0%
0%
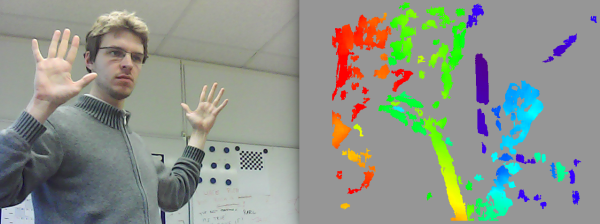
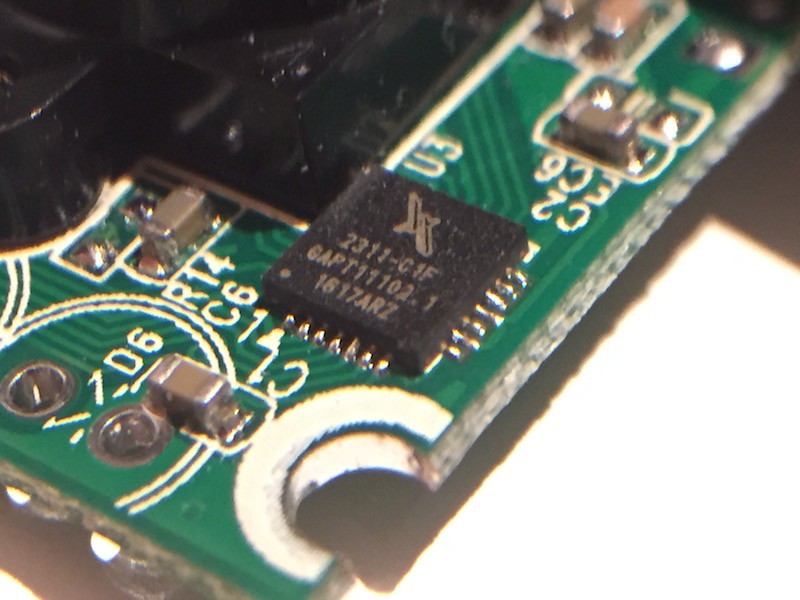
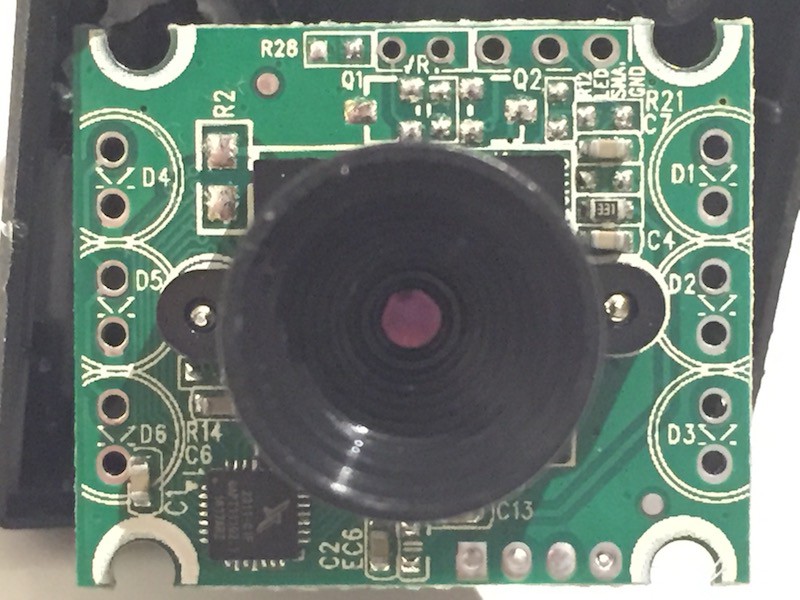
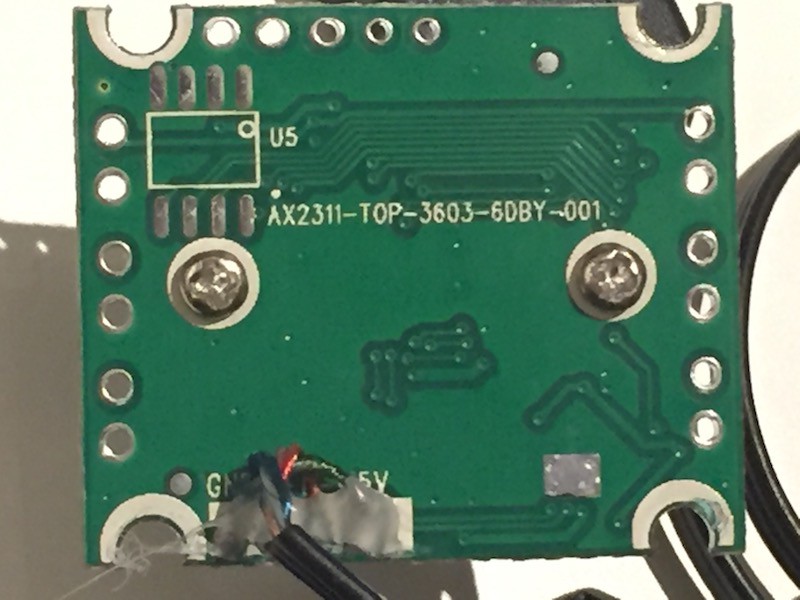
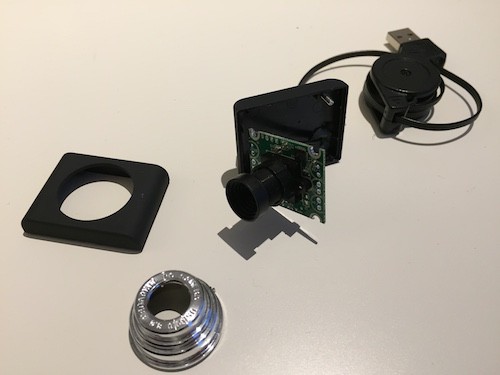
Low cost stereo camera
Building a cheap stereo camera using COTS parts
Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests







 Hans de Bruin
Hans de Bruin
 Brandon Langdon
Brandon Langdon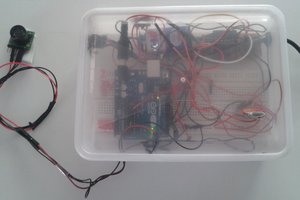
 Rishi Bhatnagar
Rishi Bhatnagar
 Ross Bochnek
Ross Bochnek
Oh amazing to see this idea I am also working on the similar type of project its a camera lens project you can see here https://cameraslife.com/