01 Precisely What I Need
There is a wide variety of ROS robot cars available on the market. Working in education industry, I have a comprehensive understanding of the related products. A good ROS robot car should strike a balance between practicability, stability of design and logic, completeness of software.

It is relatively easy to outfit a robot with various hardware components. However, the real challenge is to turn the robot into a real robotic platform by making these hardware components work systematically. JetAuto from Hiwonder meets my requirements for a platform that can accomplish this task.
02 Tidy Wiring and Reserved Space for Expansion
When I received the robot, I was immediately struck by its elegant design. It features a well-organized layout, with distinct partitions separating various hardware components. Furthermore, the anodized aluminum alloy housing not only nicely protects inner hardware but also reserves space for expansion.

Moreover, the wiring of JetAuto is both tidy and standardized. ROS educational robots generally have complex functions and numerous configurations. That means there are a multitude of cables connecting controller and modules. However, JetAuto’s user-friendly design resolves this issue by simplifying the installation and removal of accessories, including the battery.

03 Abundant Functionalities
Thanks to its comprehensive tutorials, the assembly and wiring of JetAuto are pretty easy. Take a look at APP control. UI(User interface) of this APP is clear and you can experience diverse games on it. What impressed me most was the inclusion of Lidar games within the APP, which I initially thought only supported basic movement controls.

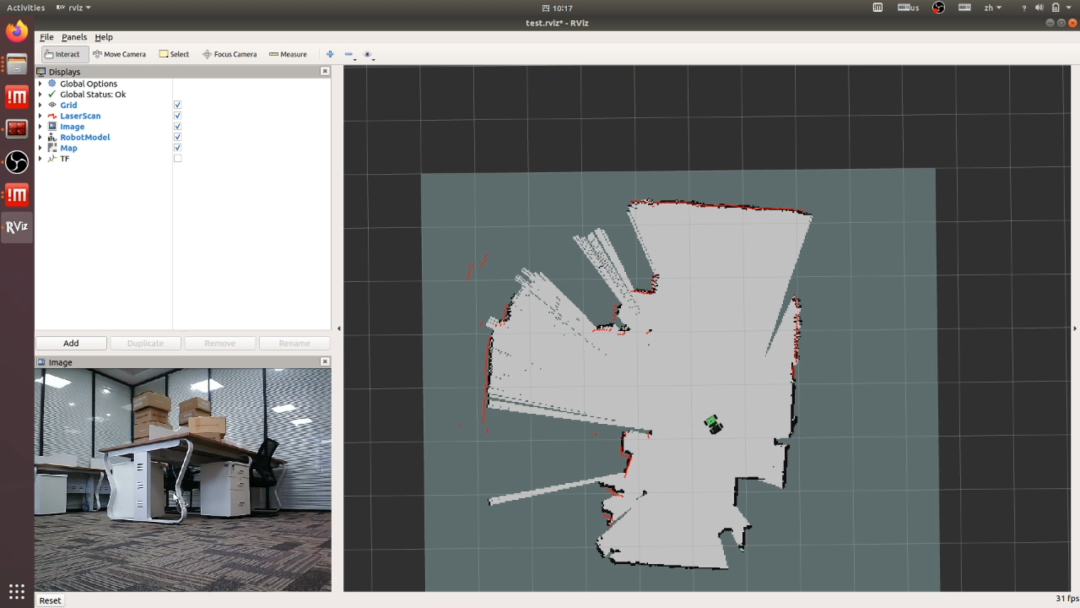
One of the main applications of ROS robot car is mapping navigation. It is meaningful to discuss how Lidar(2D) and depth camera(3D) work individually and cooperate to realize SLAM. The depth camera, mounted on a base that can rotate horizontally, provides JetAuto with an expanded field of view, a more precise understanding of its surroundings, and greater stability when performing visual tasks such as tracking.

What's more, JetAuto maps quickly and precisely. Its mecanum wheel chassis offers unparalleled speed and steering efficiency compared to other bionic robots. When placed in an unknown environment, it is able to plan the path with ease. During navigation, its positioning results closely synchronize with its actual location. In addition, its Lidar can dynamically detect sudden "intruder" so as to achieve obstacle avoidance, which is a valuable simulation of real-world applications.


JetAuto offers ample man-robot applications. On the hardware front, depth camera and microphone array are excellent in recognition, which is closely linked to mighty computing power of Jetson Nano. In voice control mode, JetAuto can give quick response to user commands and get them done correctly. By merging voice control with SLAM, it is possible to create automated scenarios, such as voice navigation, that enhance the overall user experience.


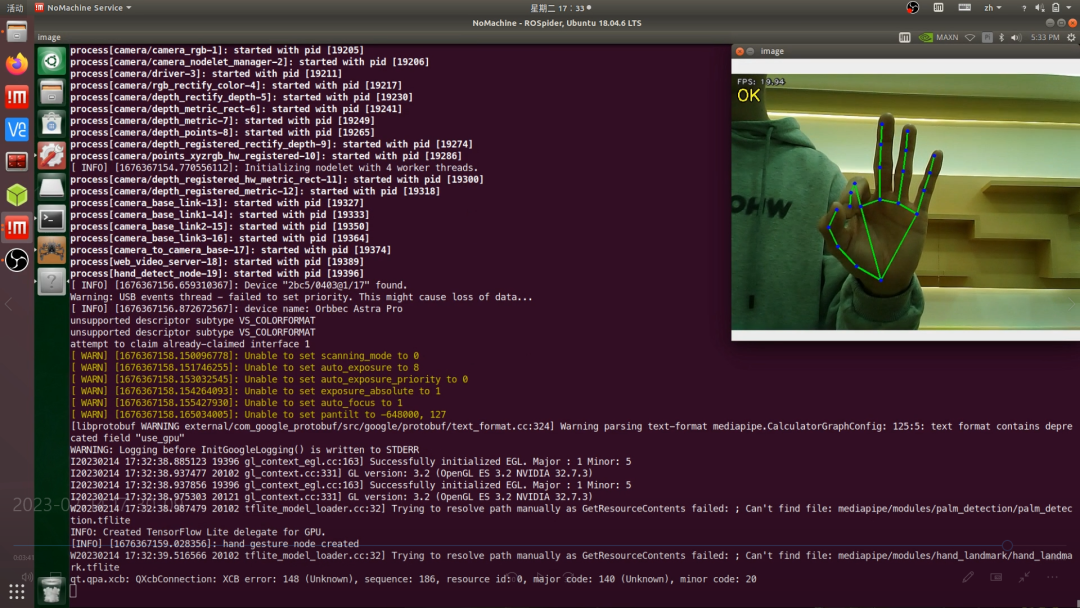
Human body recognition by depth camera together with Jetson Nano is JetAuto's another highlight. Whether it's gesture, facial feature, limb and body frame or fingertips trajectory, JetAuto can recognize swiftly and accurately. To achieve intelligent interaction, Hiwonder incorporated action commands into JetAuto's routines so that JetAuto can perform corresponding actions based on its recognition results.

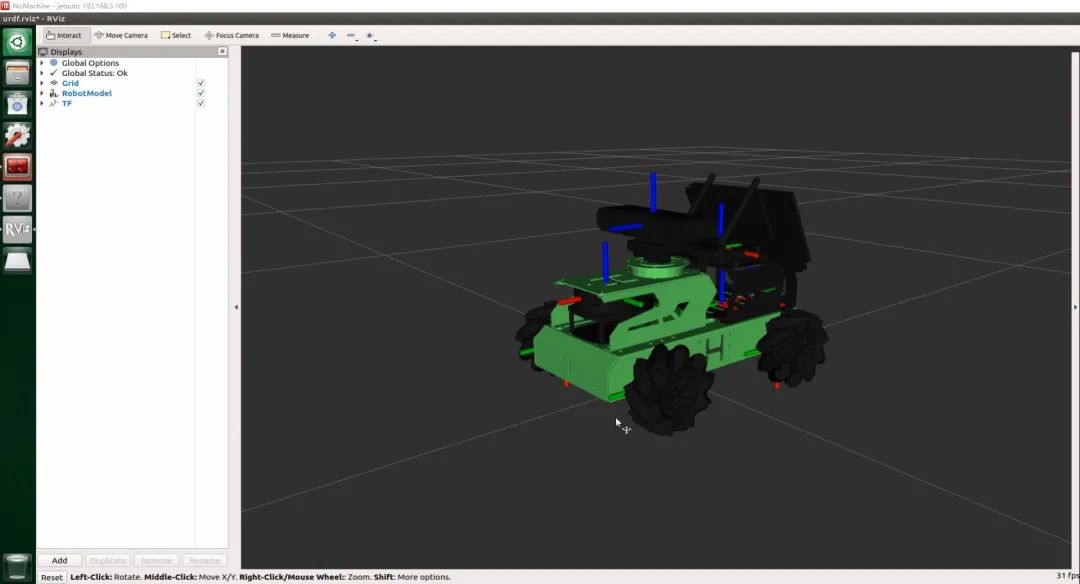
Based on ROS, JetAuto allows you to simulate robot control on computer. Pre-verify motion algorithm to avoid damage caused by algorithm errors. Visualize and observe mapping and navigation process through rviz. Its well-developed system of simulation in virtual environment reduces requirements for experimental environment and improves experiment efficiency.
I understand that many people are concerned about source codes and routines when choosing a robotics platform. Fortunately, Hiwonder...
Read more »
 Ahmed Azouz
Ahmed Azouz

 Will Donaldson
Will Donaldson
 therobotstudio
therobotstudio