0%
0%
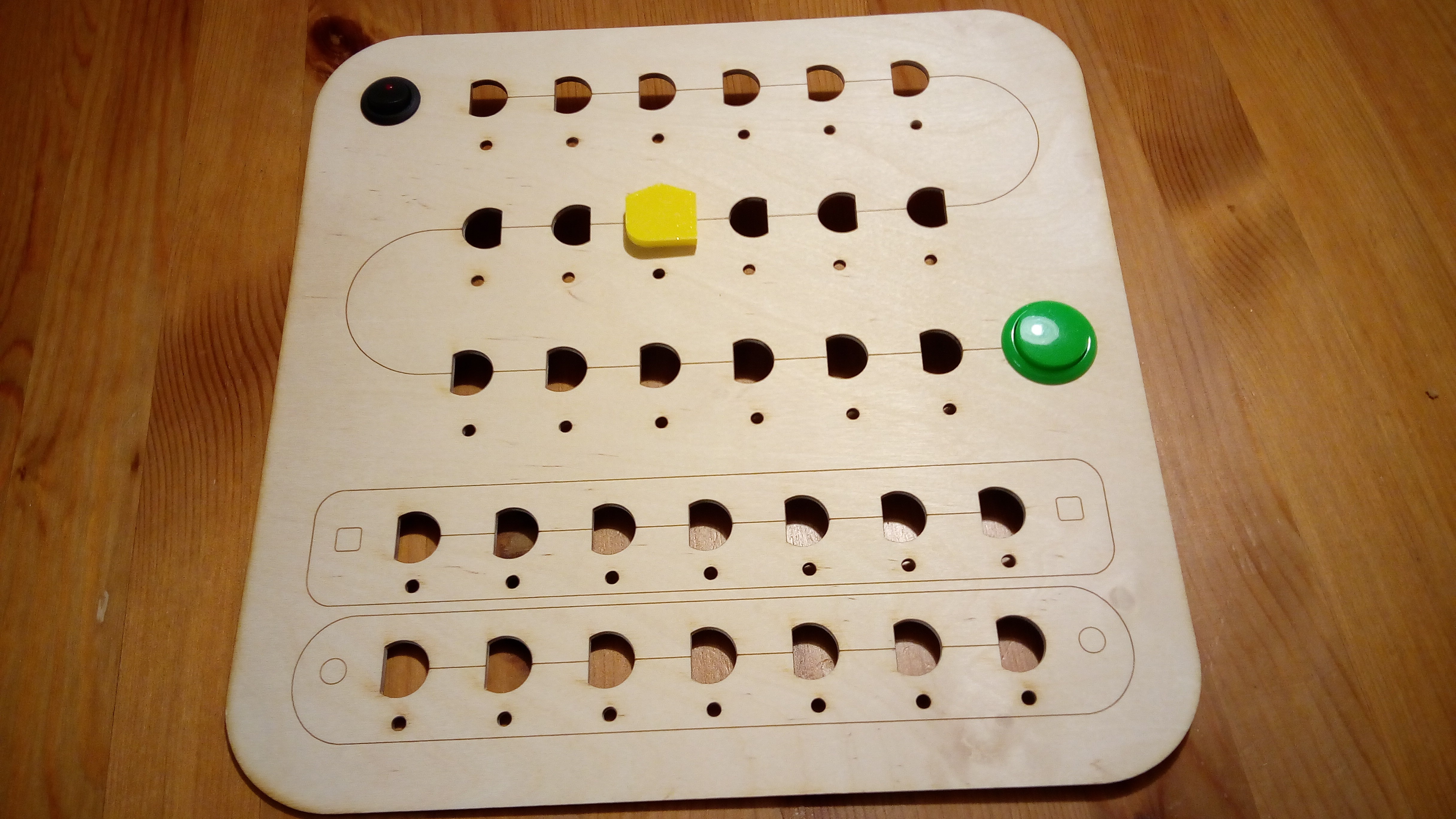
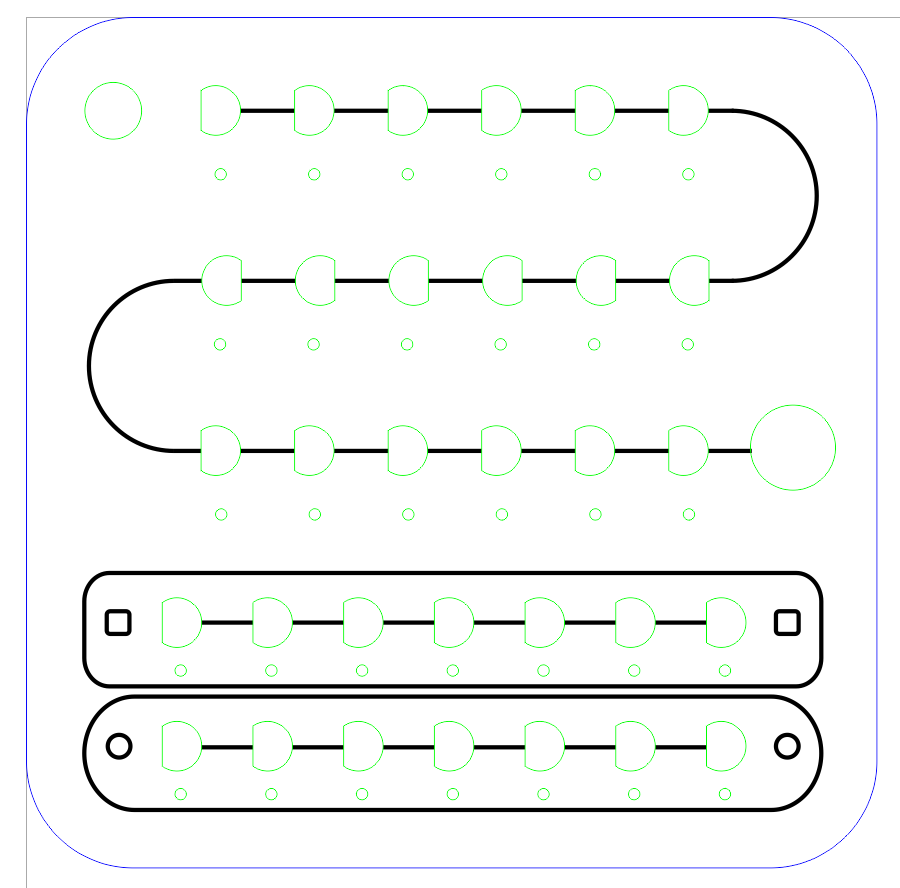
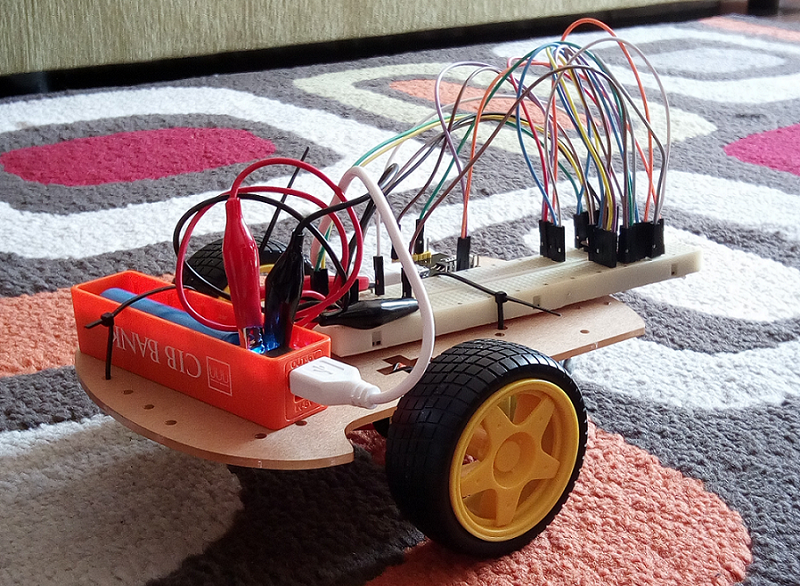
Cubetto Clone
I would like to build a re-engineered Cubetto clone for my son.
Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests




 Jorj Bauer
Jorj Bauer
 Christine
Christine
 Matthew Peverill
Matthew Peverill
 Bob Baddeley
Bob Baddeley
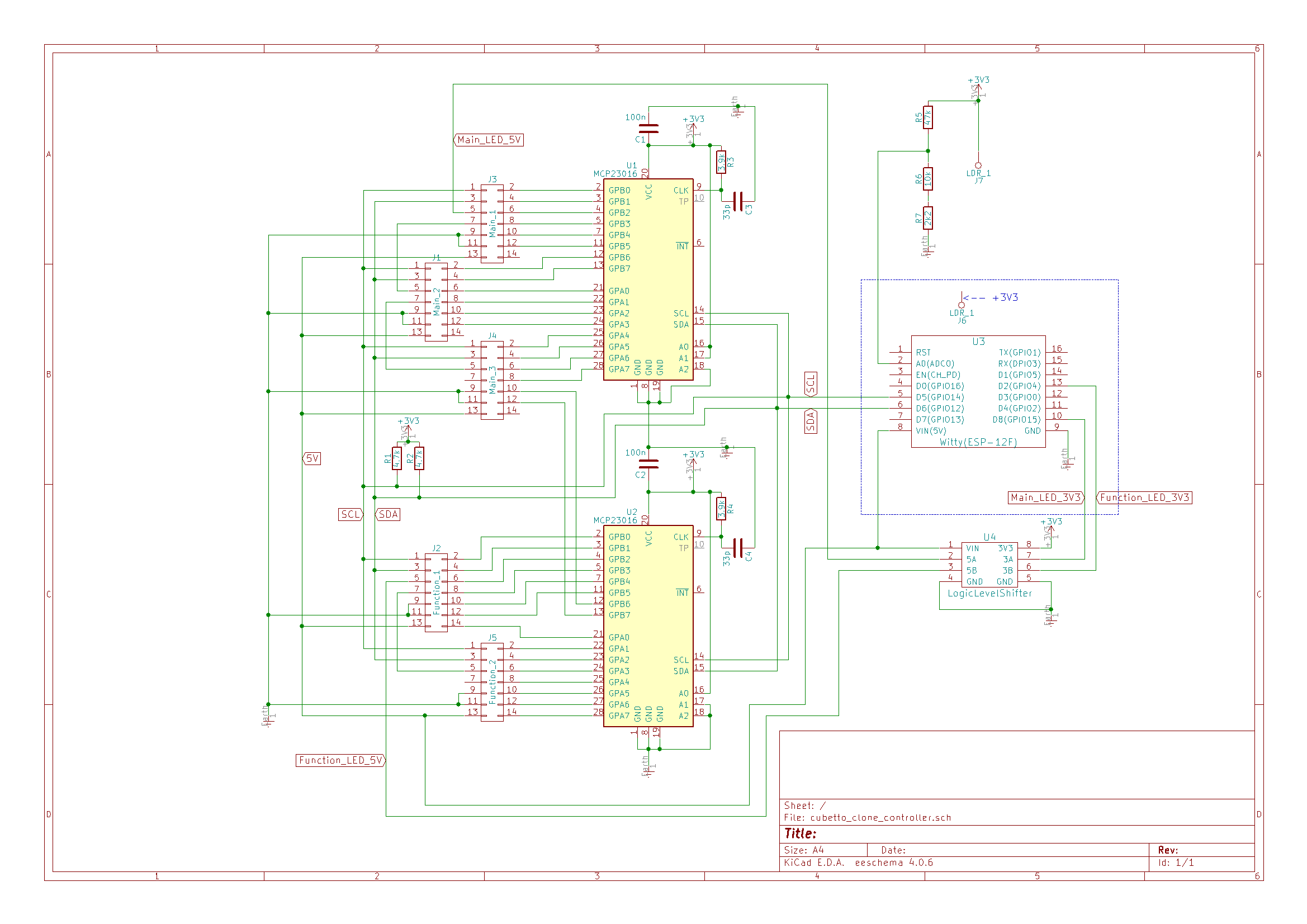
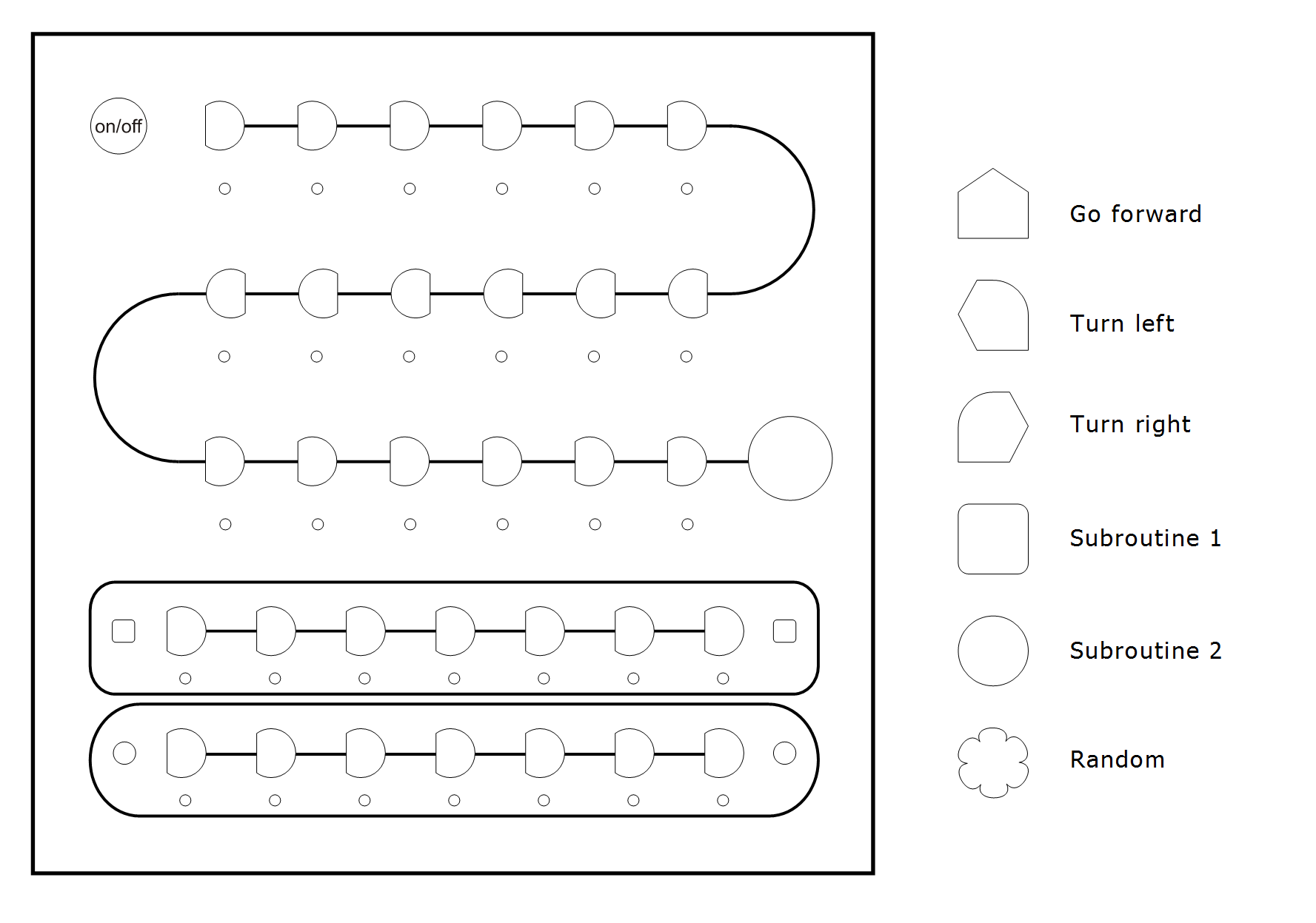
Check out the cubetto prototype github. they used resistors for the code blocks. https://emersonmello.github.io/prototype-documentation/