 kelvinA
kelvinA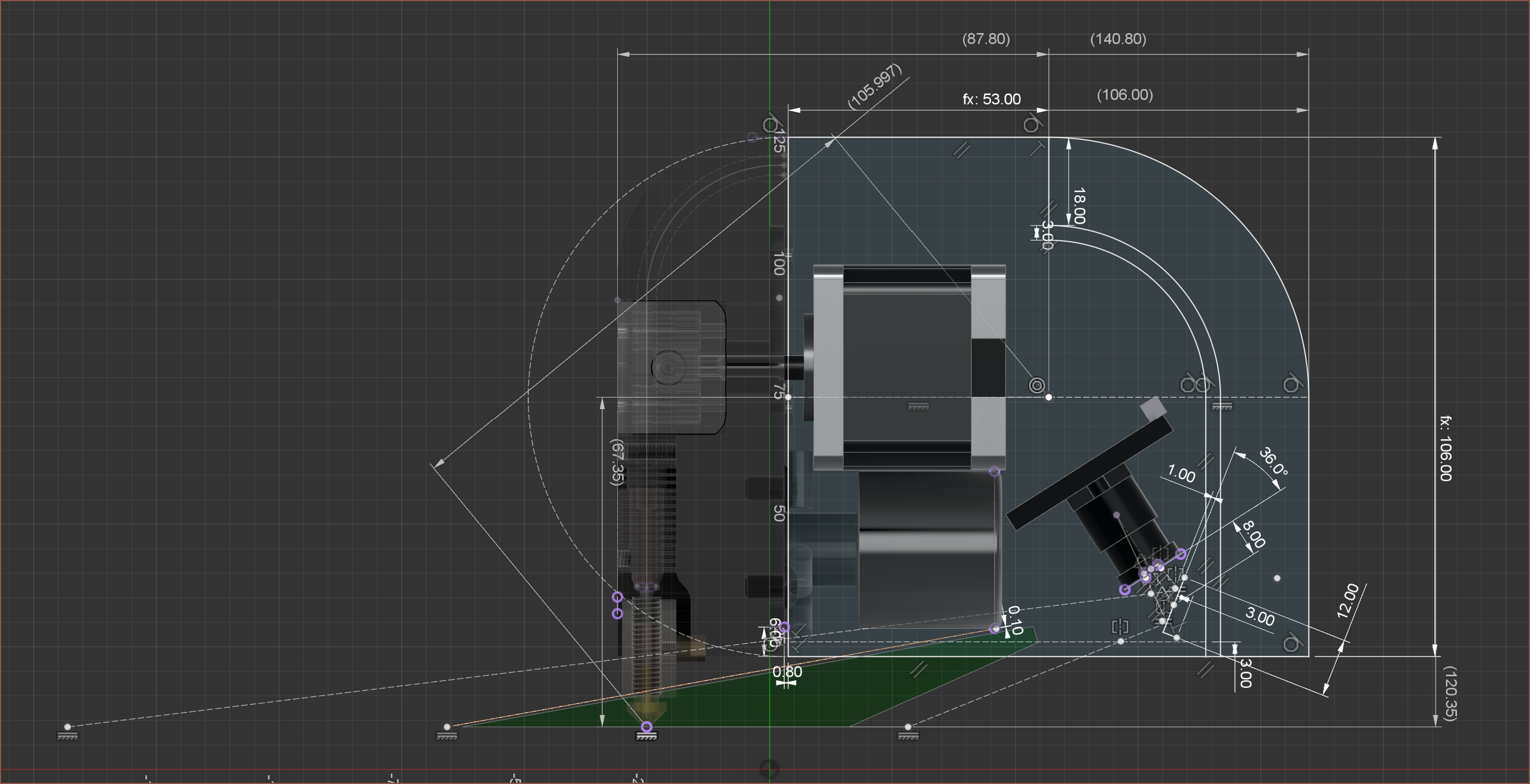 I'm still annoyed about how much the OV4689 PCB costs (£48) over a OV4689 module (£18) but my research into finding something that could accept a 4 line MIPI and encode it resulted in a solution fail. If I recall correctly, I did some calculations months ago with 2 lane MIPI estimates and would be able to acheive the framerates advertised on the PCB, and the H616 on the Orange Pi Zero 2 was the only SBC I could find that was cheap and had a 1080P@60fps encoder. Conviniently enough, this is the board I plan to run Klipper on anyway (unless the yet-to-be-released Biqu CB1 comes in at like £25 or something because the Zero2 is around that price and the CB1 would be a much nicer solution with the MANTA M8P), so theoretically I could go down that route, but for now I probably should stay in my lane.
I'm still annoyed about how much the OV4689 PCB costs (£48) over a OV4689 module (£18) but my research into finding something that could accept a 4 line MIPI and encode it resulted in a solution fail. If I recall correctly, I did some calculations months ago with 2 lane MIPI estimates and would be able to acheive the framerates advertised on the PCB, and the H616 on the Orange Pi Zero 2 was the only SBC I could find that was cheap and had a 1080P@60fps encoder. Conviniently enough, this is the board I plan to run Klipper on anyway (unless the yet-to-be-released Biqu CB1 comes in at like £25 or something because the Zero2 is around that price and the CB1 would be a much nicer solution with the MANTA M8P), so theoretically I could go down that route, but for now I probably should stay in my lane.*Goes to Twitter to get link for CB1*

Achem. Anyway, so when I redesigned the Slight, the camera pcb was sticking out. Preferrably, I want the Slime fully enclosed so that I can pump cool air to components, like what Nasa has done (pg 10). I originally thought that I would use a mirror, but back when the Slime was a lot longer (just under 200mm compared to 106 now), I could just put the camera facing the nozzle without one.
It should be easier to move the mirror than the entire camera assembly. Also, as mentioned in the comment section of the previous log, I found a video on reducers, and I've decided on moving any motor reducer features to the arm holding the Slime (though, it looks more like a Snail now). If I assume that, if half of the SecSavr Spindle's weight is attached, the total mass of the Spindle, extruder motor and magnet is 1kg and the centre of mass is 5.3cm away from the pivot, I require 51.94Ncm of torque. Wait... is that right? Seems kind of low. I guess that's why my reduction was only 3.75:1 before. That simplifies things. I was thinking I was going to use the capstan drive [below], but a simple belt pulley should be enough. I can use some thick belt to mitigate elasticity in the joint.
I must be missing something though, because I found this listing for a 5 axis attachment and they've got higher reductions than 3:1 on motors that are likely at least 126Ncm.
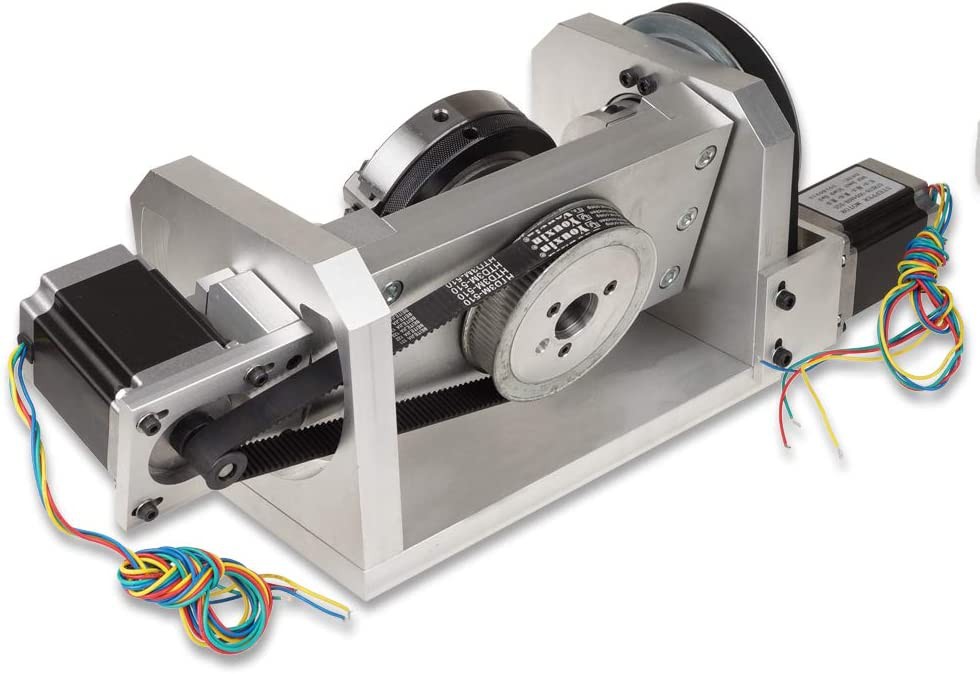
 The 5th axis is likely what I'd need, and it's probably so that steps aren't skipped due to milling forces, especially when the stepper is rotating. Assuming that the motors are 76mm Nema 23's with 1.9Nm (190Ncm) of torque, I'd need a 28.5:1 reduction with a 40Ncm Nema 17 to get equivalent torque.
The 5th axis is likely what I'd need, and it's probably so that steps aren't skipped due to milling forces, especially when the stepper is rotating. Assuming that the motors are 76mm Nema 23's with 1.9Nm (190Ncm) of torque, I'd need a 28.5:1 reduction with a 40Ncm Nema 17 to get equivalent torque.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.