 Robin Reiter
Robin ReiterWell. Since we're hackers thats a job for us!
If you are interested you can watch the entire project log on YouTube.
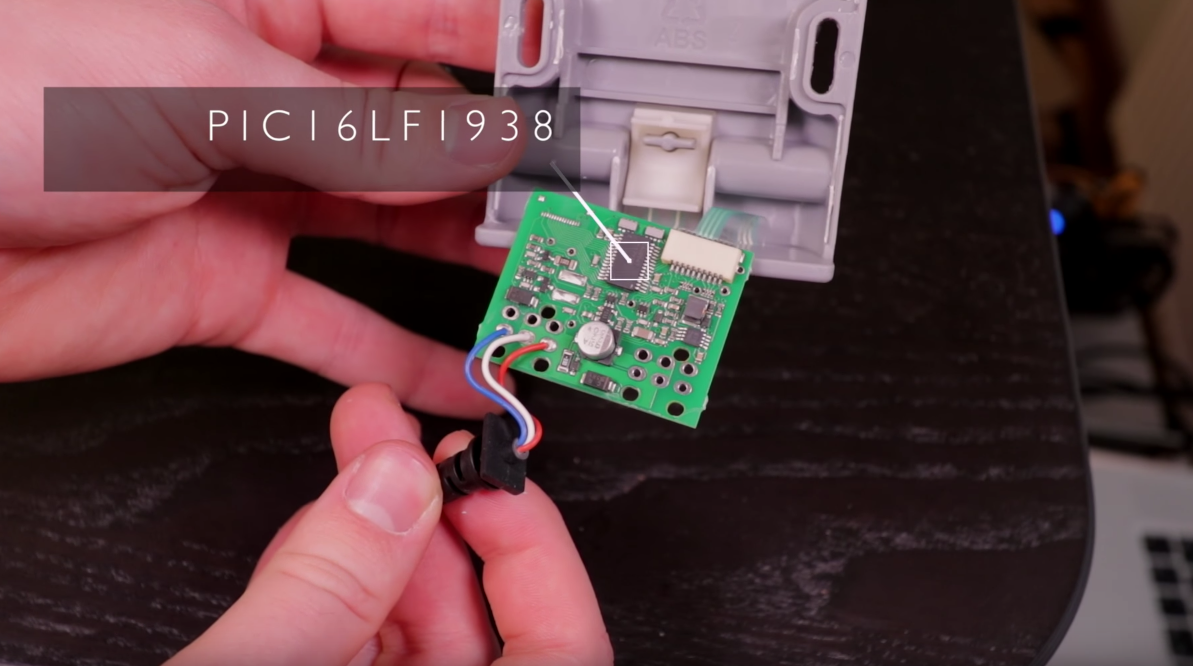
First I'd took a look inside the button housing. Thankfully they implemented some logic there that manages the movement. I found a PIC16LF1938 that handles basically everything in this table.
Apparently Robert Nixdorf already found out that the used the LIN protocol for communicating with the motors. However, after some oscilloscope and logic analyzer poking I've managed to demystify the data that gets sent so we can hook this guy up to an arduino.
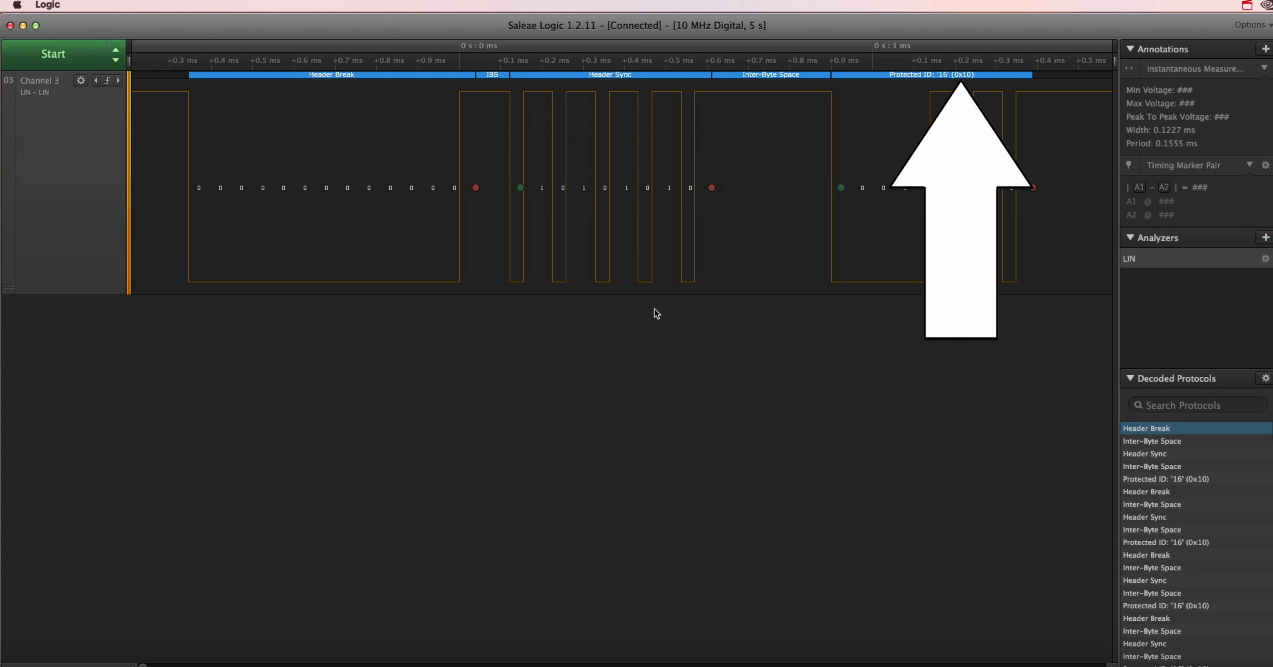
After writing some simple code to read the LIN stuff we now have the current table position. All the arduino does is either simulating a button up or down press depending on the current height target and position of the table.
The code and schematics are available on GitHub.
Happy hacking!





 jareklupinski
jareklupinski
 Drew Pilcher
Drew Pilcher
 Dangerpants Labs
Dangerpants Labs
 davish
davish
Hi, here is some documentation of another implementation of Robin's work.
https://robertaramar.wordpress.com/2017/03/09/hacking-an-office-desk/