 Andy
AndyPrinted parts:
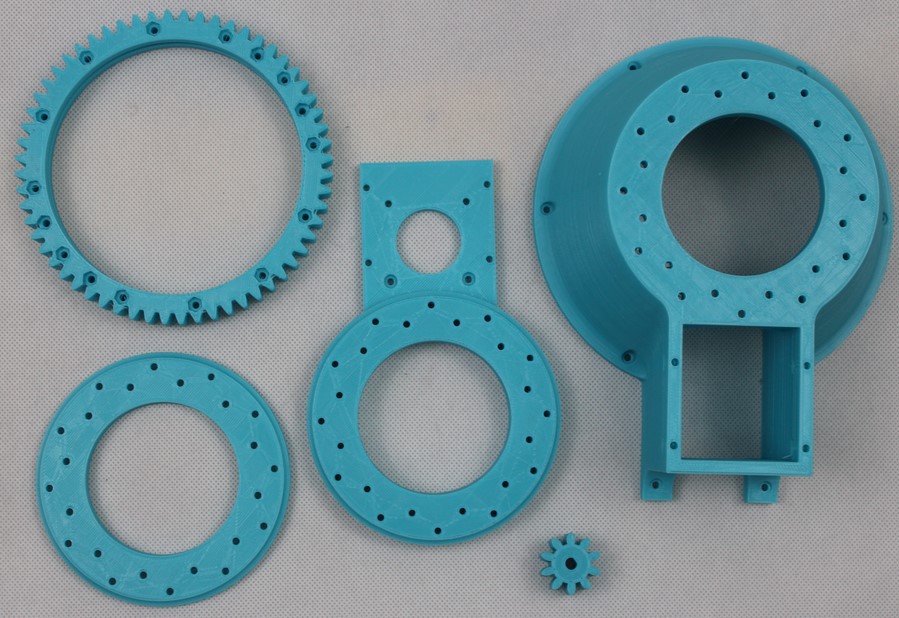
other parts:
| parts | quantity |
| M3X30 | 6(at least) |
| M3X8 | 4 |
| M3X14 | 4 |
| NEMA stepper | 1 |
| M3 nuts | a few |
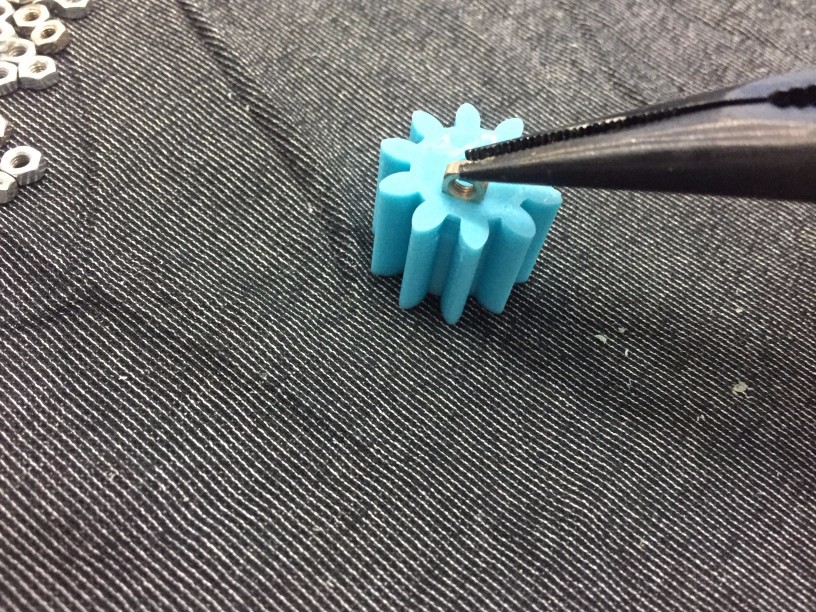
Insert a nut to BASE_motor_input_gear:

put the motor gear to the stepper.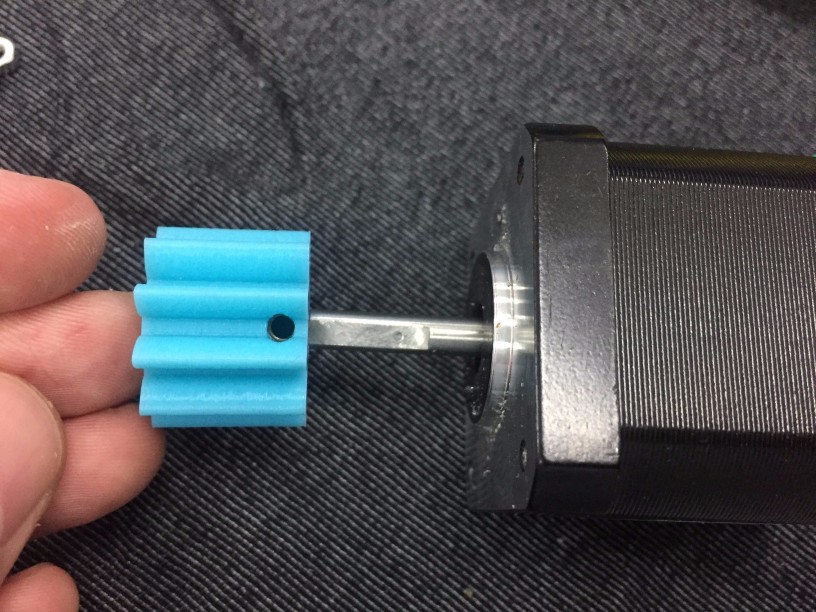 The hole is too tight, so I'm using a vise to push the gear to the motor.
The hole is too tight, so I'm using a vise to push the gear to the motor.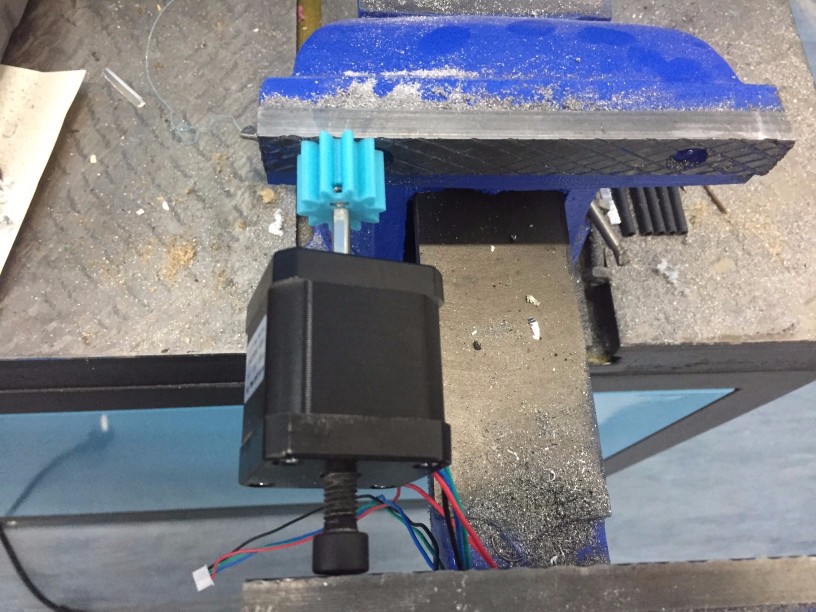 M3X3mm set screw to secure the gear.
M3X3mm set screw to secure the gear. 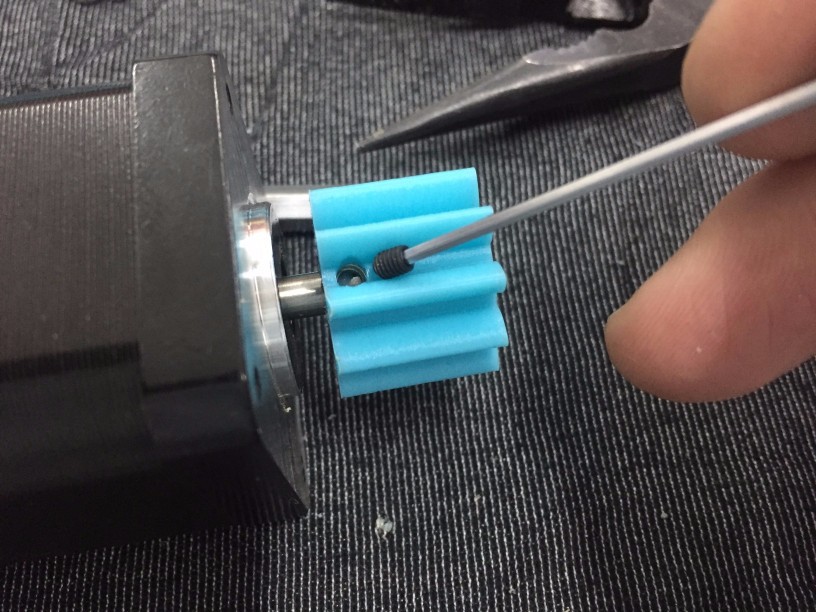 4 M3X8 screws to mount the stepper.
4 M3X8 screws to mount the stepper.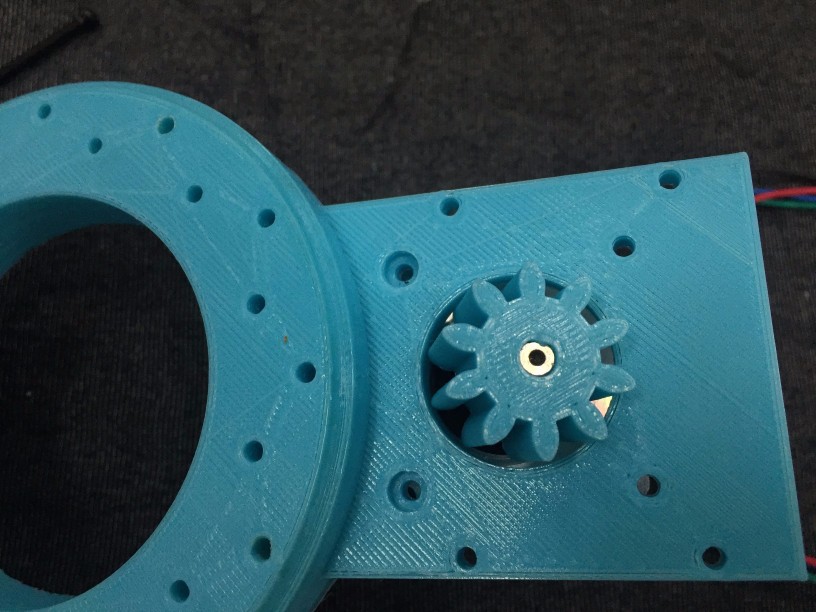 apply 5mm ball to the slew bearing parts.
apply 5mm ball to the slew bearing parts. Don't put too many balls here. Little gap will be fine.
Don't put too many balls here. Little gap will be fine. A little grease (lubricant) will be great.
A little grease (lubricant) will be great.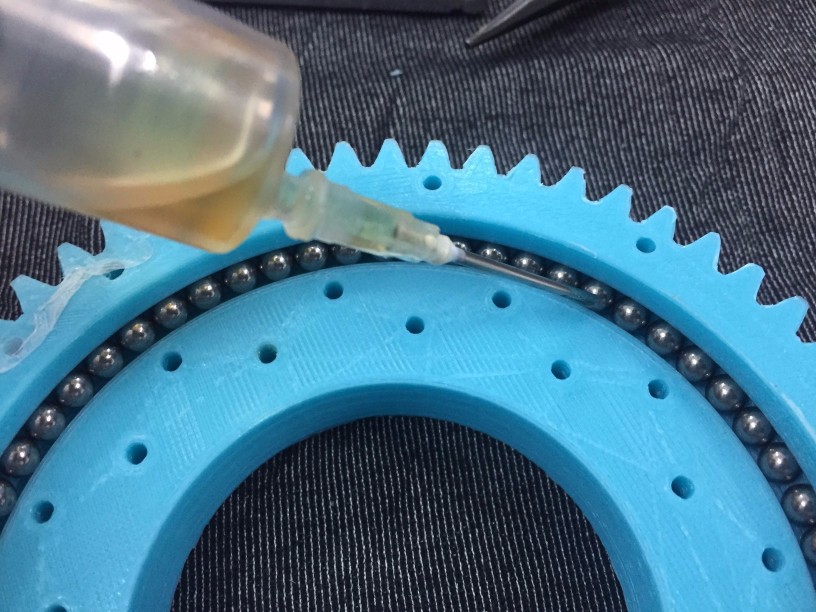 Put those parts together.
Put those parts together.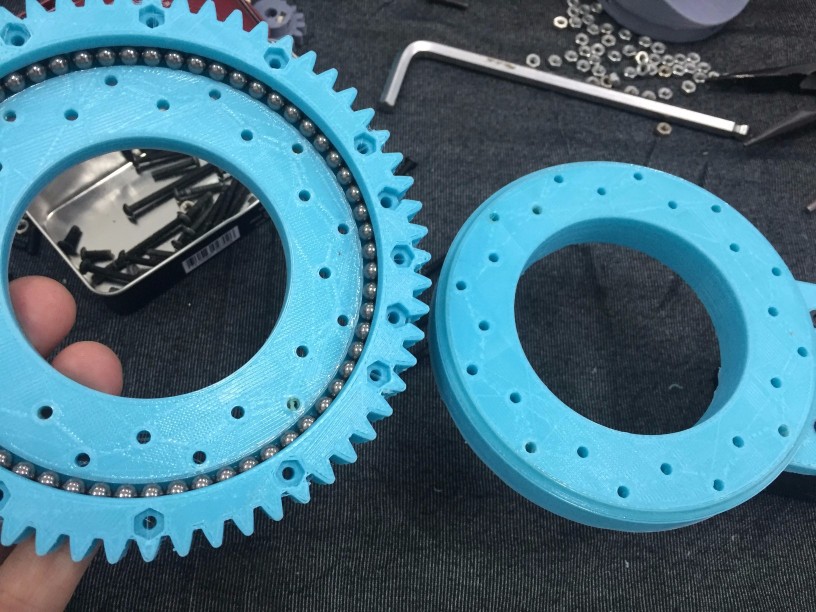 put 2 of M3X30 screws in there but don't go too much, we need another part.
put 2 of M3X30 screws in there but don't go too much, we need another part. Put 12 nuts in the outer nut-holes.
Put 12 nuts in the outer nut-holes.  Put those parts together.
Put those parts together.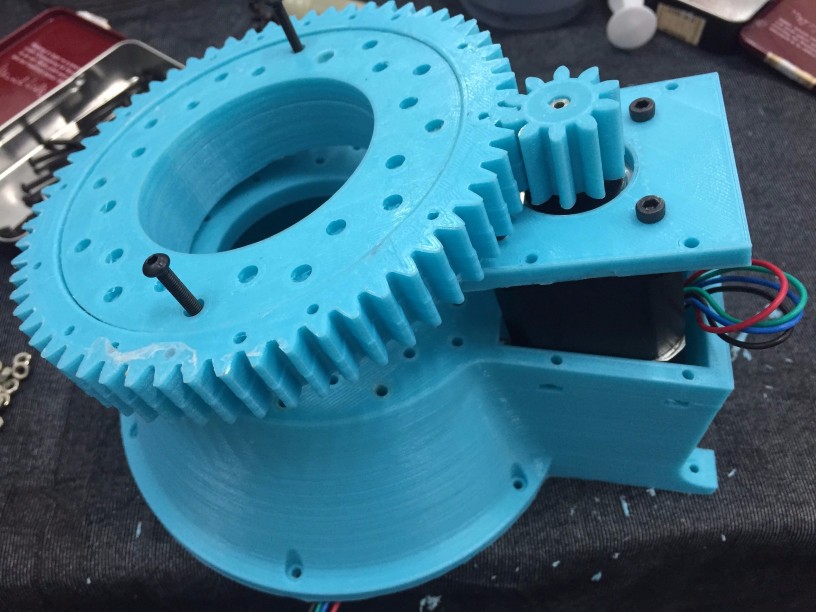 fasten the screws, done.
fasten the screws, done.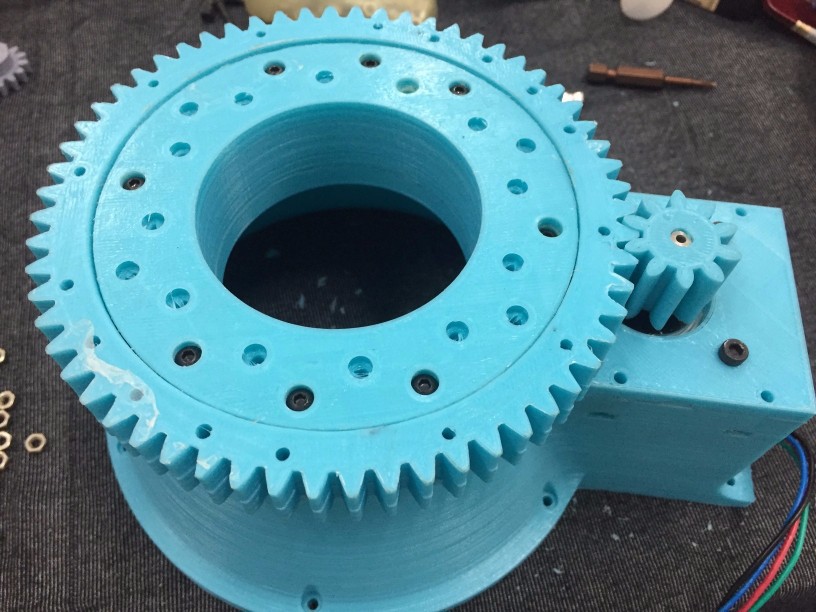
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.