 Guillermo Perez Guillen
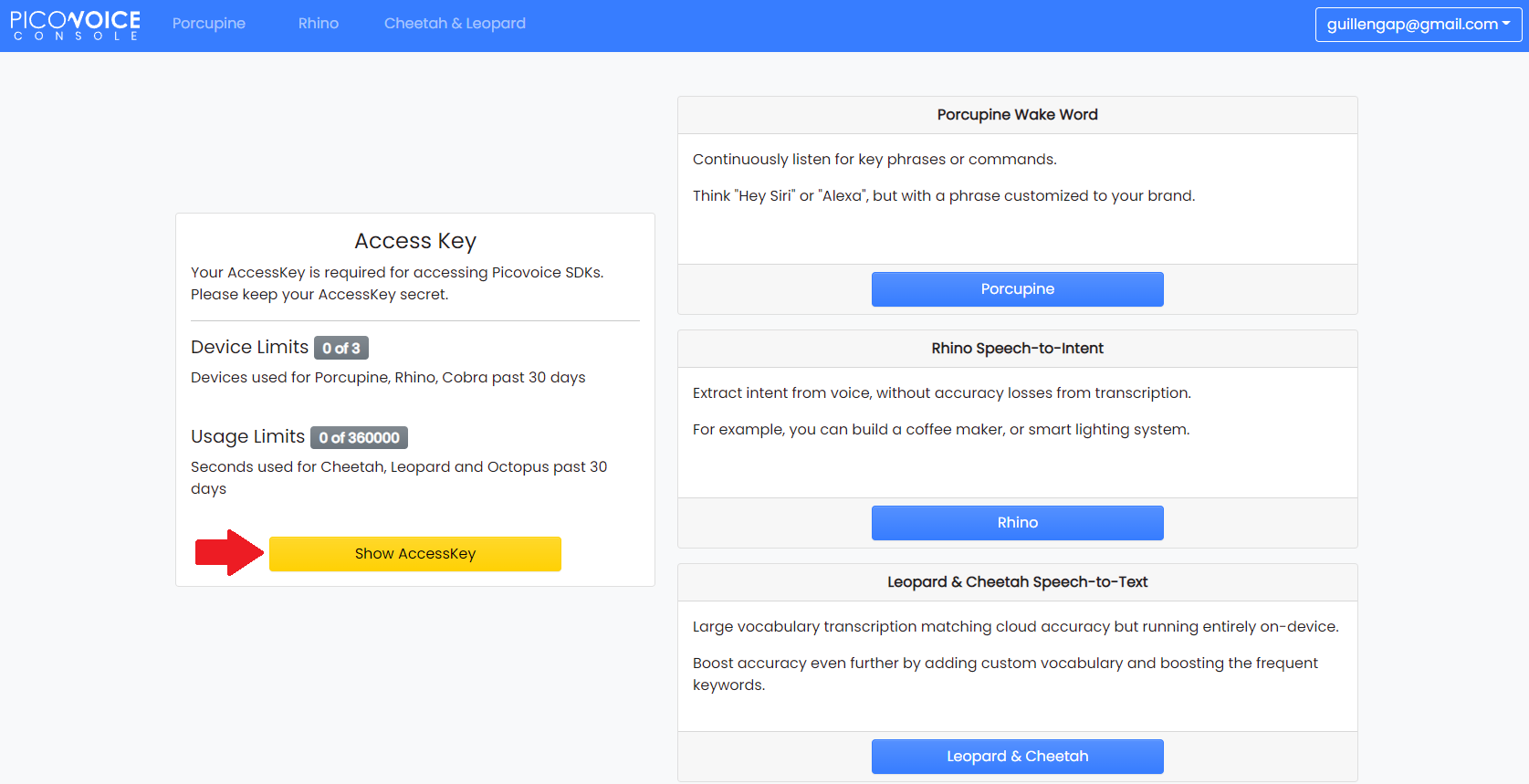
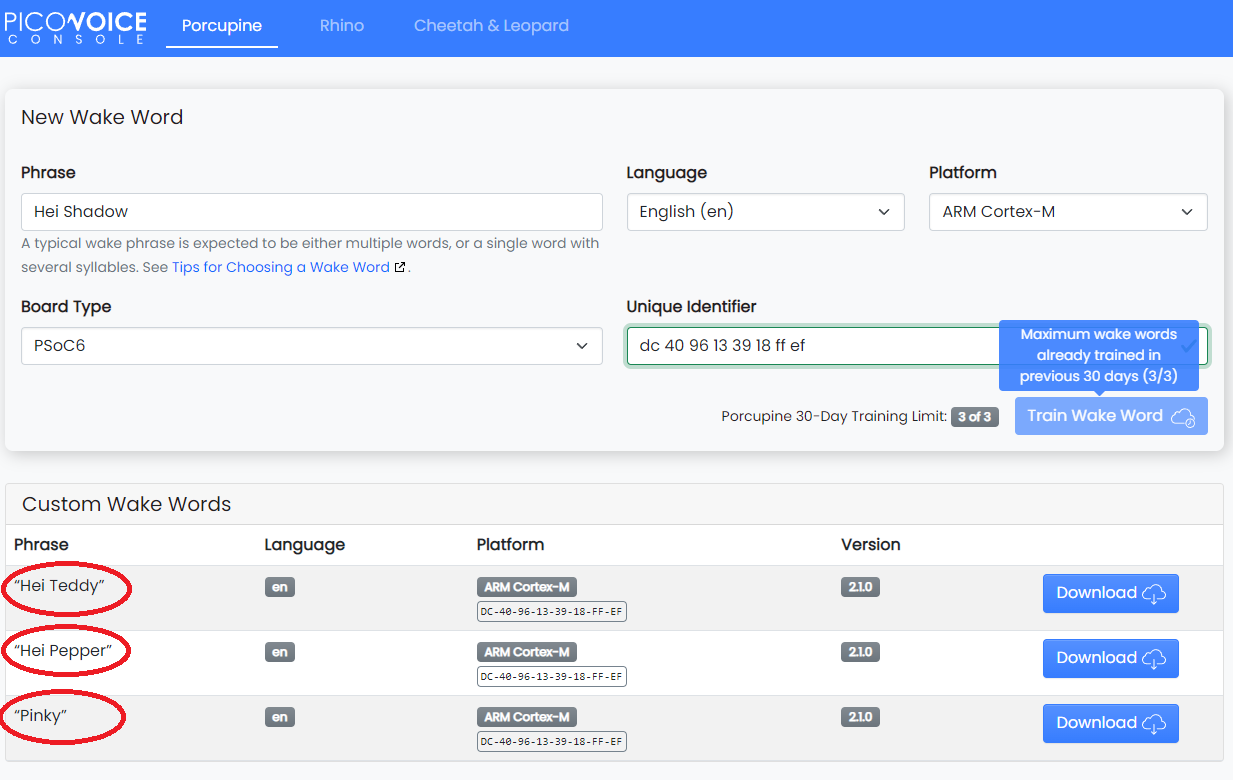
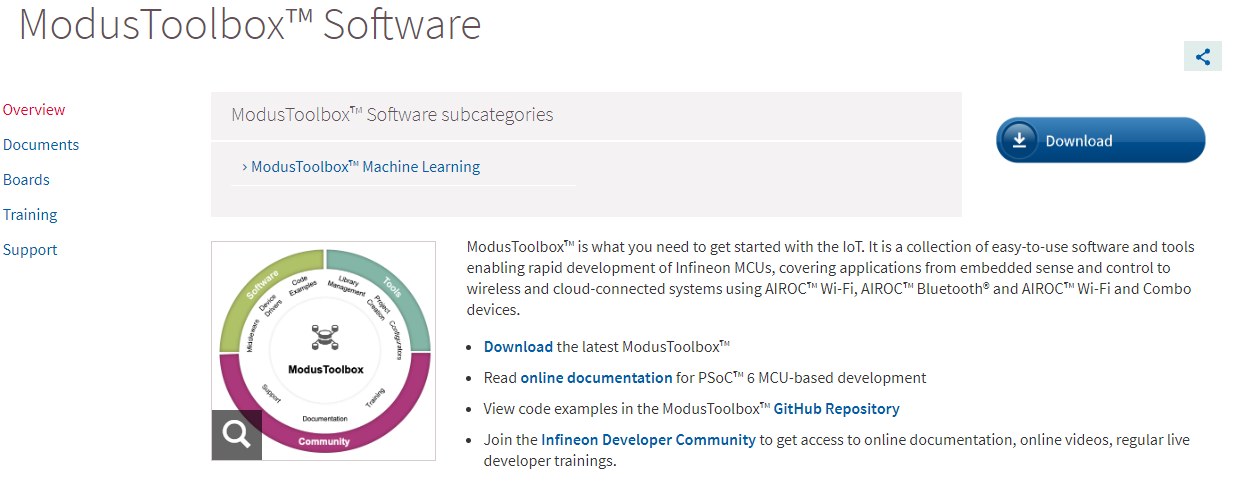
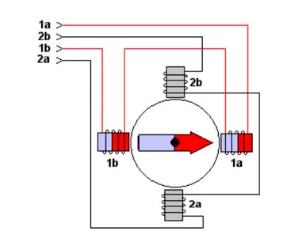
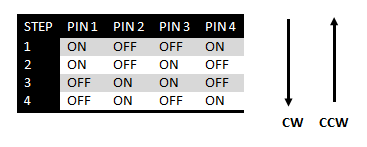
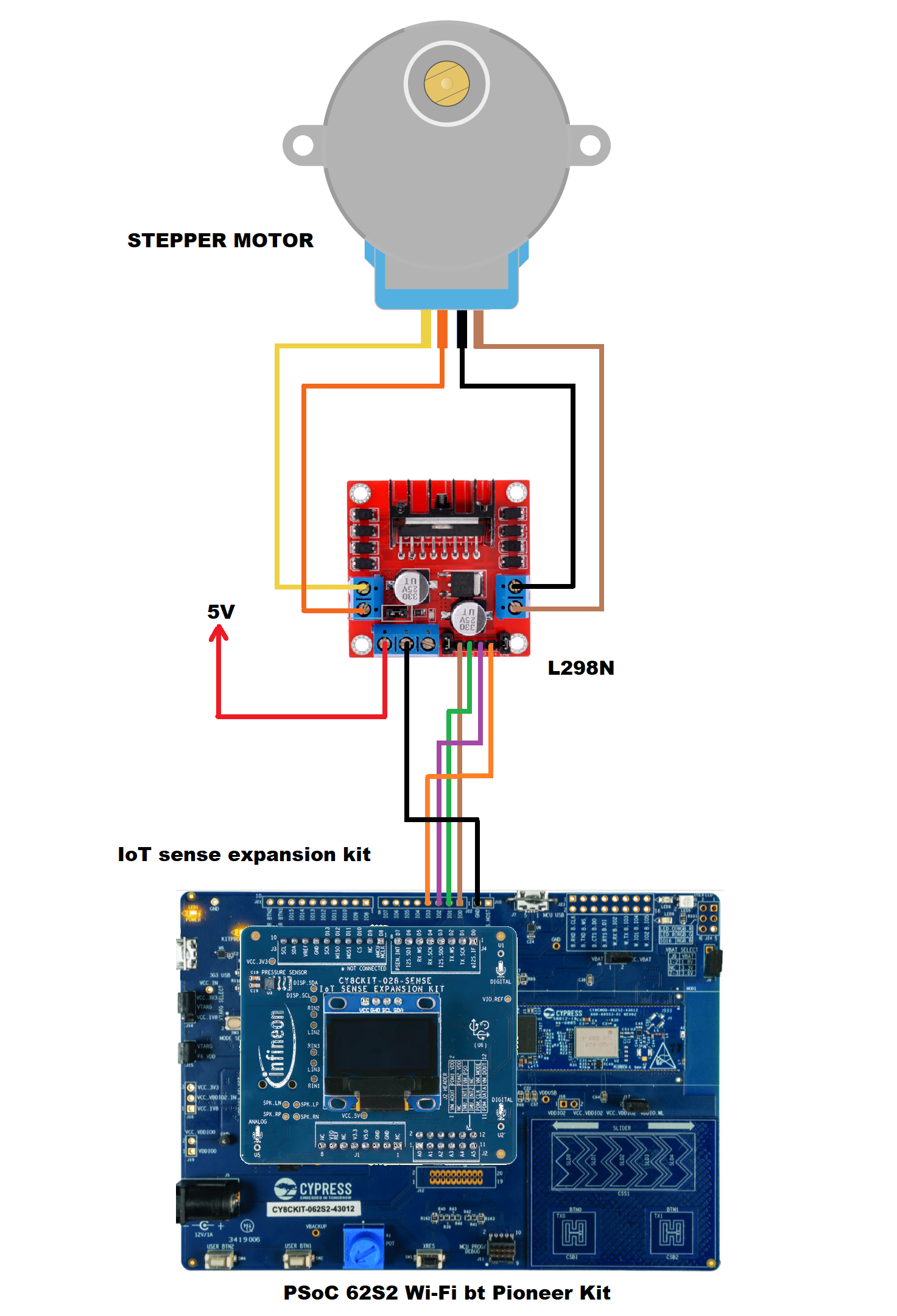
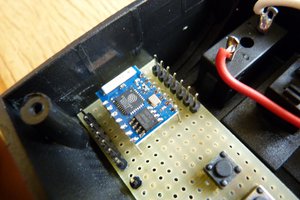
Guillermo Perez GuillenThis is a smart elevator to scale. A real elevator probably uses a huge A/C motor with sensors at each floor location. We certainly could use this approach with a smaller-scale but putting sensors at each floor is a lot of wiring, and we would have concerns about sensitivity and alignment. On the other hand, a stepper motor can be positioned precisely, but we would have to know exactly where we are and how far we have to go to do that; fortunately, I know how to use stepper motors and looks more interestingly. The other design concern will be with the elevator call buttons; here I will use machine learning with Modus Toolbox and Picovoice to control the ascent and descent using voice commands
0%
0%
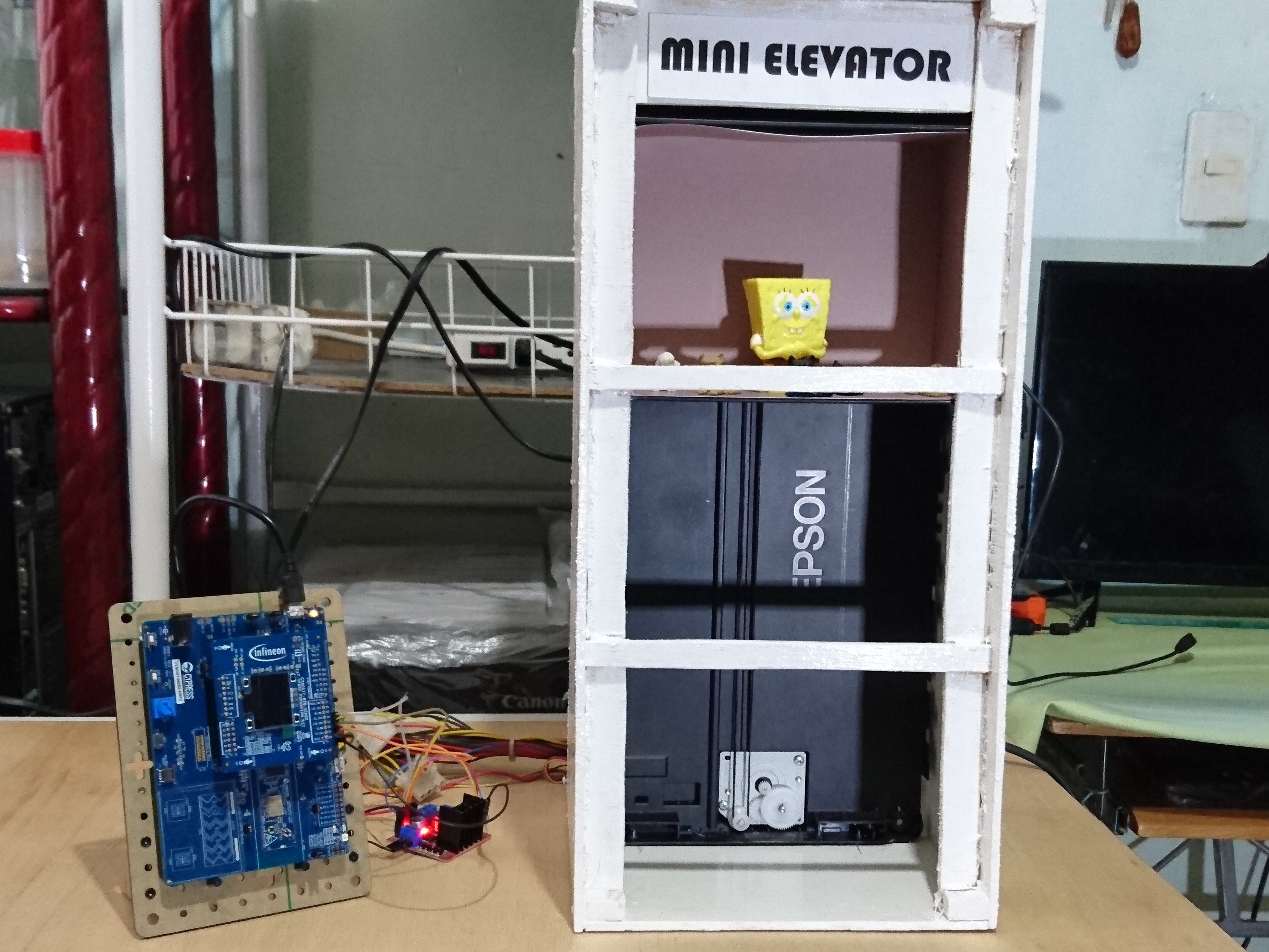
Smart Mini Elevator
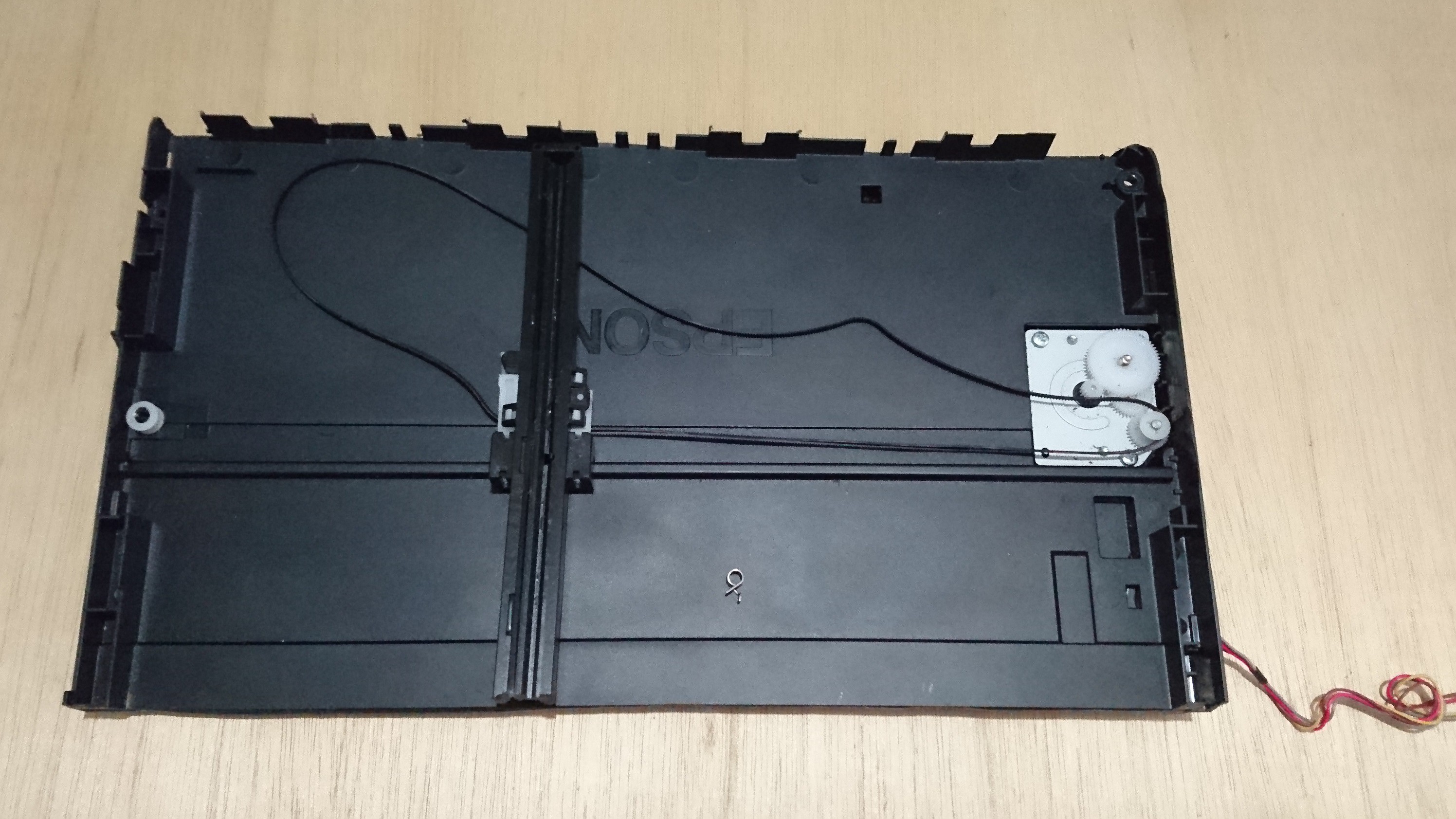
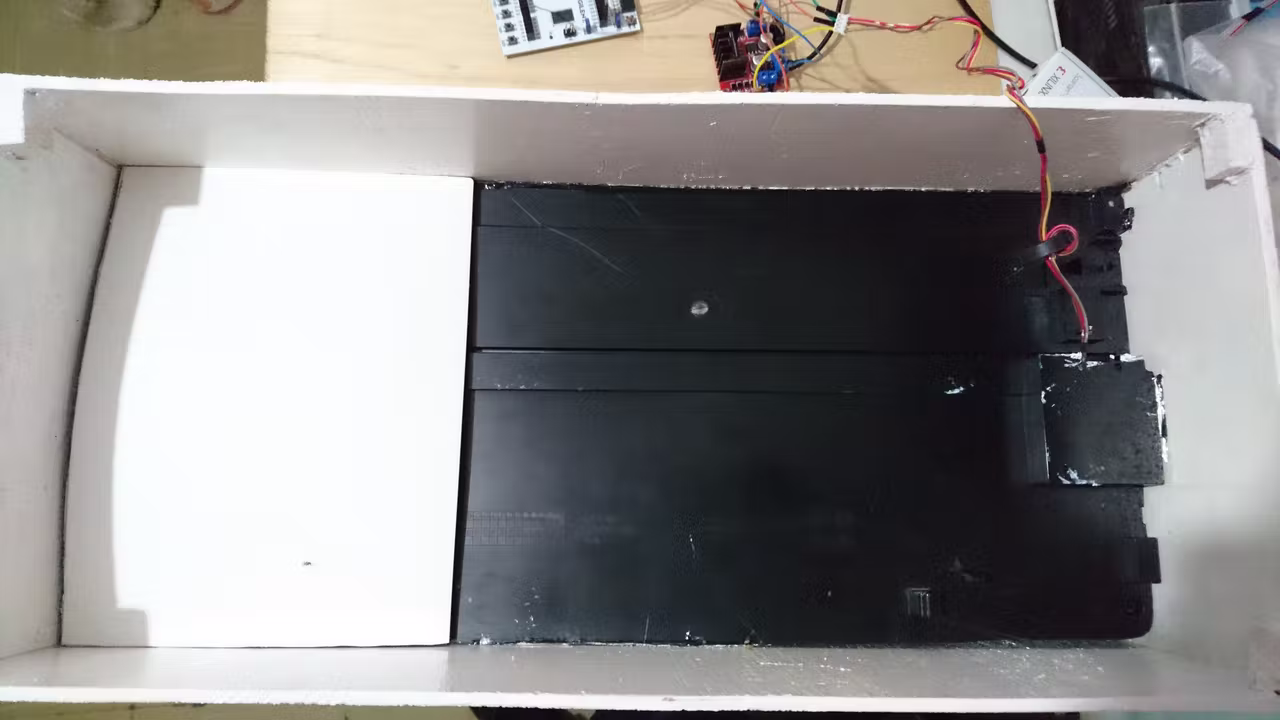
Old scanner hacked and turned into smart mini elevator
Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests





 Pedro Minatel
Pedro Minatel
 Gombe
Gombe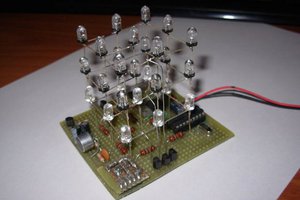
 gianlucag
gianlucag
 Roman
Roman
Also, this project is sustainable, because to build it I have recycled old electronic components and wood.