-
Log 7 -
01/09/2024 at 11:18 • 0 comments![]()
![]()
![]()
-
Log 6 - Modifications
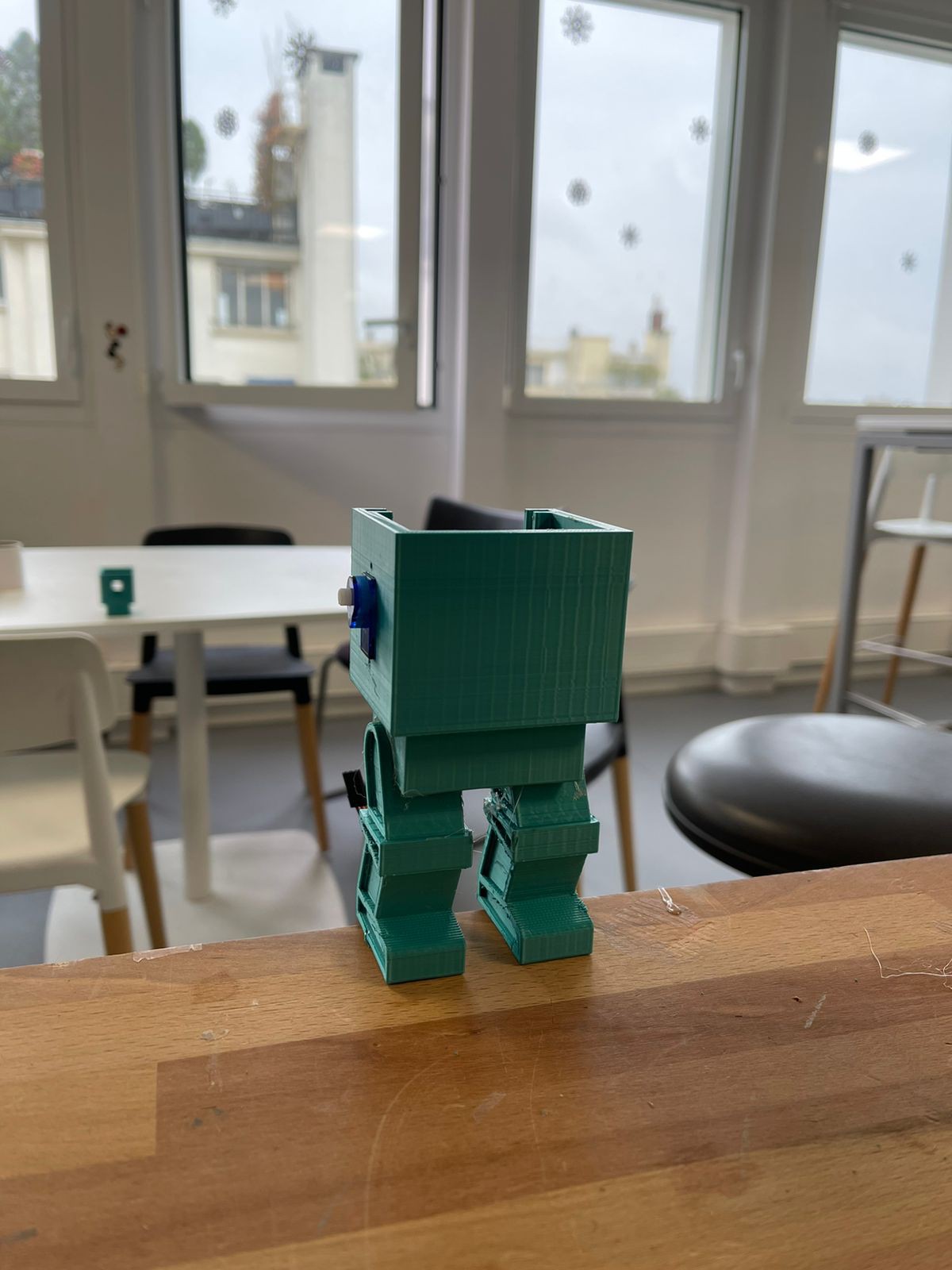
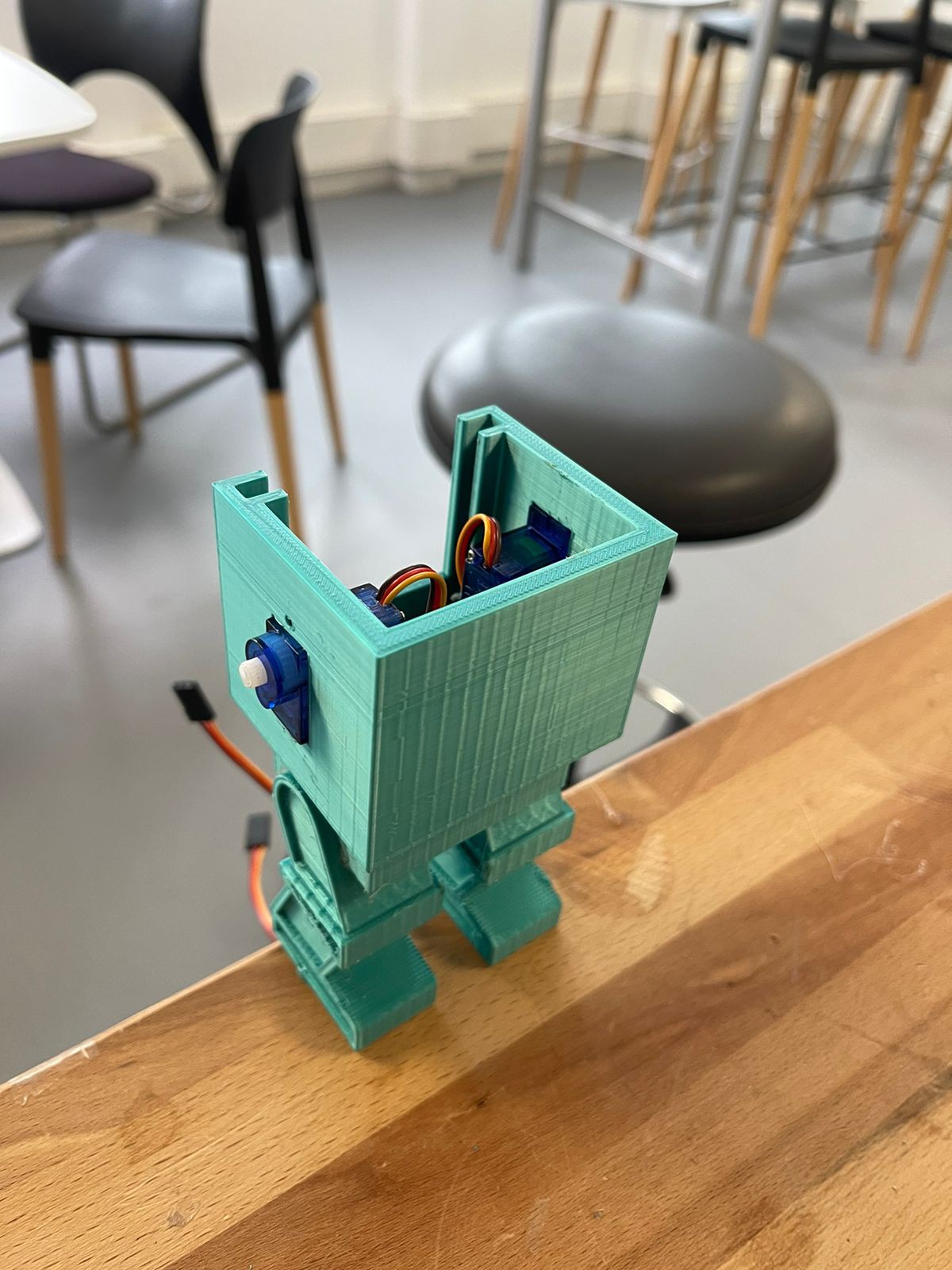
01/09/2024 at 11:11 • 0 commentsAfter having printed another robot, it still couldn't fit our accelerometer. So we decided to change the design completely. Then printed it, and everything fits.
We finished the code as well, so now everything needs to be assembled.
We also cut the ring out of wood
-
Log 5
12/12/2023 at 14:54 • 0 comments![]()
![]()
-
LOG 4
12/12/2023 at 14:28 • 0 comments![]()
![]()
-
Log 3
12/12/2023 at 14:27 • 0 commentsWe programmed the servo motors on Arduino, then modeled the robot's torso and legs to 3D print them. After printing, we realized there was a dimension error as we forgot to consider thickness and add a support. Consequently, we are remodeling our robot with the correct dimensions
![]()
-
Log 2
11/28/2023 at 15:45 • 0 comments- We started to program the accelerator with Arduino, as a trial. It's our first time working with this composant, so we are trying to figure this out on it's own for now.
-
28th november
11/28/2023 at 15:32 • 0 commentsToday's avancements :
- Editing of the description of our project
- Modeling of the ring completed : to test our model, we are printing the side and a screw to ensure that it's holding, we can't print the whole model yet seeing as we are not sure about all the dimensions yet.
- We decided to add legs to the robots, so that we can screw them directly
- For the 'remotes' in the players hands, we are thinking about making it as a ring or a bracelet. Still unsure.
- The design of the robot is still unsure to this day, we dont know what size or shape would be best. We want to wait for the composants to arrive, and adjust then the shape