 JP Gleyzes
JP GleyzesAlthough the current system worked fine, I discovered that the Azimut axis was a little "weak"
- the worm gear has a limited accuracy : 1472 rotations for 180° of azimut motion
- the worm gear has a limited torque
Consequently it occured that in windy conditions the stepper motor stalled and thus missed pointing to the sun.
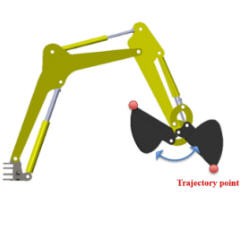
So I decided to try another design directly inspired from excavators where the bucket can rotate 180° with a linear actuator.
The reason why I went to this design is simply because I wanted to follow the sun all day long. Even in june when the Azimut rotation spans from 60° to 300°... That is 240° of azimut motion. A directly mounted linear actuator would allow only 150° of motion which would be far under my expectations...
And, of course, like a worm gear, I still wanted a leadscrew to allow to keep the position when the motor is idle.
Cinematics
I made my own "bucket" and here is the principle of cinematics:
This drawing explains a little more how this cinematics works:
- yellow: linear actuator
- red: two arms
- green: a crank attached to the bottom plate
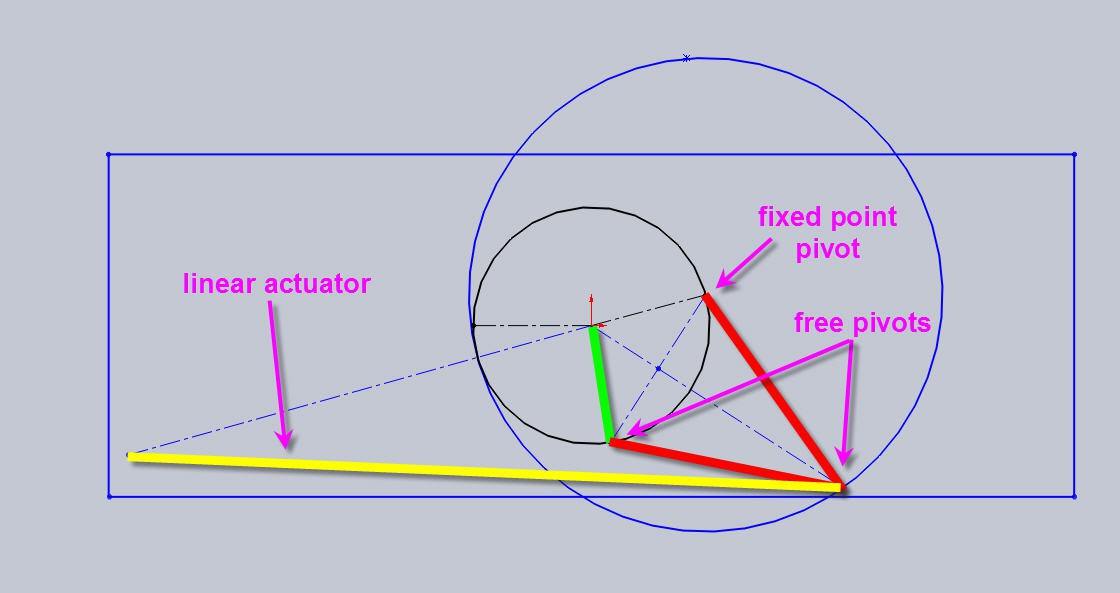
We can clearly see that more than 180° of Azimut rotation are accessible (theoretically). But we have to see what will be the "safe" range where torque on the crank will be enough to rotate the solar panel...
Building this cinematics
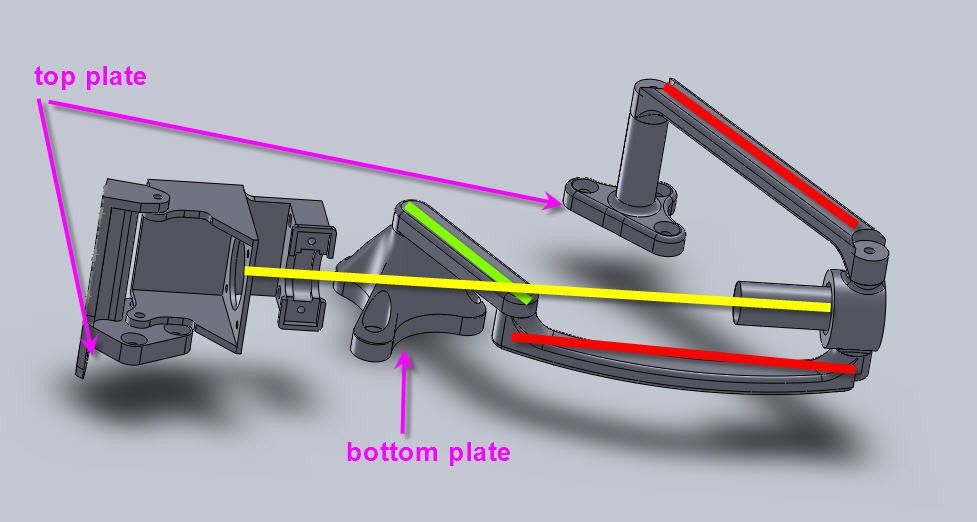
Once again I decided to build this new mechanics mostly with 3d printed parts (and with free plastic bottle PET filament)!
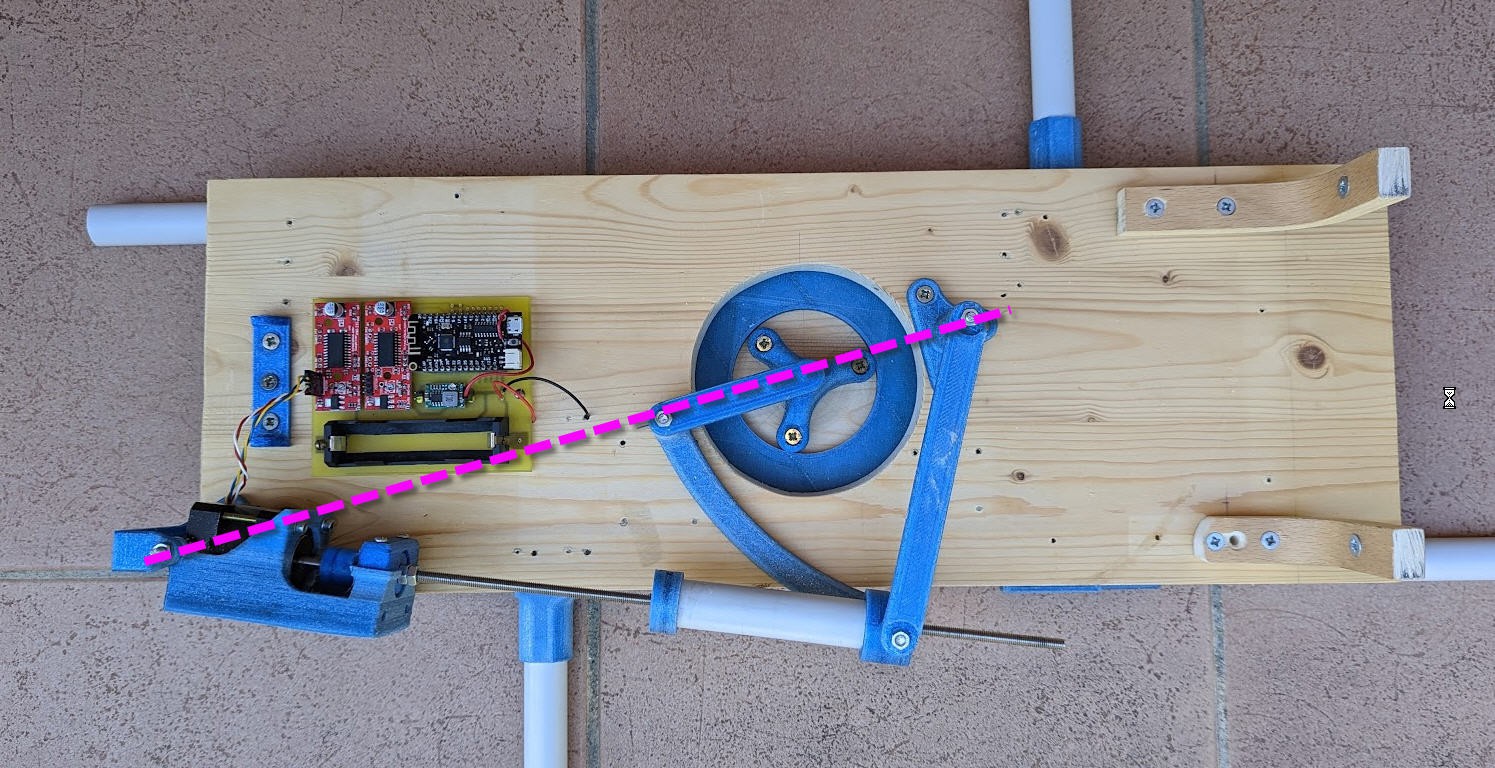
Here is the current design. With the same color legend, you can recognize the moving parts. Added in purple the "Z" information where the top and bottom plates are fixed.
All the stl files needed to this new Azimut mechanincs are available here.
You can also find them into my Thingiverse's pages
Mounting it on the Tracker
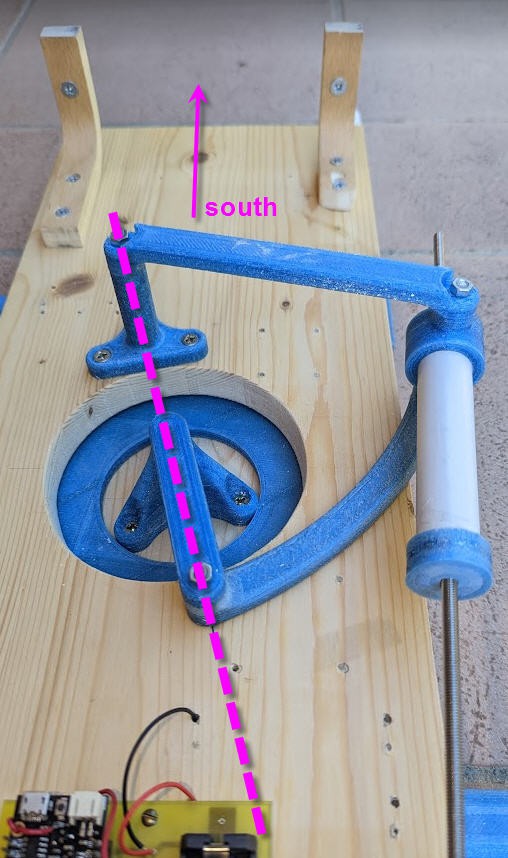
Mounting the parts on the Tracker is quite easy. The only important thing to keep in mind is alignment on the "X" axis.
The crank must be properly centered on the bottom plate. Use the 3D printed gauges to help you find the center. Put a drill bit into this gauge to align this center with the linear actuator axis and the moving arm holder.
Draw this "X" axis line with a pencil and find the center of the moving arm holder, then fix it in place (length of one arm is 130mm and the distance between the lazy Suzan center and the moving arm center is also 130mm).

When this done, align the crank and fix it to the bottom plate. In this position the solar panel should point exactly to the south. We will see later why this is important!
Note that you can safely leave the gauge into the "lazy suzan" it will not rotate as lying on the fixed bottom plate.
Your new Azimut axis is now finished, the leadscrew should rotate freely by hand and should also rotate the top plate.
But how does it rotate ? What are the equations of motion ? This will be explained into the next log !
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.