karen.soledad.quezada
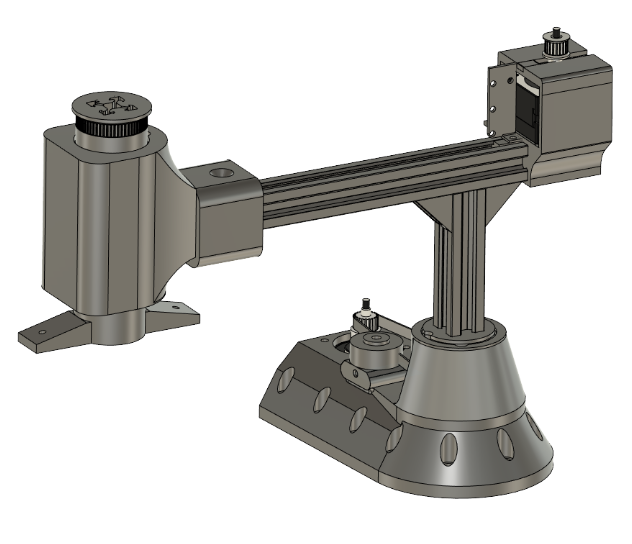
karen.soledad.quezadaUpdate: the C-Space of the pristmatic is bigger than the C-Space of a regular Scara. This, due to the linear movement. It's expanded with lines of different slopes, but it leads to difficult poses to the manipulator that makes hard controlling it's cinematic.
The correction now is that the W-Space is the same as the W-Space of a regular Scara since it allows to work corectly with the cinematic of the robot.
Files .f3z link: https://www.thingiverse.com/thing:5733435
To do:
Software:
1) Test the code in python, wich contains the inverse kinematic of the manipulator.
2) Check that the serial communication (between python and arduino) is working.
3) Program in python the 8 basic strokes in chinese calligraphy.
Hardware:
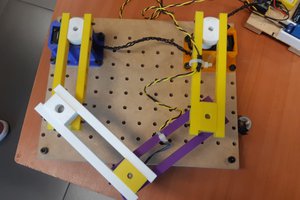
1) Properly accommodate the wires in the robot. Some movements tangle the wires, this is a critical problem and must be fixed.
2) Improve the pieces of the brush, because they break easily, thus, must be replace often. This can be due to problems in design or because of quality of 3D printing.

 tab
tab
 Will Donaldson
Will Donaldson