 Adrian Prinz
Adrian PrinzThe fixStellar project aims at developing a smart astronomical camera.
fixStellar is composed of two components:
a) the fixStellar active optical tube assembly (OTA) with internal star tracking
b) the fixStellar mount which is you for positioning the optical assembly
The following characteristic features are key for the project:
- Easy Setup - no alignment necessary, because the telescope will recognize the exact position it is pointing to using a camera in conjunction with a plate solving algorithm.
- Interactivity - instead of only using the fully automatic Go-To-System you can move the telescope to any target manually guided by an easy-to-use LightGuide-Display.
- Great Flexibility - the optical assembly has an internal mirror-based tracking system which keeps the moving stars on a fix position (you can guess where the name "fix"-stellar comes from ;-) on the camera chip even when the telescope is not moving, but the stars are. This allows to use the OTA without the mount. Useful when space and weight is a critical point e.g. when doing a mountain hike.
- Extras - use your smartphone or the buttons and the display as an user-interface. Couple fixStellar with universe2go+ to get the images directly imbedded into you personal planetarium. Automatically generate panos using the mount.
- Smooth, fast, accurate - the mount is driven by 2 brushless DC motor, with rotary encoders and two absolute encoders on the output side of the belt gear system. This allows for silent and smooth but very fast movements up to 90 Degrees per second which will allow the tracking of even fast satellites (incl. the ISS).
- Everything Automatic - Auto-Alignment, Auto-Focus, Auto-Tracking, Auto-Stacking, Auto-Panorama, Auto-Exposure
Technical Details (will follow in deep detail in autumn):
- Optics - apochromatic, aperture 80mm, focal length 525mm (f6,5)
- CMOS camera IMX462 (1920x1080, 2,9μm, 2376mV)
- 5 motors for auto focus, star-tracking, image derotation, positioning
- Raspberry Pi CM4, 2GB RAM on Waveshare Nano Base Board
- Sensors: BNO055 - Acceleration, Gyro, Magnetic field, BME280 - temperature, humidity
- Display: Waveshare LCD round display, 240x240 Pixel
- Control: 4 keys
Advance Features (just ideas by now...)
- high precision analysis of star position and brightness (reference photometry with GAIA DR3, statistical FWHM und HFD)
- Reference photometry based De-Bayering und Guided De-Noising (RPGD)
- Using mount to optimize stacked images for Drizzle algorithm.

 genericsoma
genericsoma

 vcarter0
vcarter0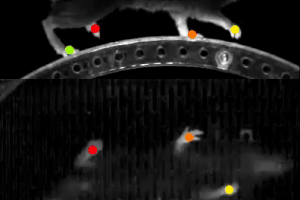
Exceptional design; beautiful in every way. Make this happen for a reasonable manufacturing cost then approach Meade, Clestron, Sony, etc.