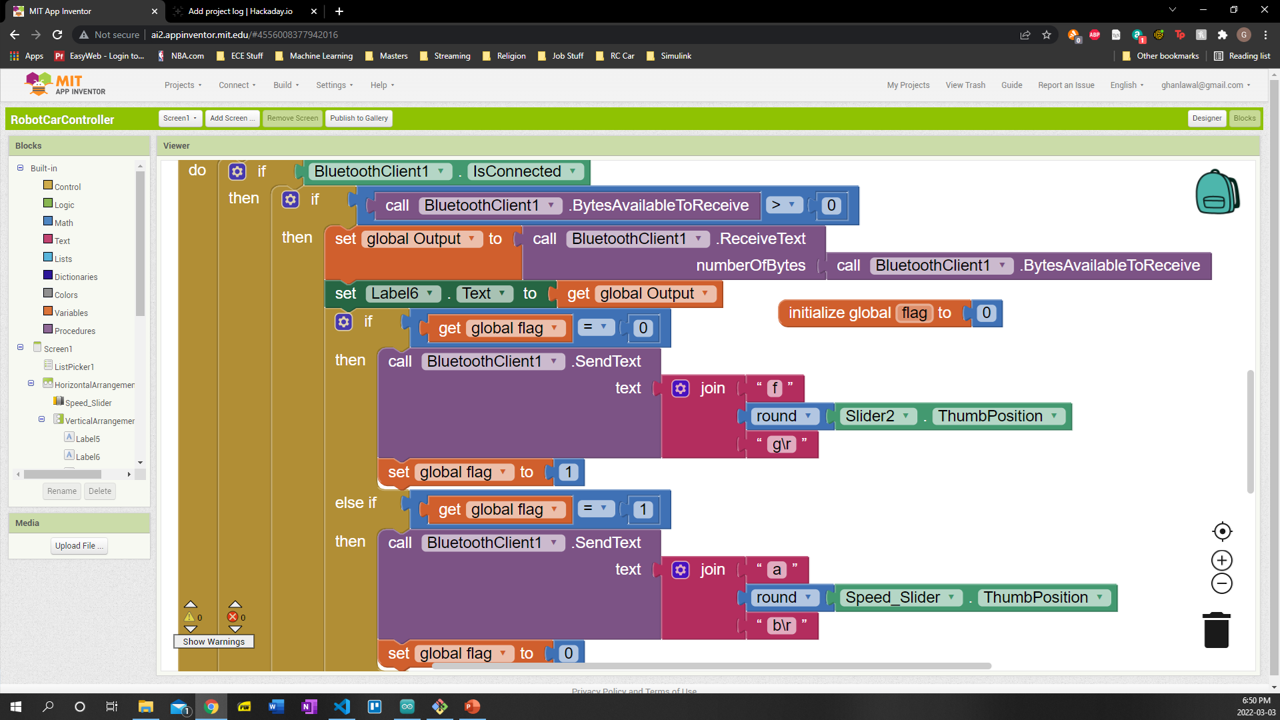
· Hardware switch to change speed command source from associated phone app and pc with indicator lights
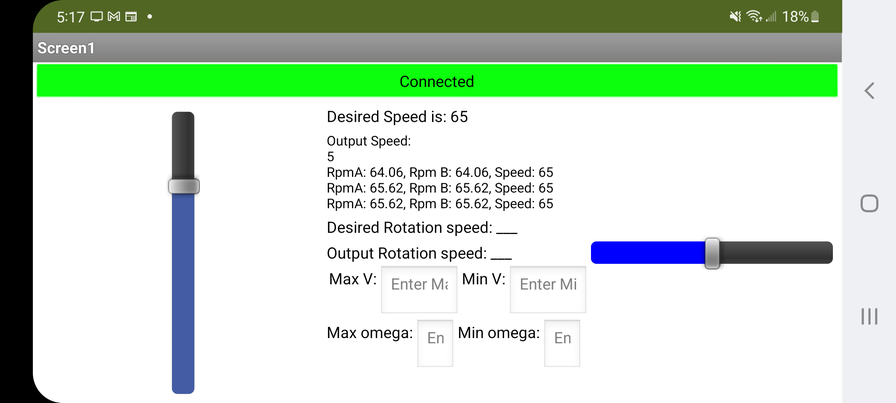
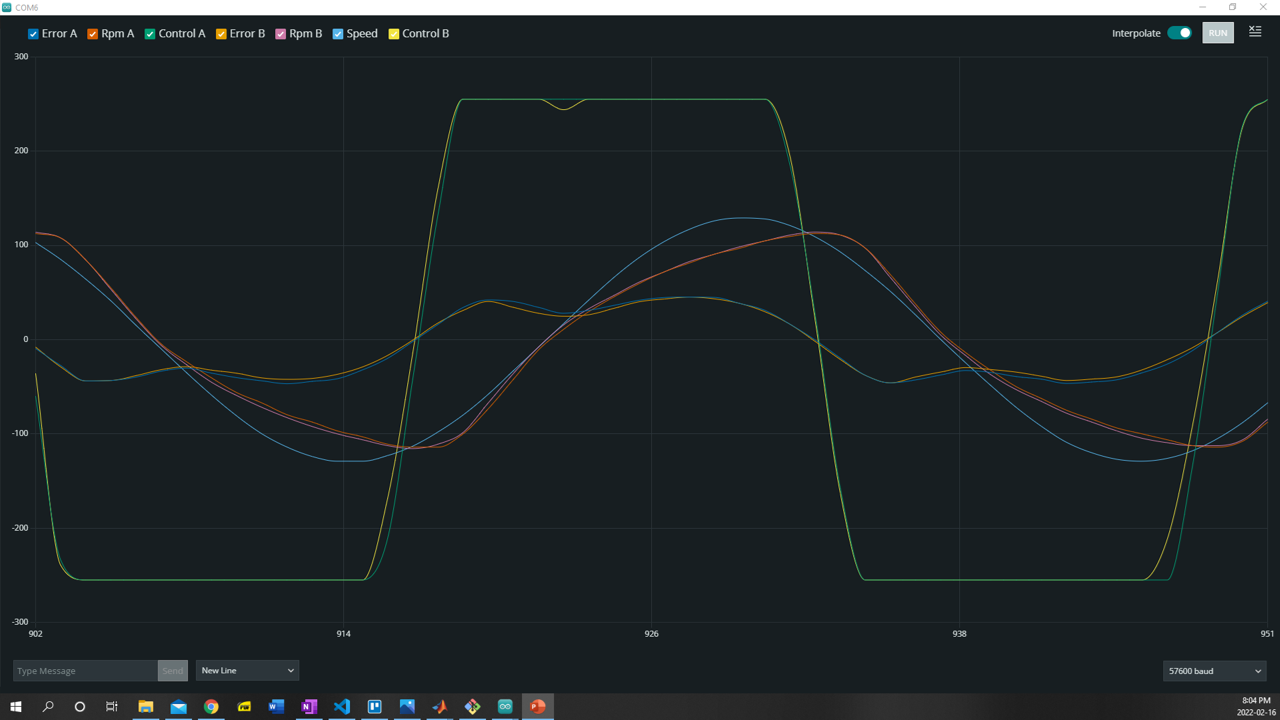
· Maximum linear speed set to 130 rpm, given wheel radius that is 44.24 cm/s
· Maximum rotation speed set to 200 deg/s
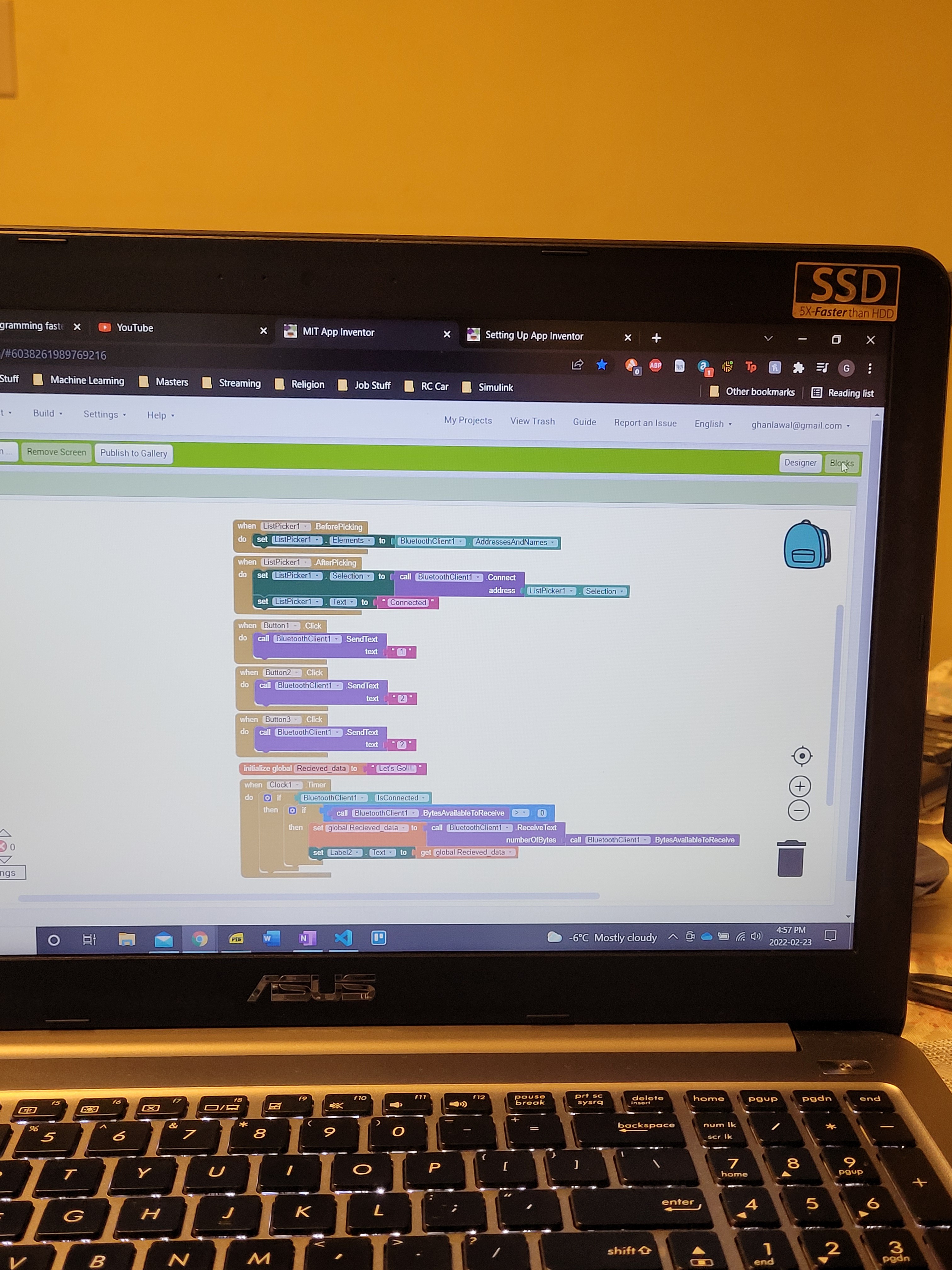
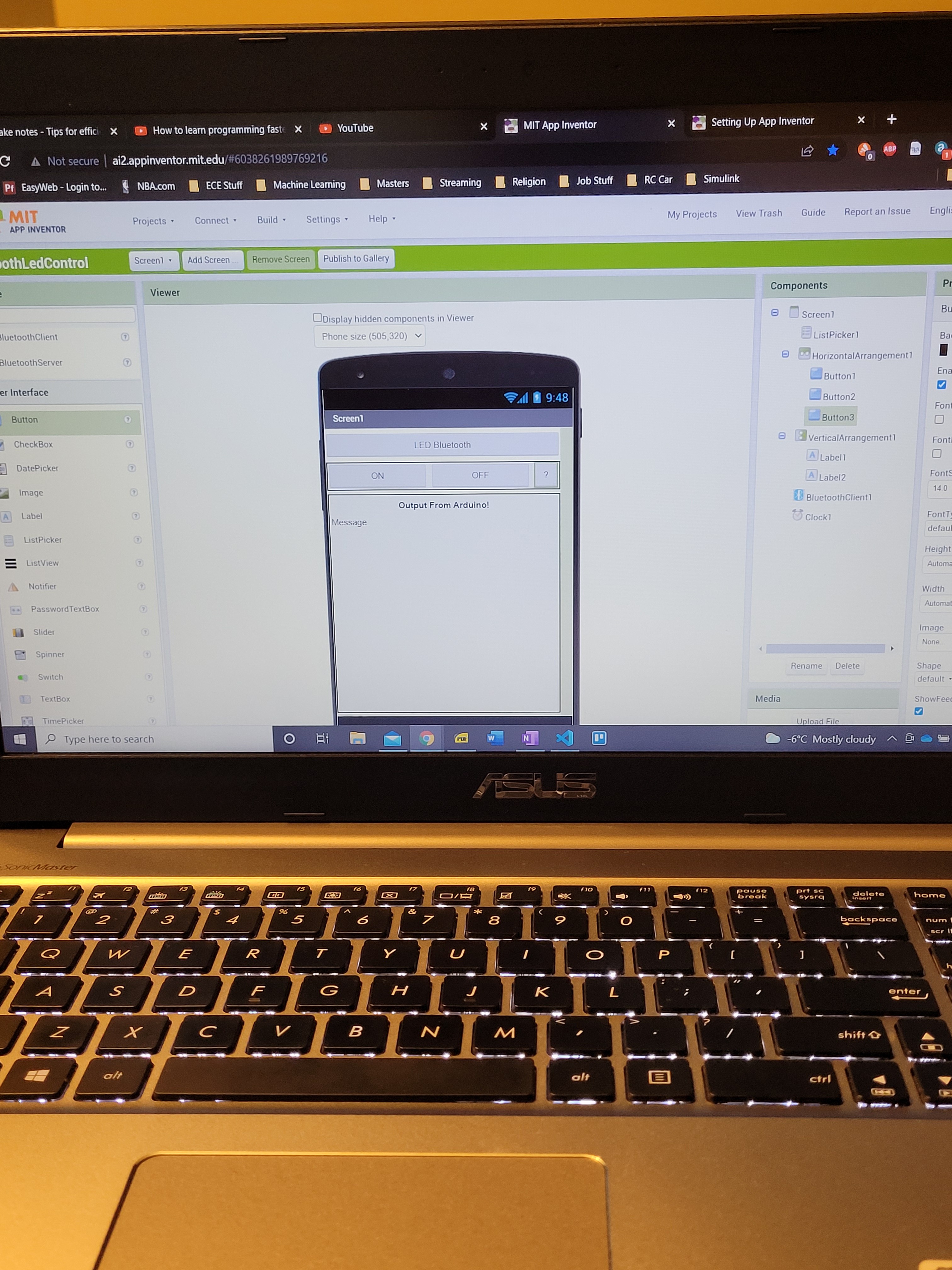
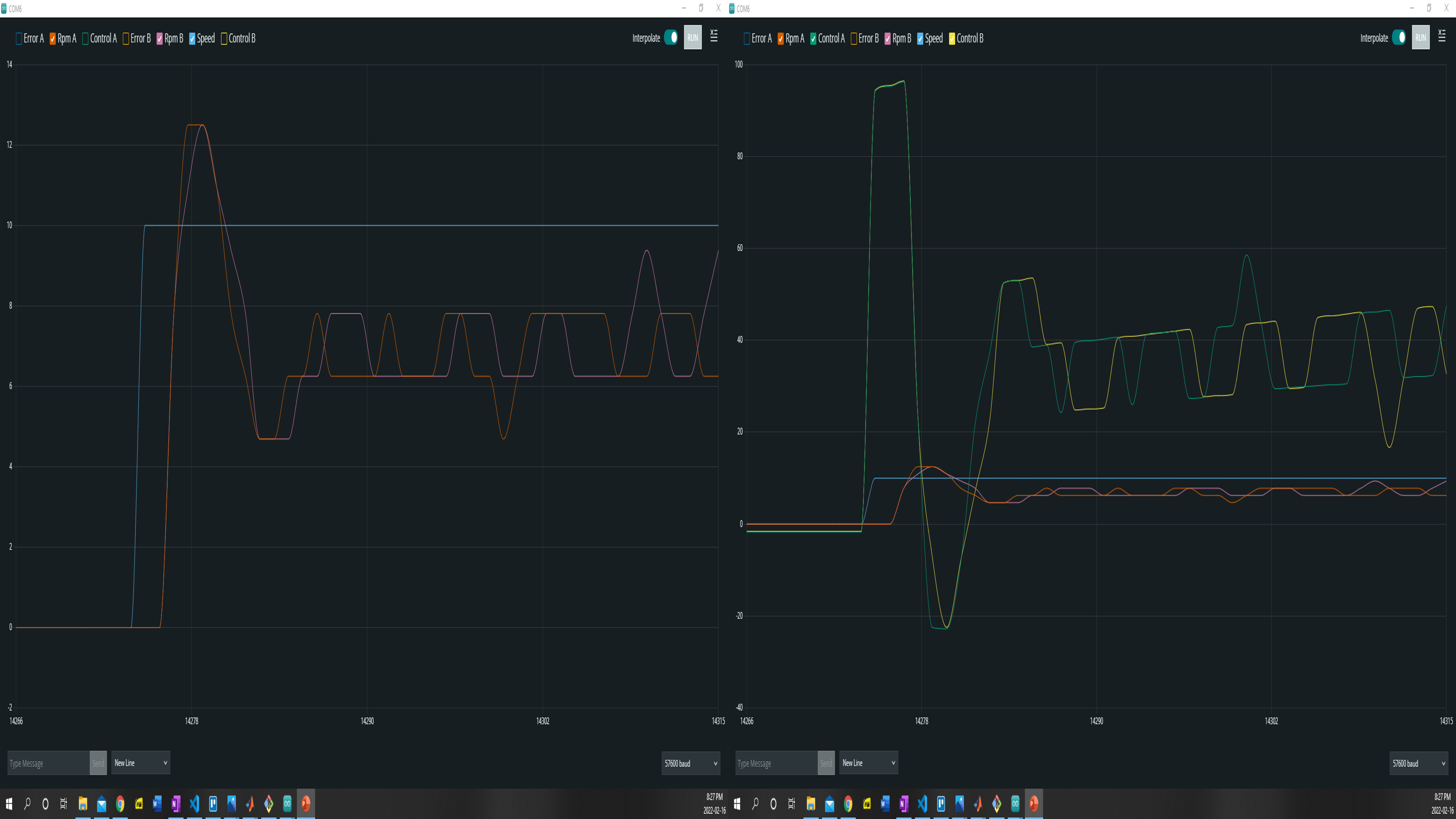
· Can see actual linear and angular velocity of the robot on the app
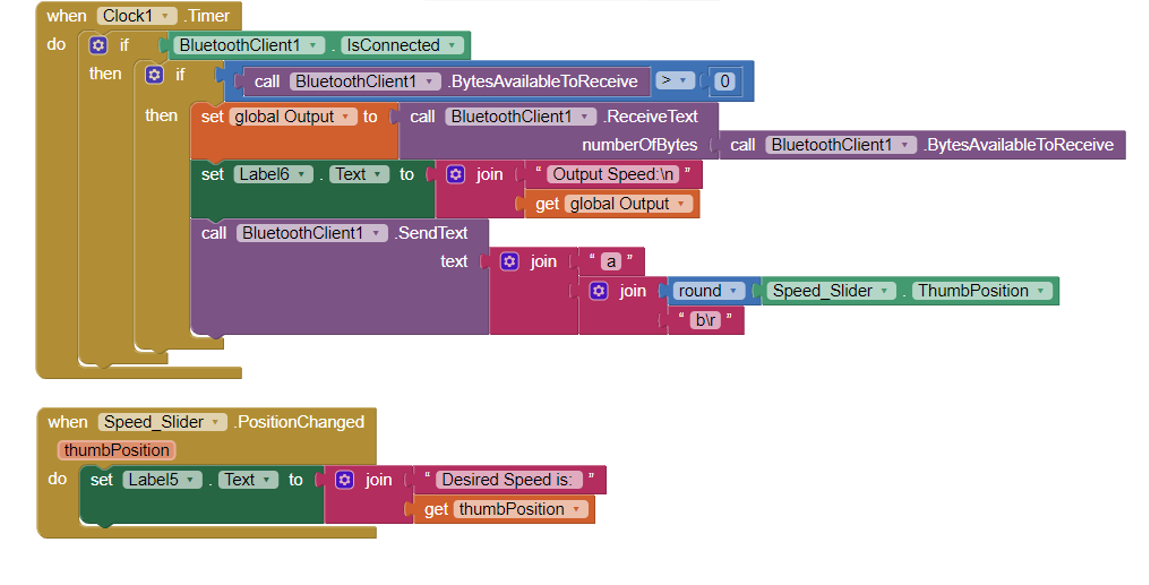
· App sends velocity commands with start and stop bits so that erroneous commands are ignored







 Artur Majtczak
Artur Majtczak
 Nicholas
Nicholas

 Danny FR
Danny FR