Bench testing is going okay, but I need a better, and safer way to drive the array of haptic devices. I had some level shifters at my work bench, and they get me going, but they aren't the correct thing for the job. The successfully isolated the current draw, but they do nothing to isolate the motor noise and inductance kick when they stop. Part of the problem is the level shifters I have are bi-directional.
The level shifter looks a bit like this:
Signal in from the left, to the positive on the motor.
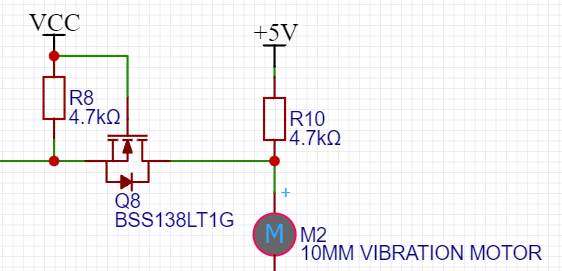
BSS138LT1 - Power MOSFET, 200 mA, 50 V, N-Channel SOT-23 (onsemi.com)
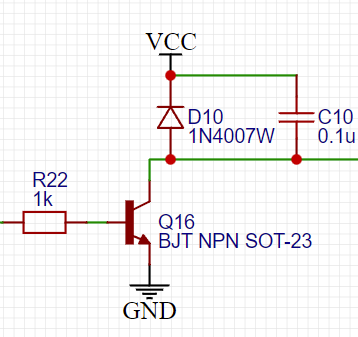
A more traditional motor driver looks like this:
Once again, the signal comes in from the left, but in this case it is sinking the ground from the motor. The motor has constant power, and the ground access passes through a NPN BJT like a 2N2222. Additionally there is a diode for spike management and a capacitor for noise management.
The goal is to drive quite a few, so we can start with 12.
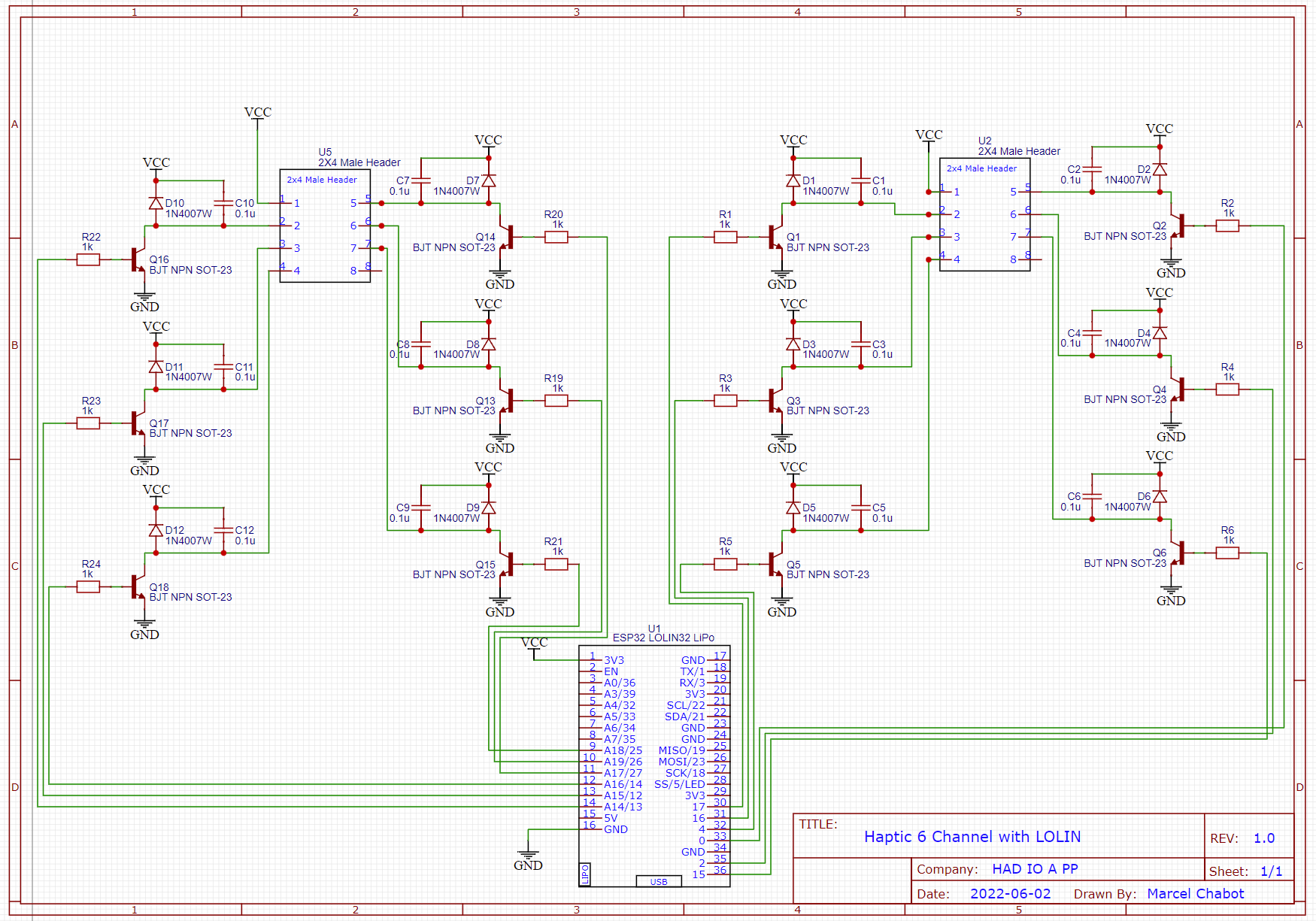
I'm just learning EDA, so I'm sure there are a lot of things a seasoned professional would do differently.
Get everyone out on a PCB all nice and neat and we get something like this:
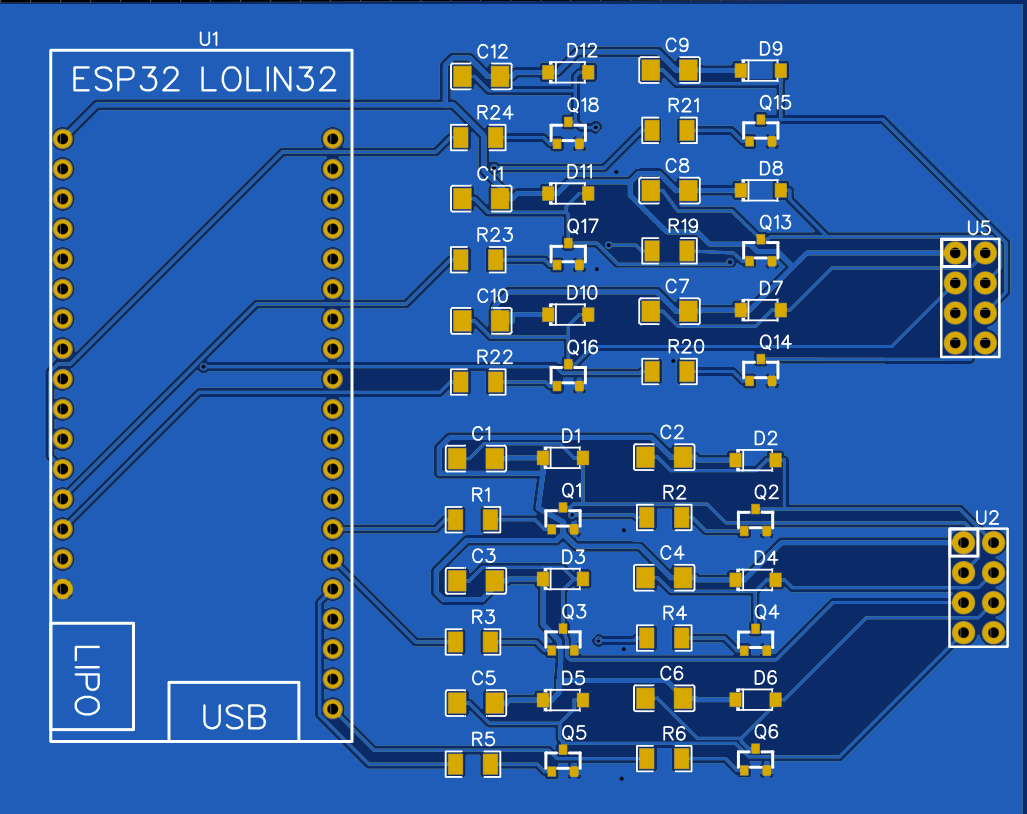
This board should allow us to drive 12 haptics, on 2 banks of 6.
This is draft one, I'm going to think about it for a bit before committing to having it prototyped. I should breadboard out a few of the drivers and double check their performance.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.