 Pavel Surynek
Pavel SurynekDue to some requests I started to publish the files concerning the mechanic construction of RR1. I started the Github repository of the RR1 project where everything will be collected: https://github.com/surynek/RR1.
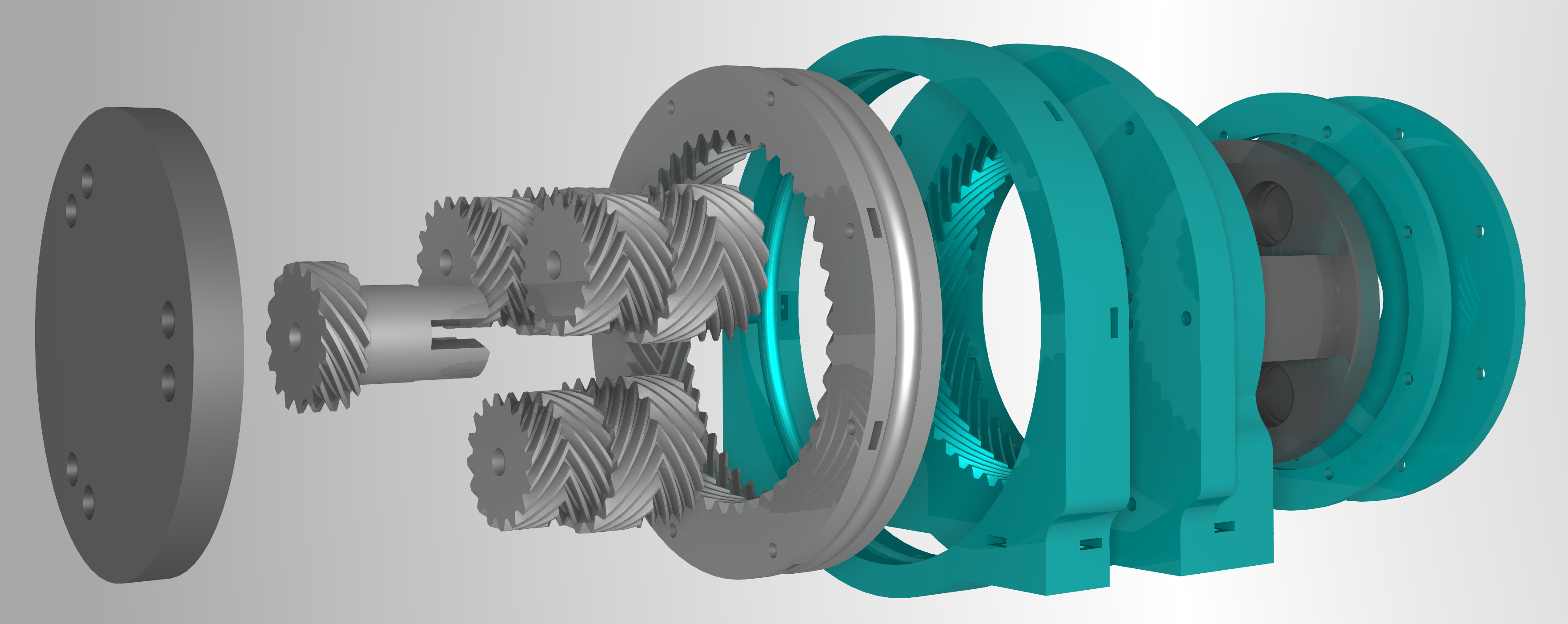
Currently there are the STL files for the planetary gearbox reducer of the main shoulder joint (shown below) for RR1 rev.2 (the one under construction, not the black one from videos). I recommend to use Prusa i3 MKS+ for 3D printing the parts. In addition to this, 7 ball bearings are necessary (16mm outer diameter, 5 mm inner diameter, 6mm height), 3 long bolts for planets (48mm length, 5mm diameter), 1 short bolt for the sun gear (24mm length, 5mm diameter), and 7 small washers (5mm inner diameter), and some 3mm screws, many 3mm square nuts, and very many 6mm bearing balls between the actuator ring and the outer ring. Please note that bolts, screws and bearings are not shown in the figure.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.