 Jean-François Poilpret
Jean-François PoilpretConway's Game of Life
This project implements well known Conway's Game of Life.
Note that this implementation uses Periodic Boundary Conditions to simulate a field of an infinite size, i.e. each boundary is connected to the opposite boundary. This makes algorithm a bit more complex to implement but it mimics better the intent of this game.
How to play
First, you need to setup the initial lives (first generation) on the 8x8 LED matrix.
For that, you use 2 knobs (potentiometers) to point to a cell (blinking LED) and a button to change its state (alive or not).
You can define the first generation any way you see fit.
Once you are done with first generation setup, you can start the game by pressing the START button.
Then, generations get calculated and displayed, one after another, at regular intervals (speed is controllable through the left knob used in the previous setup stage), from a few hundred ms to a few seconds.
The START button can also be used to pause the game, then resume it at a later time.
The situation where we reach a generation with no cells alive, is detected and a smiley displayed to show that.
If the system reaches a stable situation (with live cells that never change), this is indicated by blinking those cells.
The following video demonstrates all that:
Circuit & Prototypes
The circuit is based on an ATmel ATtiny84A AVR MCU that contains all logic.
The ATtiny84A has 8KB flash (code and init data) and 512 bytes RAM (for static and local variables in stack), hence a smaller MCU like ATtiny24 (2KB flash and 128 bytes RAM) would work as well, but I did not have any in my drawers, hence I did not test it.
The ATtiny84 is a tiny MCU with "only" 11 available IO pins (digital and some analogic).
Hence addressing an 8x8 LED matrix is better done using SIPO (Serial In, Parallel Out) shift registers, I used 2 chained 74HC595, one for matrix rows (LED anodes), the other for the columns (LED cathodes). I added current-limiting resistors to all 8 columns, to avoid roasting the MCU. Wiring for this takes only 3 digital output pins of the MCU (data, clock and latch).
LED matrix addressing is done though multiplexing (display one complete row at a time during a few ms, then display the next row, and so on). If all rows get "swept" fast enough, then human eye persistence makes you think all the matrix is displayed at the same time. I determined (after experiments) that showing each row during 2ms, then handling the next, i.e. 16ms to display all 8 rows, was the longest delay I could use. In the final program, I use 1ms for that duration.
For 1st generation setup, I originally used 3 push buttons, one Previous/Next pair to position the "cursor" (blinking LED) to the cell which we want to change state (dead or alive), then one button to switch the state of currently selected cell. This worked fine but that made the first phase very slow to setup for the end user. Wiring here required 3 digital inputs (one per button).
I hence decided to use 2 rotating knobs (potentiometers), just like the famous "Etch a Sketch" toy, to go faster to a position in the matrix. I kept one push button for changing the state of the currently selected cell. Wiring then took 2 analog input pins and 1 digital input pin.
An analog joystick with a button on top would probably be the ideal device for this, but I did not have one at disposal. Anyway, the program and the wiring should remain the same (or roughly so for the wiring).
The circuit has another button, used to start the game (used to tell the system that setup of the first generation is finished) and also suspend it at any time, then resume it.
Finally, to make the project a bit more challenging, trying to use the last available byte of code, I decided to reuse one of the pots used for initial setup for controlling game speed.
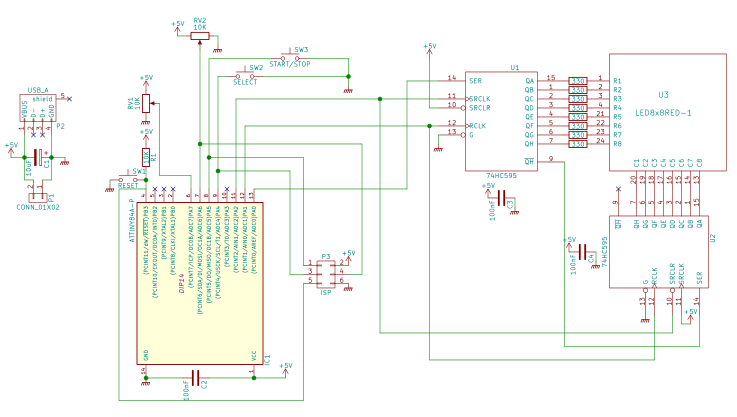
Here are the schematics for this circuit (made with KiCAD):
My first prototype was originally developed on an Arduino UNO (it uses an ATmega328P, compatible with ATtiny, with just more pins, more bytes and more features on chip). The advantages are first that it is easy to upload programs to an Arduino with just a USB cable, then we can use ATmega328 UART (connected to USB) to send traces to a console, which is useful for debugging the program.
The rest of the prototype circuit (LED matrix, resistors, SIPO IC, buttons, pots, caps) was originally put on 2 breadboards:
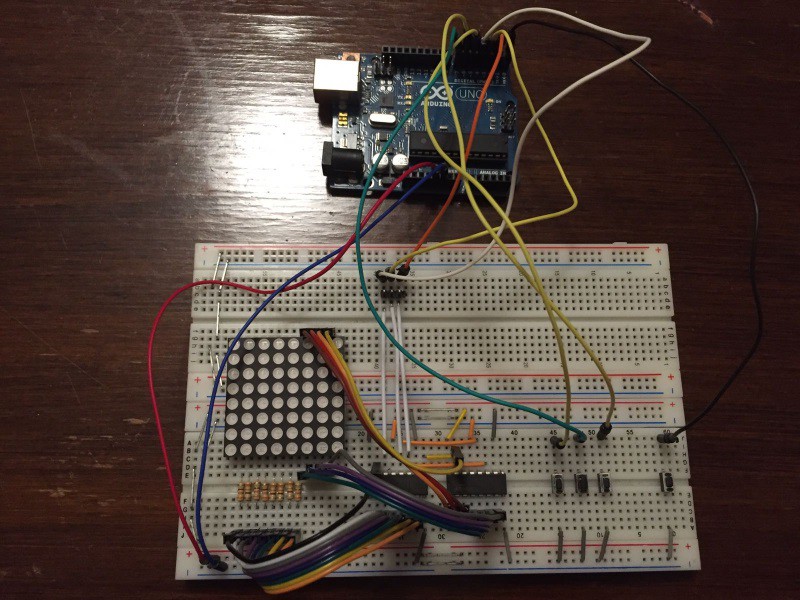
The initial prototype above does not include potentiometers yet, and only relies on buttons to select a cell in the matrix.
For the first tests on ATtiny84A, I have used a simple test board I have made in the past, that just contains the ATtiny84 with pin headers to all its pins:
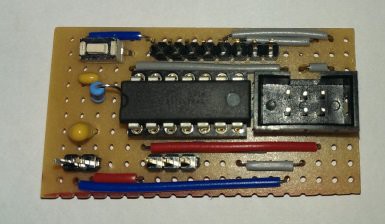
I then reused the same breadboarded circuit as before.
For the final circuit, I used two 50x90mm stripboards, stacked together, the above board containing all "UI" stuff (LED matrix, buttons, potentiometers), the under board having all electronics (MCU, IC, resistors, caps, ISP header). Both boards are stacked with pin headers, just like Arduino shields. I designed those with LochMaster.
Original LochMaster design files are available on GitHub. (these can be displayed with a free viewer). Here are drawings of the stripboards:
| UI board (above) | Logic board (under) |
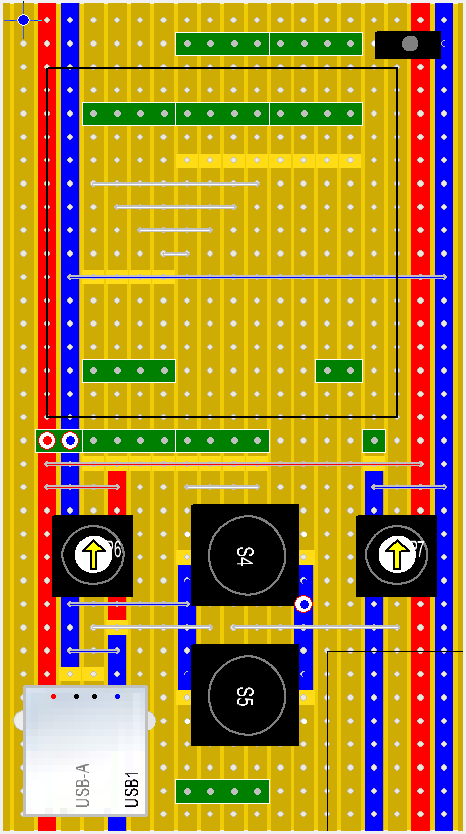 |  |
And here are the actual stripboards ready (without IC and LED matrix):
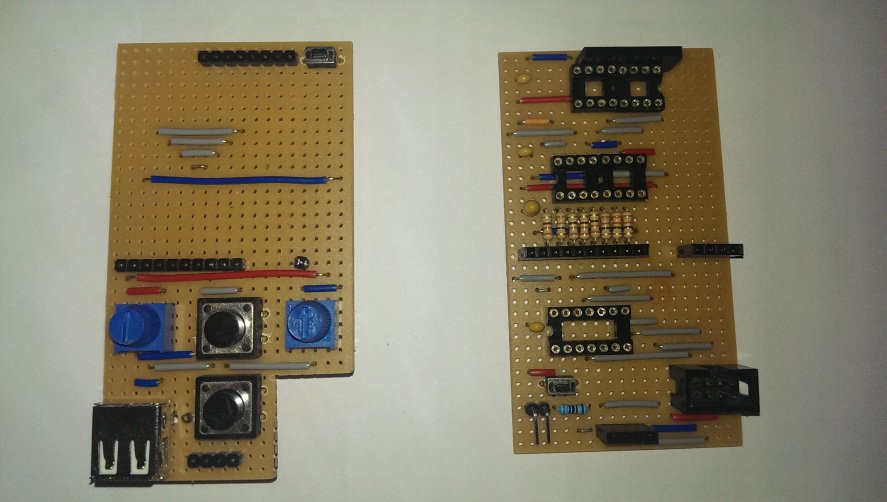
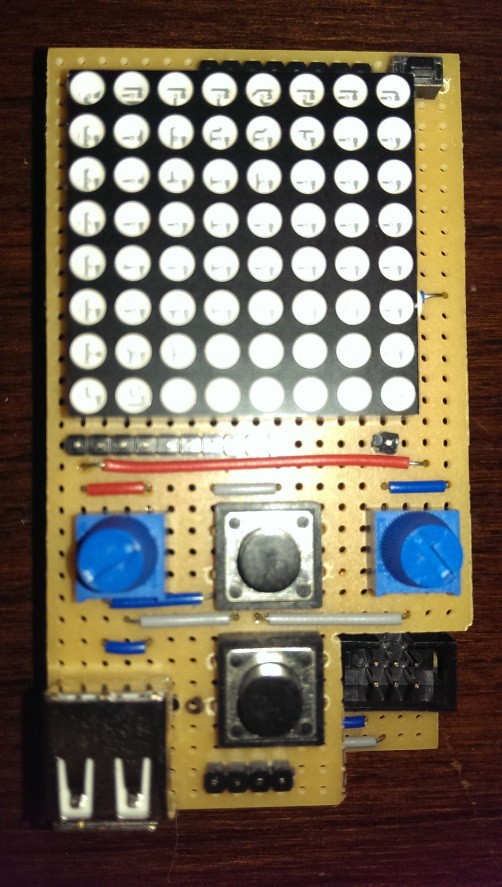
Final stacked boards, ready to operate:
The code
All code is written in C++ language (I use C++11 standard).
For some parts (digital IO, analog input), I decided to use some elements of my FastArduino library, which is actually a generic AVR library that I started writing in 2016, with a focus on code speed and size optimization.
I use the official ATmel AVR 8-bit Toolchain 3.5.3 - Linux 64-bit which is not the real latest toolchain (latest as of December 2016 was 3.5.4), but I guess building should work the same on latest 3.5.4 toolchain, but it may have different code size (better or worse).
Since I am currently satisfied with 3.5.3 toolchain, I do not foresee updating it within the next few months.
The program is divided into the following source files (excluding code from the FastArduino library itself):
- Conway.cpp: the main file, contains all constants used in the program (pin numbers, time delays...) and the main() function, in charge of instantiating all objects used by the program, and performing all 3 steps of the game: game setup, game loop, end of game.
- Game.hh: contains template class GameOfLife which points to the current generation state (as an array of unsigned integers) and implements the algorithm to progress from the current generation to the next one. The template is parameterized by the board size (number of rows and type of a row, defining the number of columns), but for the hackaday.io 1KB challenge, we use default values of 8x8.
- Multiplexer.hh: contains template class MatrixMultiplexer, plus a few helper classes, which is in charge of storing the state of each LED in the matrix, i.e. the state of the game board, and ensuring it is displayed through multiplexing, i.e. display one matrix row at a time, one after the other. This class also handles blinking of particular LEDs as needed. The template is parameterized by the board size (number of rows and number of columns), but for the hackaday.io 1KB challenge, we use default values of 8x8. The helper classes present in this file are *traits* classes, that are used to help determine settings, used by MatrixMultiplexer, different for each template intantiation, e.g. an 8x8 matrix Vs. a 16x16 matrix.
- Button.hh: a simple implementation of a debounced button wired on an input pin, with a pullup resistor.
Since the program does not use AVR Timers (see below for an explanation why), classes with methods that depend on timing, e.g. MatrixMultiplexer.refresh(), Button.state(), use an internal counter with an upper limit which is calculated based on a hard-coded delay (1ms) used by the loop of each step of the game. That makes those classes hardly reusable in a real design, where one would prefer using a hardware timer; that's the reason why they are part of the Conway example, rather than being part of the FastArduino library itself.
Conway program uses the following subset of FastArduino library:
- time.hh: busy loop delay functions (us and ms)
- AnalogInput.hh: self explanatory
- SIPO.hh: handles output to a chain of one or more shift registers, through 3 output pins
- FastIO.hh: handles digital IO (used by Button.hh and SIPO.hh)
Since the program is fully "templatized", this means it can easily be reused to handle other sizes of LED matrices. I successfully checked it on a 16x16 LED matrix (with 4 shift registers then).
However, note that code size increases when compiled for larger matrices than 8x8:
- 8x8 matrix: 962 bytes
- 16x16 matrix: 1256 bytes
The following video demonstrates my prototype with a 16x16 LED matrix, showing the famous "Lightweight Spaceship" pattern moving forward through the LED matrix:
How to build the program (Linux)
First off, ensure your Linux box contains the ATmel AVR 8 bit toolchain (I use 3.5.3, latest is 3.5.4) and your $PATH points to its bin directory.
The following commands show how to build the Conway 8x8 program:
> git clone https://github.com/jfpoilpret/fast-arduino-lib.git
> cd fast-arduino-lib
> make CONF=ATtiny84-Release build
> cd examples/complete/Conway
> make CONF=ATtiny84-Release build
That's it! In a few seconds you get (in dist/ATtiny84-Release/AVR-GNU-Toolchain-3.5.3-Linux):
- conway.hex: the hexadecimal representation of conway executable program, ready to be uploaded to an ATtiny84
- conway.dump.txt: the full dump file, with assembly code, of conway executable program; that has been useful to track down where most code bytes were used, facilitating the selection of optimization focus
The following commands will upload the generated program to your ATtiny84, connected to your box through an ArduinoISP (that is a USB-ISP programmer that is very useful for AVR programming). You may as well use other programmers for this task, but then you'll probably have to update Makefile-FastArduino.mk file (part of FastArduino library) to accomodate your programmer:
> make CONF=ATtiny84-Release fuses
> make CONF=ATtiny84-Release flash
The first command sets the fuses of the MCU and is mandatory the first time you upload the program; you won't have to repeat this command on later uploads if you change the program.
Note that these "make targets" (fuses and flash) simply delegate all the work to the well-known avrdude binary, which must first be properly installed on your Linux box.
For more information on my personal build setup, you can refer to this document.
The challenge
Making all the program for this game to fit within 1KB of flash has been a big challenge.
Here is a summary of the general guideline I used to squeeze code size in this project:
- Don't use global variables as accessing them requires special LDS/STS instructions which are 4 bytes (instead of 2 bytes used by most AVR instructions). Also, global variables will trigger initialization code by GCC, which takes a few extra dozen bytes. Hence, exclusively use local variables everywhere.
- Don't use ISR (Interrupt Service Routines) as each ISR will generate more than 50 bytes of code, just to save current registers context to the stack and restore it before the end of ISR. Also using an ISR generally implies using one global variable (or more) to communicate information between the ISR and the main program loop.
- Avoid virtual methods in C++ classes as it generates vtable data for each class containing virtual methods (one vtable typically uses 4 bytes + 2 bytes per virtual method in the class), stored in Flash and copied to SRAM at startup. Also, the code to call a virtual method uses more instructions than for a non virtual method.
- Use C++ templates in a smart way, i.e. for all code that takes only one or a few instructions, e.g. for digital IO, FastArduino FastIO templates just generate inlined CBI/SBI instruction to clear or set the pin.
- Force inline methods (inline and __attribute__((always_inline))) when considered useful (e.g. very short methods or methods used only once). You may gain a lot by avoiding function prologues and epilogues.
- Use the smallest types that fit your data. AVR MCU are 8-bits processors, hence manipulating larger types than pure bytes will take more instructions. Also, prefer unsigned integral types to signed ones. Finally, avoid floating arithmetic at all costs as that will draw big libraries into your code size.
- Avoid multiplication or division at runtime (prefre using compile-time operations for constants) as this will also require extra code libraries included into your program code. Division and multiplication are allowed only for power of 2 (simple left or right shifts then).
- Replace switch with if...else if... code blocks as it seems GCC produces a lot of code for switch.
- Concentrate all pins needed by your program to a single port of the MCU, that will allow simpler (and smaller) initialization code (e.g. to setup output/input for each pin through DDRx and PORTx registers).
- Replace several methods with similar behavior (e.g. refresh methods in Multiplexer class with different blink modes) into one with a bit more complex code (more if conditions) but smaller than the sum of code of all other methdos used in the project.
- When using template classes with several instances (different template arguments), if some code in template is rather big, then try to factor it out to a non-template abstract base class, and make the template class derive from it.
- Replace "classical" algorithm to count neighbours of a cell to determine next generation, with an optimized bit-parallel processing, thus removing all conditional statements (the algoriyhm exclusively uses boolean operations , such as AND, OR, XOR, NOT, on bytes) and removing an embedded loop for columns. This one change enabled more than 100 bytes gain in code size, let alone speed efficiency. Thanks Yann Guidon for his suggestion on that one. It took me several days to understand how to do it but it was worth it.
- Remove vector table and GCC init code altogether (about 50 bytes). This was done by using option -nostartfiles at link time, in addition to creating specific void __jumpMain() __attribute__((naked)) __attribute__((section (".init9"))); function, placed at address 0x0000 (i.e. directly jumped to at boot time and upon reset of the MCU) to call standard main().
Some options I had in mind but did not need to use for this contest (hell, 1024 bytes is just too much :-)):
- Use AVR special GPIORn addresses; I am actually not sure whether and how I could have gained something with that, so I did not even try it.
IMPORTANT: note that these guidelines are not always possible in all projects; for instance, it is difficult to avoid ISR when you need to perform serial communication (UART, SPI, I2C), when you need a Timer...
The Contest
My build includes generation of 2 evidences that the program, built for the circuit with an 8x8 matrix, is under 1KB of code:
- avr-size generates an output with program size information
- avr-objdump generates a dump file conway.dump.txt with the list of all symbols and all assembly code part of the final executable
For an ATtiny84A (8KB available for code, 512 bytes for data), here is the output of avr-size:
AVR Memory Usage
----------------
Device: attiny84
Program: 962 bytes (11.7% Full)
(.text + .data + .bootloader)
Data: 0 bytes (0.0% Full)
(.data + .bss + .noinit)
The dump file includes at its beginning the list of sections with their respective sizes:
Sections:
Idx Name Size VMA LMA File off Algn
0 .text 000003c2 00000000 00000000 00000054 2**1
CONTENTS, ALLOC, LOAD, READONLY, CODE
1 .data 00000000 00800060 00800060 00000416 2**0
CONTENTS, ALLOC, LOAD, DATA
2 .comment 00000030 00000000 00000000 00000416 2**0
CONTENTS, READONLY
As one can see, the code size in .text section is 0x03c2, i.e. 962 bytes, whereas the .data section is empty.
This information is based on github code tagged "HACKADAY-1KB-CONTEST" at https://github.com/jfpoilpret/fast-arduino-lib/releases/tag/HACKADAY-1KB-CONTEST