 Achille
AchilleA very brief history
The OSR was designed and built by a small team within JPL who have since moved on to other companies after handing it off to the community. A few builders who had significantly contributed back to the project formed a maintainer team to keep the project up-to-date and later started work on a new version with lessons learned from building and maintaining the OSR. This maintainer team has been going strong for 4 years and counting.
What's different from the old OSR
While the original rover is an impressive design, featured on Hackaday in the past and inspiration for other projects, it hasn't held up over time as its parts more and more went out of stock or were discontinued altogether. The steep price of almost $3000 and hundreds of hours of building made it hard to maintain a sizable community to support the extensive documentation needed to make it accessible to pretty much anyone motivated.
Rather than double down on making everything custom, which require a lot of time and skills from builders and frankly was already done in other projects, instead this new version uses consumer off-the-shelf (COTS) parts wherever possible.
- Fully consumer-off-the-shelf (COTS) parts, not even 3D printing required. This means as soon as the parts arrive, you can start assembling and we're working on a build kit/page with Gobilda to make the ordering process even easier and error-free.
- Price slashed to almost half, with cost estimated at $1600. A full list of parts and prices is here.
- Consolidated vendor list and fewer parts. Whereas before you had to source parts from a dozen vendors, today you only have to order from Gobilda, Digikey/Mouser, and a few parts from Adafruit or Amazon (with several other options available).
- high quality, detailed documentation targeted for first time builders and high-schoolers. This was the case before, but we've switched from LaTeX to Markdown making the barrier to entry for contributions a lot lower and maintenance a lot easier.
- The entire model is publicly available in OnShape, which means anyone with a browser can look at it and adapt it without needing to have a working copy of SolidWorks or other desktop CAD software.
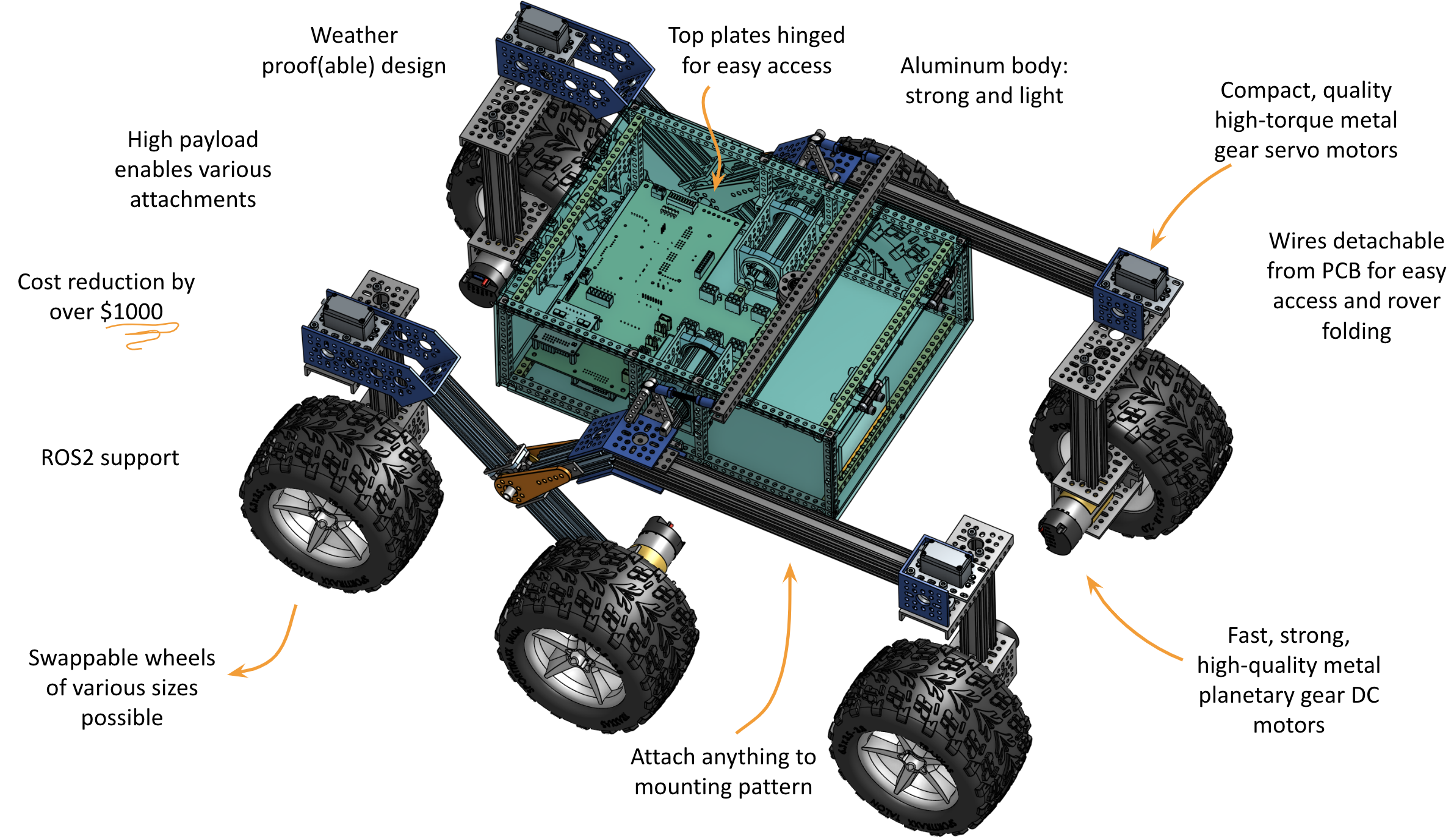
- The rover was built with maintenance and servicing in mind. Detachable wiring allows and hinging body plates allow servicing the rover quickly without the need to flip it over or unscrewing mechanical parts.
- Better ingress protection. The old version was not built with protection to splashes, dust, dirt, and sand in mind whereas this version not only provides basic protection to the elements, it's also easier to clean.
- The head with screen is no longer a standard assembly of the rover. While it was a great and cute addition, not everyone needed one, others modded it, and so we decided to make it optional to remove build time and cost.
What's different from other Mars Rover replicas
- The OSR not a one-off project, it is continuously upgraded and developed meaning that you don't have to worry to stumble upon a project that's really cool but almost impossible to recreate because lack of parts.
- The rover was not designed to look exactly like the real rovers but instead was built for earth. It uses machined aluminum, metal-gear high-power planetary gear motors, and other quality parts that are built to last and allow it to drive fast and scale big obstacles including stairs.
- While designed so that anyone can build it, it is also excellent for outdoor/difficult terrain robotics, being advanced robotics ready.
- The Gobilda metric build system allows easy attachment of new extensions, like a payload container, robot arm, or head.



 Steve Pendergrast
Steve Pendergrast
 Oskar
Oskar
 Brien Allison
Brien Allison
 invent2main
invent2main
The current link to the parts list seems to be: https://github.com/nasa-jpl/open-source-rover/tree/master/parts_list