 Tom Meehan
Tom MeehanI've been trying to get a video of my
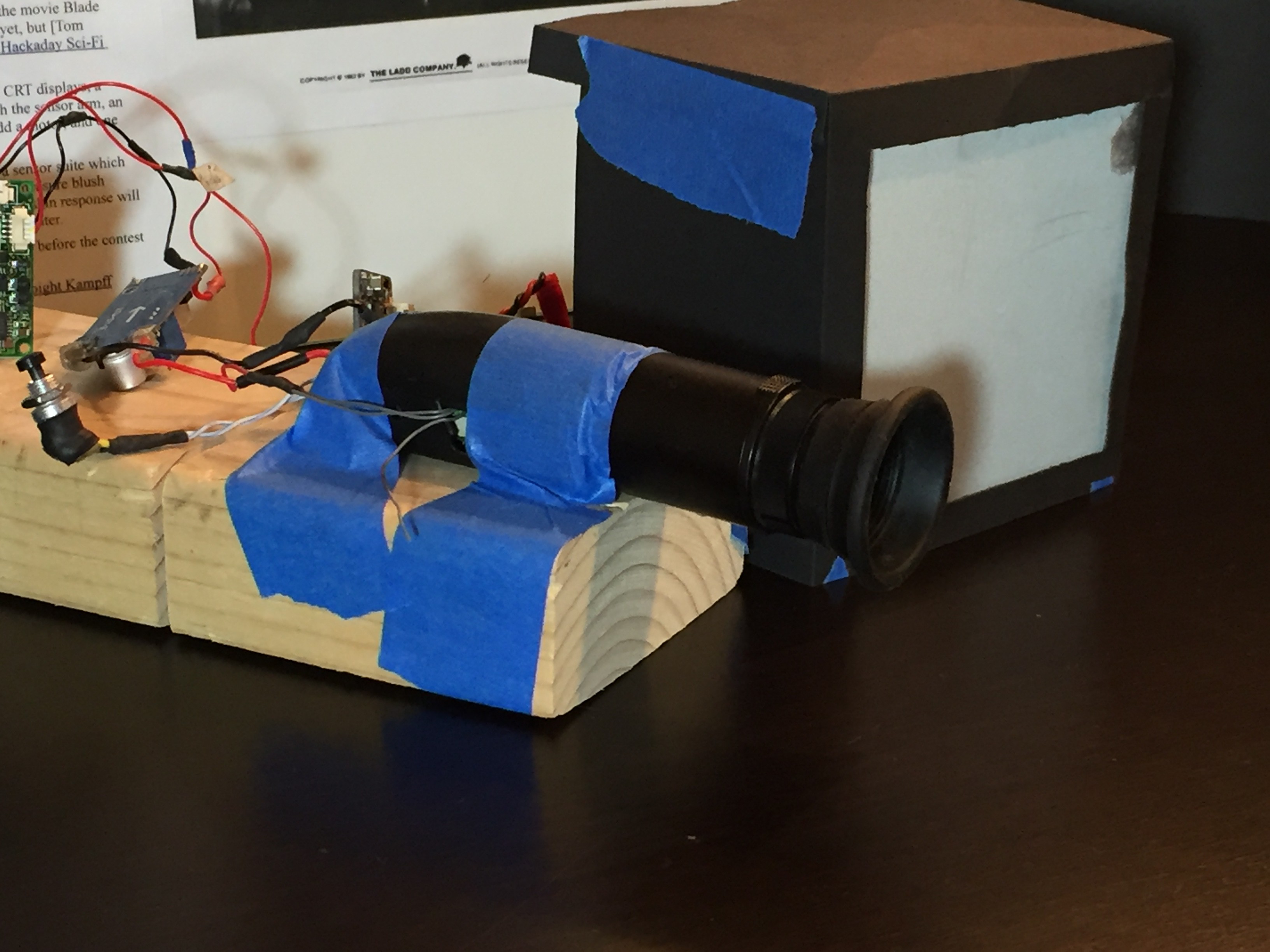
functioning Voight-Kampff “arm” filmed and posted for more than a
week now, finally I recorded it and now I can post it and here it is:
After re-writing my control code
multiple times I finally realized what I was doing wrong – I simply
needed to change my conditional statements from “if” to “while”.
An embarrassing mistake but all to easy to miss when I haven't had
anyone else look at my code (to easy to read “into” your own
writing – if I'd had someone else look at it they would have caught
it immediately – “palm to forehead” moment).
Here's the functioning code:
/*VK arm - lift, extend, rotate
* Serial communication used in initial debugging
* Goal - use signal from RPi to trigger the arm raise, extend and
* rotate sequence
* - endstops for safety and to signal extension and rotation limits
*/
//Arm Raise motor -Stepper motor driven by Pololu A4988 driver
int RaiseDir = 8; //dir pin - arduino pin to direction pin on Stepper Driver
int RaiseStep = 9; //step pin - arduino pin to step pin on Stepper Driver
#include <Servo.h>
//Servo's
// Arm Extension servo
Servo ExtServo; //Extends and retracts upper arm
int ExtStop = 3;
boolean ExtVal = true;
int ExtFor = 100; //adjust according to speed and weight
int ExtBack = 0;
int ExtHold = 90;
// "Eye" Rotation servo
Servo RotServo; //Rotates eye Up (forward) or Down (back)
int RotStop = 6;
boolean RotVal = true;
int RotUp = 100; //adjust according to speed and weight
int RotDown = 86;
int RotHold = 90;
void setup() {
ExtServo.attach(2); //470uF electrolytic cap- for motor start
ExtServo.write(ExtHold);
RotServo.attach(5); //470uF electrolytic cap- for motor start
RotServo.write(RotHold);
pinMode(RaiseDir, OUTPUT);
pinMode(RaiseStep, OUTPUT);
pinMode(ExtStop, INPUT_PULLUP);
pinMode(RotStop, INPUT_PULLUP);
Serial.begin(9600);
}
void loop() {
delay(1000); //Pause
Raise(); //Raise the arm
delay(1000); //Pause
Extend(); //Extend the arm
delay(1000); //Pause
Rotate(); //Rotate "Eye" forward
while(1);
}
void Raise() {
Serial.println("Raising Arm...");
digitalWrite(RaiseDir,LOW); // Set Dir high
for(int x = 0; x < 125; x++) {
digitalWrite(RaiseStep,HIGH); // Output high
delay(10); // Wait
digitalWrite(RaiseStep,LOW); // Output low
delay(10); // Wait
}
Serial.println("Arm Raised...");
return;
}
void Extend() {
ExtVal=digitalRead(ExtStop);
while (ExtVal == true) {
//Serial.println("Extending Arm.. ");
ExtServo.write(ExtFor);
ExtVal = digitalRead(ExtStop);
//Serial.print(ExtVal);
}
//Serial.println("Arm Extended..");
ExtServo.write(ExtHold);
return;
}
void Rotate() {
RotVal=digitalRead(RotStop);
while (RotVal == true) {
//Serial.println("Rotating Up..");
RotServo.write(RotUp);
RotVal = digitalRead(RotStop);
}
RotServo.write(RotHold);
//Serial.println("Eye In Position...");
return;
}Well anyway, it's fixed and working
correctly now. I do still need to add a “retract and store”
sequence but that is fairly simple now and will depend on the types
of end-stops I use to detect the positions of the different moving
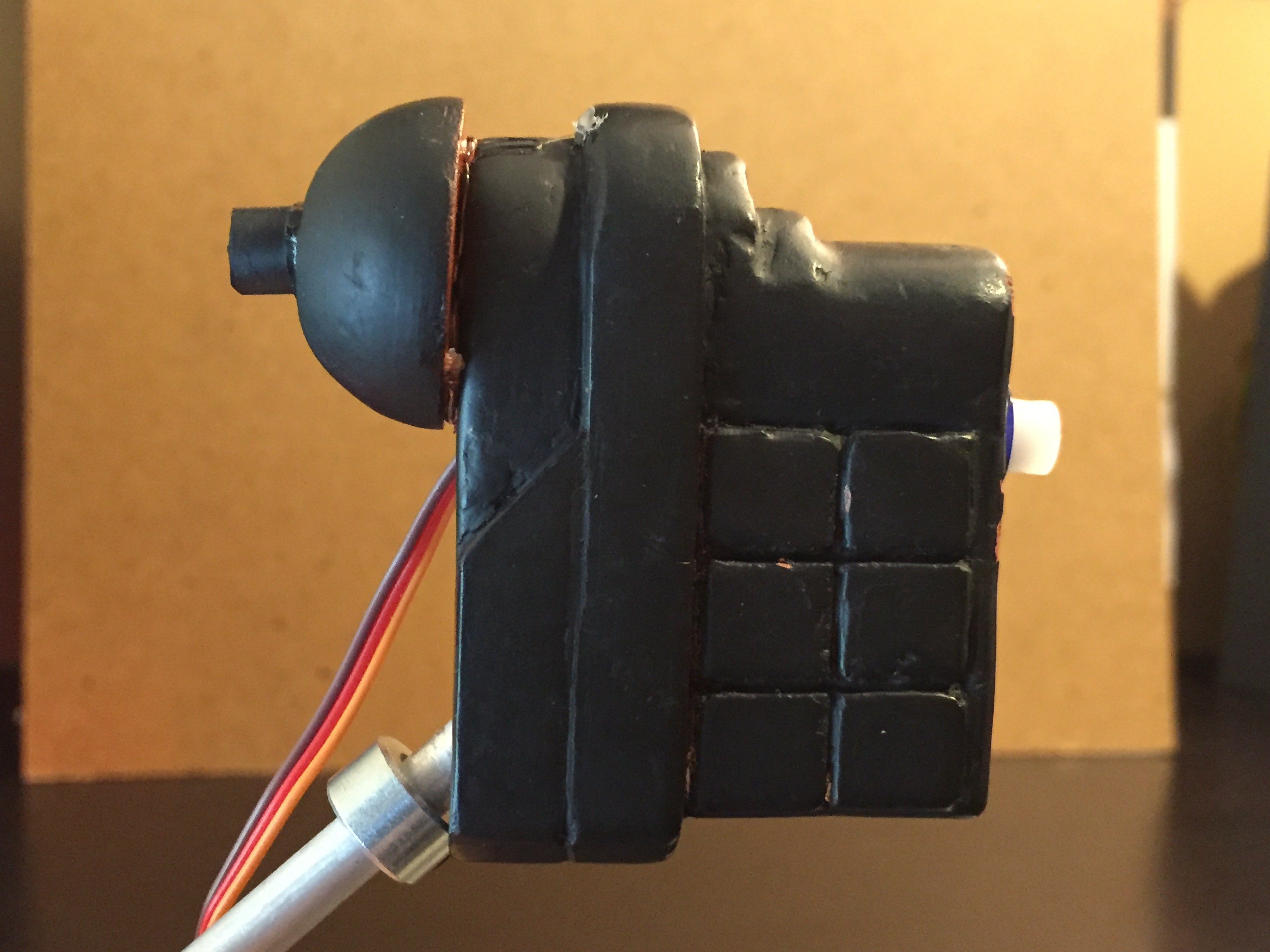
parts.I'm continuing to work on modeling, what I refer to as, the “eye” servo box. I haven't added all the details yet since I'm still trying to finalize the scale (in reference to the “shaver”). One attempt is visible in the current video (3D-printed the front half, filled lines with “Bondo Glazing and Spot Putty”, sanded, primed and painted black).
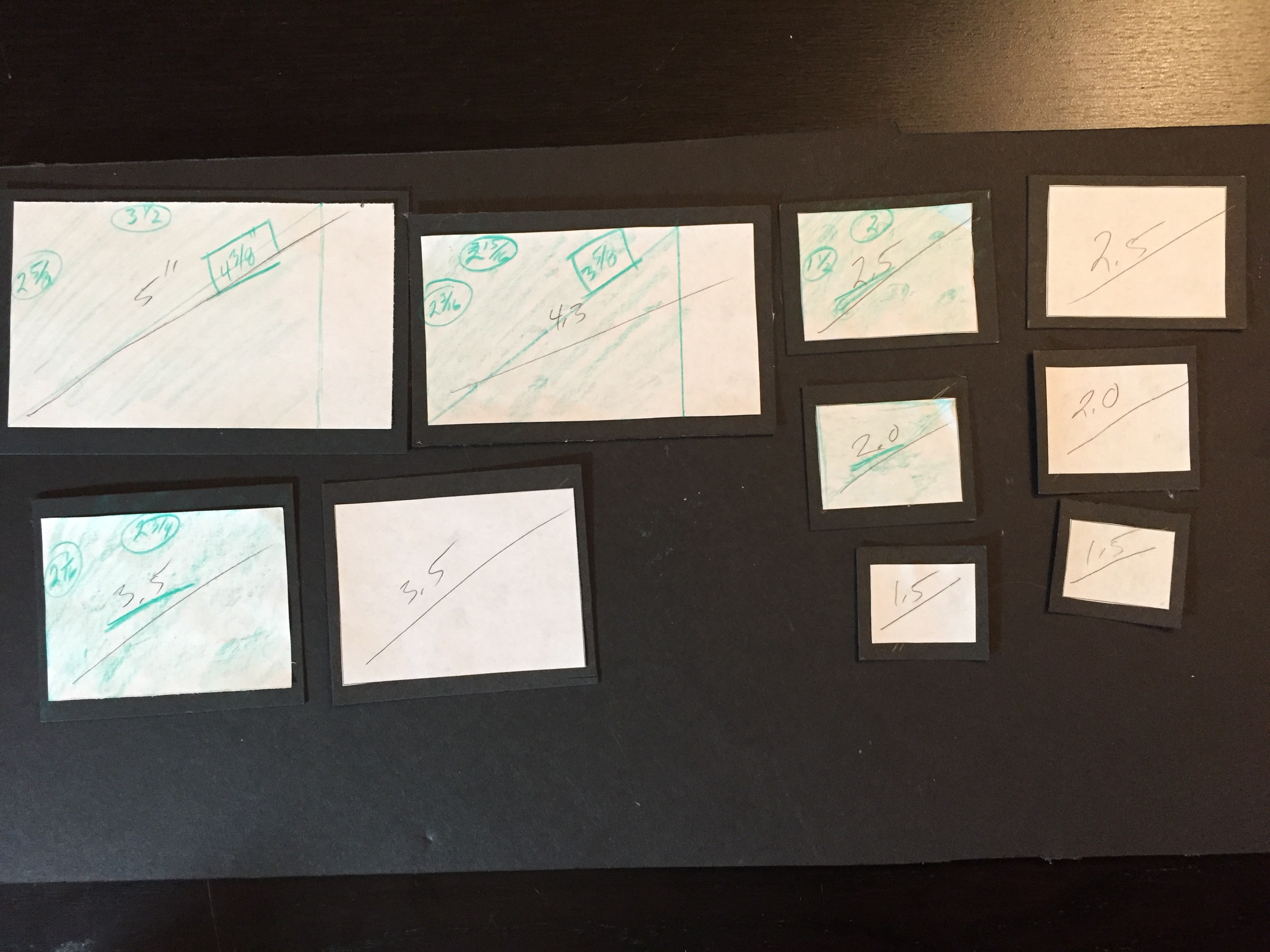
The screens on the VK are continuing to
give me headaches – I made cutouts of the different available LCD
screen sizes (that support “component input” and 4:3 aspect
ratio) just so that I could check out how they might work.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.