0%
0%
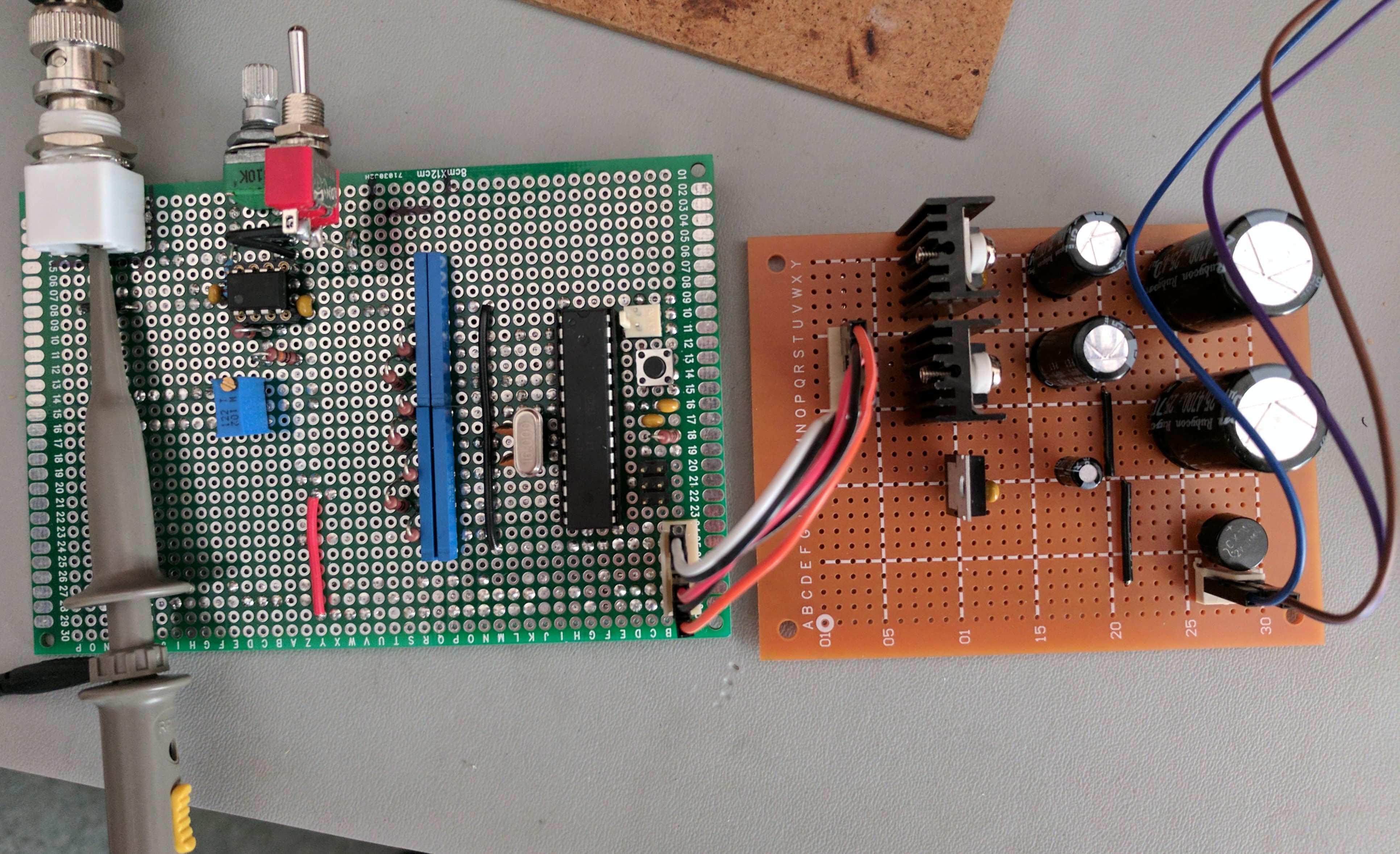
Funktion Generator
An AVR DDS function generator.
 Tim Savage
Tim SavageBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests


 Maso
Maso
 Richard Coleman
Richard Coleman
 Denis
Denis
 Peter Walsh
Peter Walsh
this project it's dead??? Too bad it seems a great project and very well documented