 Andrei Gramakov
Andrei GramakovSeparation of the Software (independent of the hardware logic) and the Firmware (dependent on the hardware) has allowed me to implement the main robot logic on Windows without involving MCUs at all.
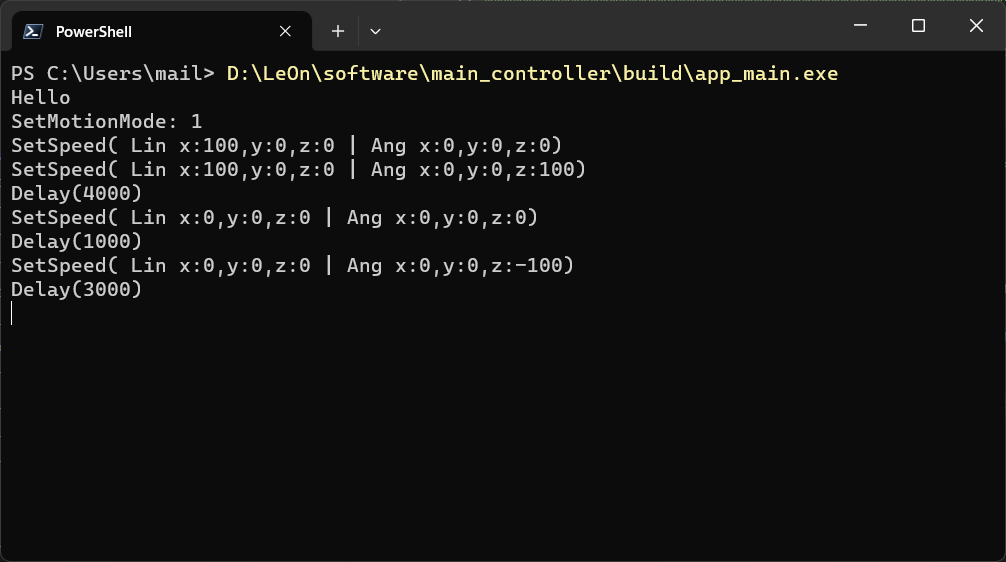
I packed all the code in a set of CMake projects producing static libraries. Including main.cpp - it is also a component. Then I assemble everything into an executable file - currently for the Windows platform. It can be called a Windows robot simulator:
The next step is to implement the driver part and then connect them together.
Quick QnA:
- Can it be done directly on MCU? Yes.
- Would it be faster to do this? Yes!
- Would it be scalable when the project grows? No!
- Could I easily port parts of the code to my other projects? No.
Source Code: https://github.com/an-dr/LeOn/tree/7c41b8b35d2450aba1adc6544145845a02f9a0eb/software/main_controller
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.