0%
0%
SWD-40: a 40% scale Special Weapons Dalek
Yes, I'm a sci-fi geek.
 Jorj Bauer
Jorj BauerBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests


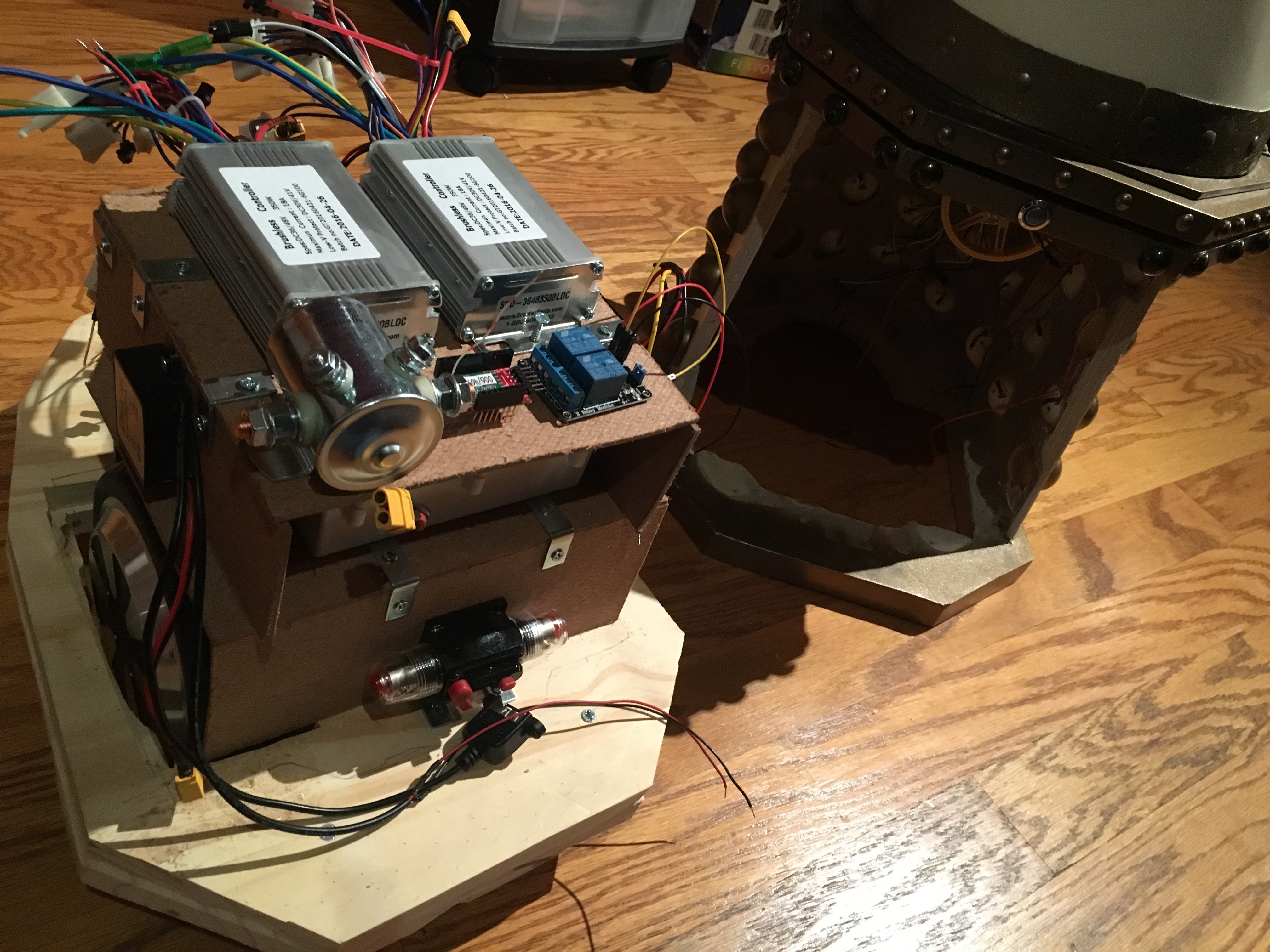
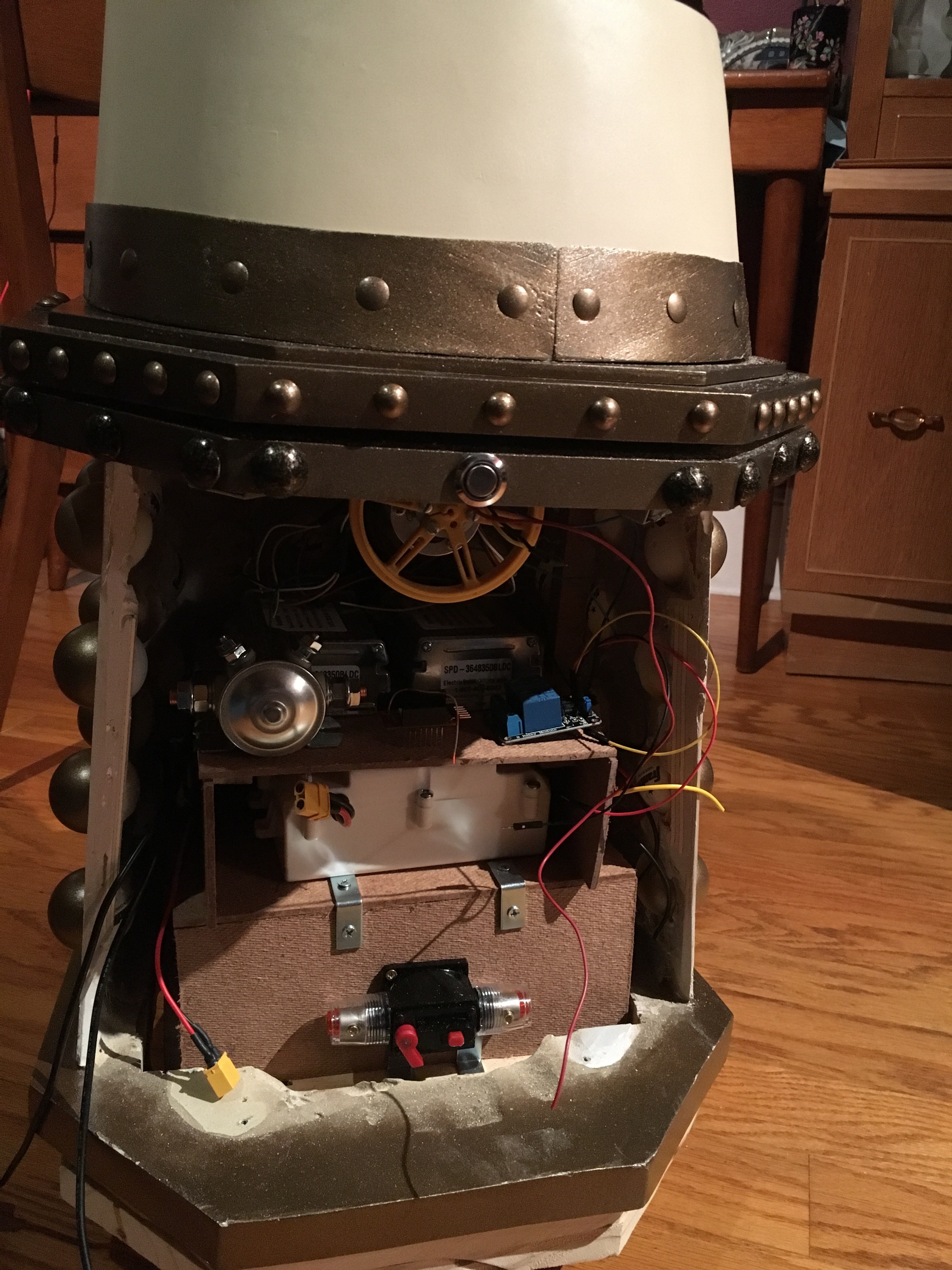
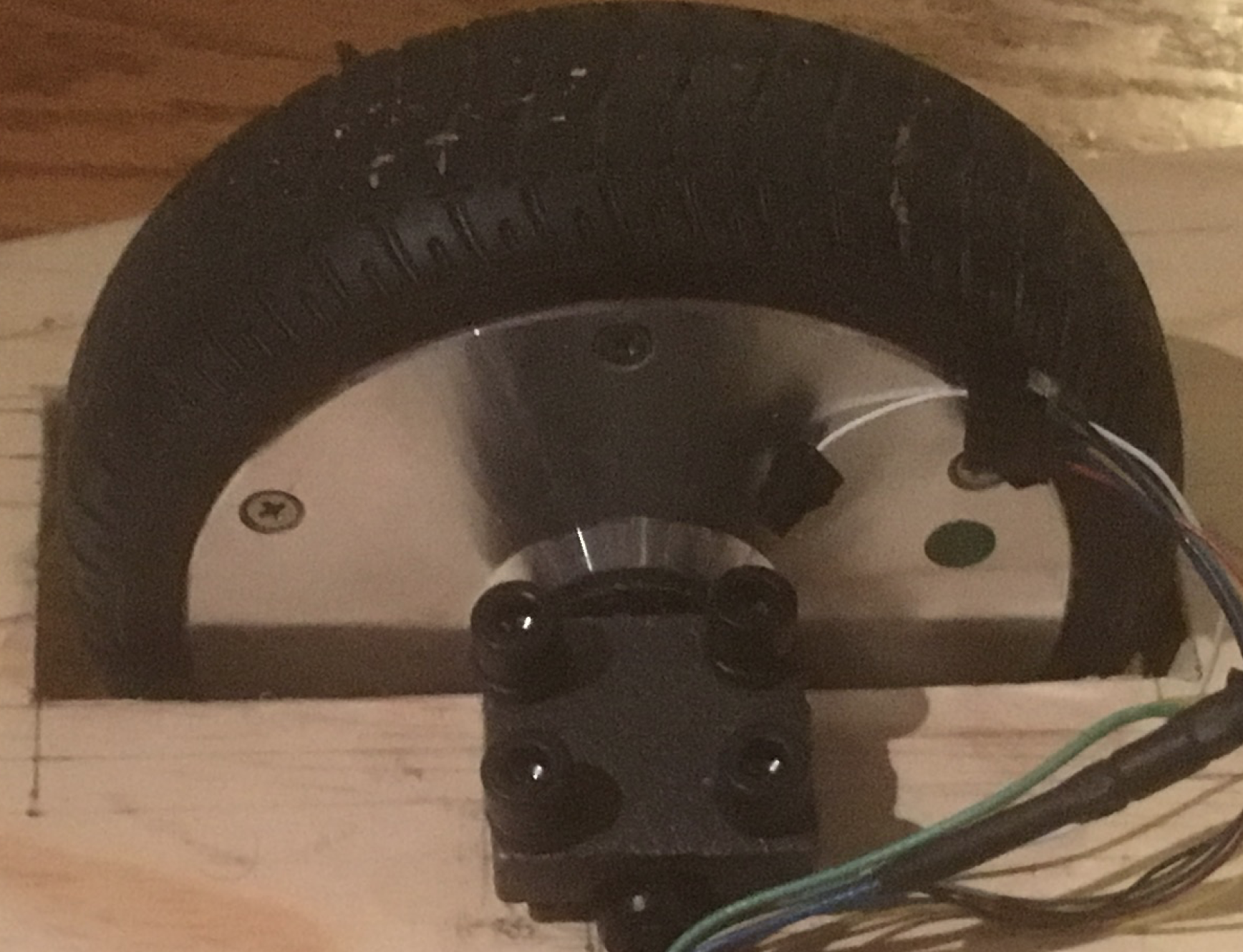


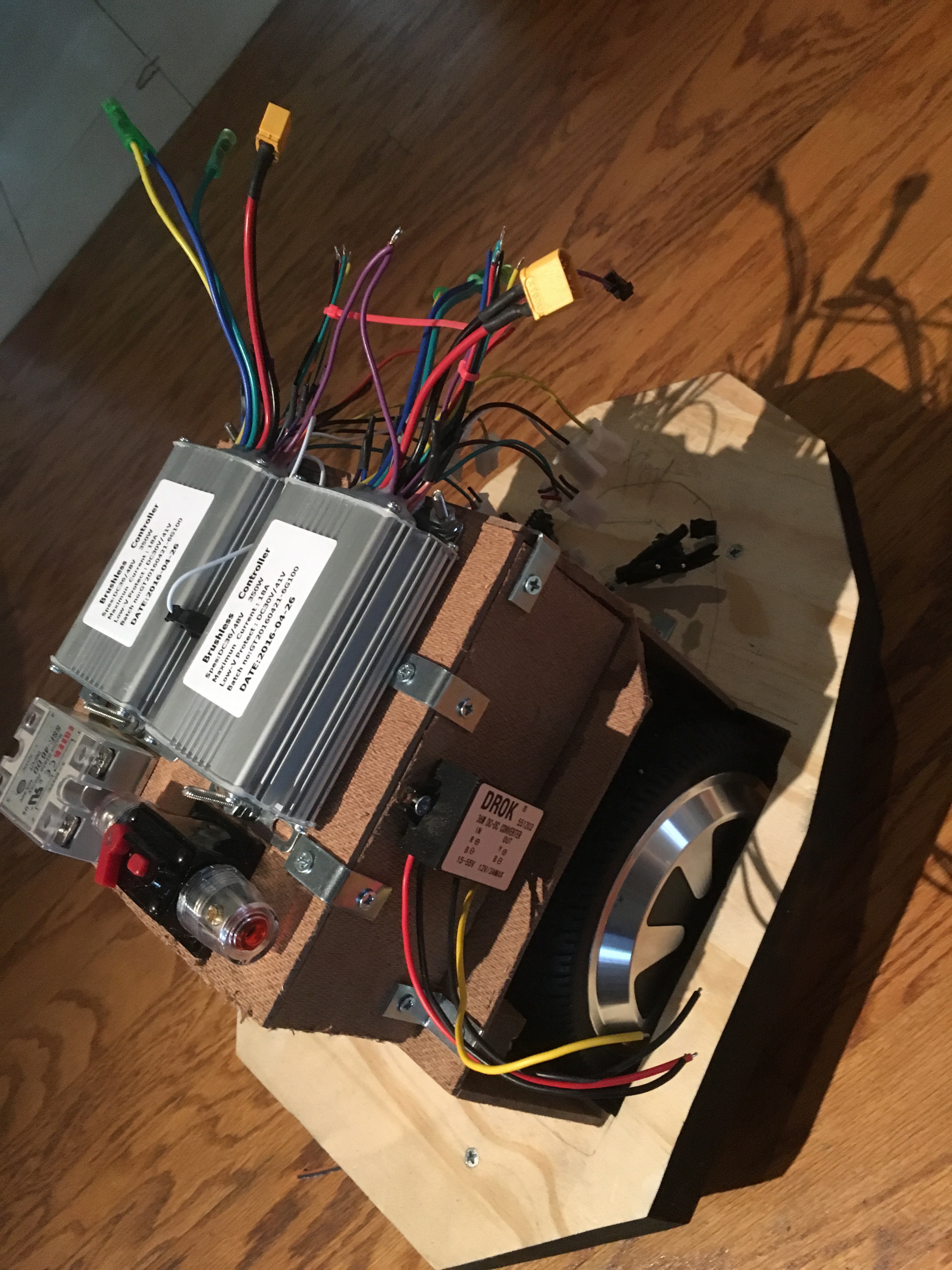
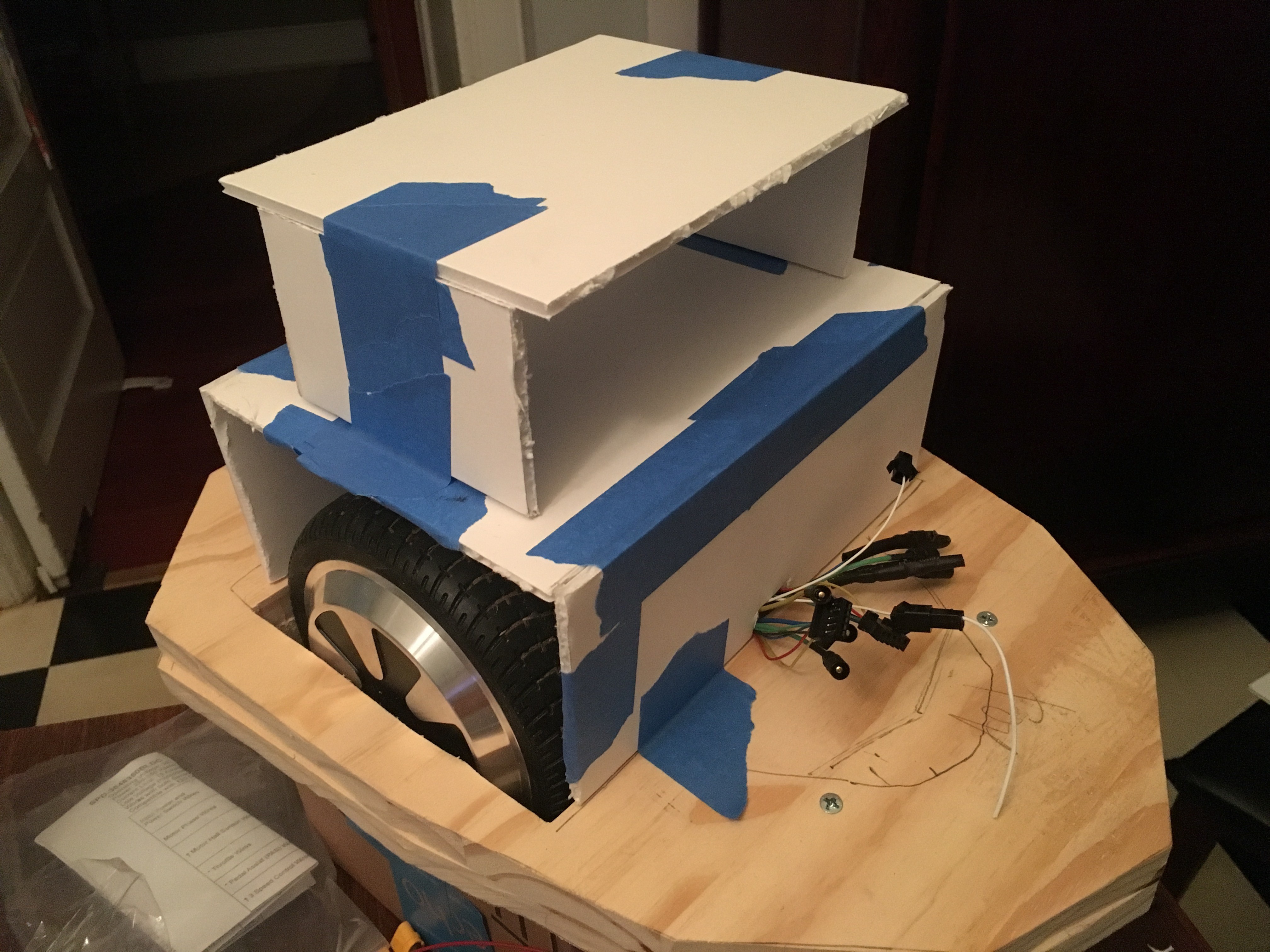



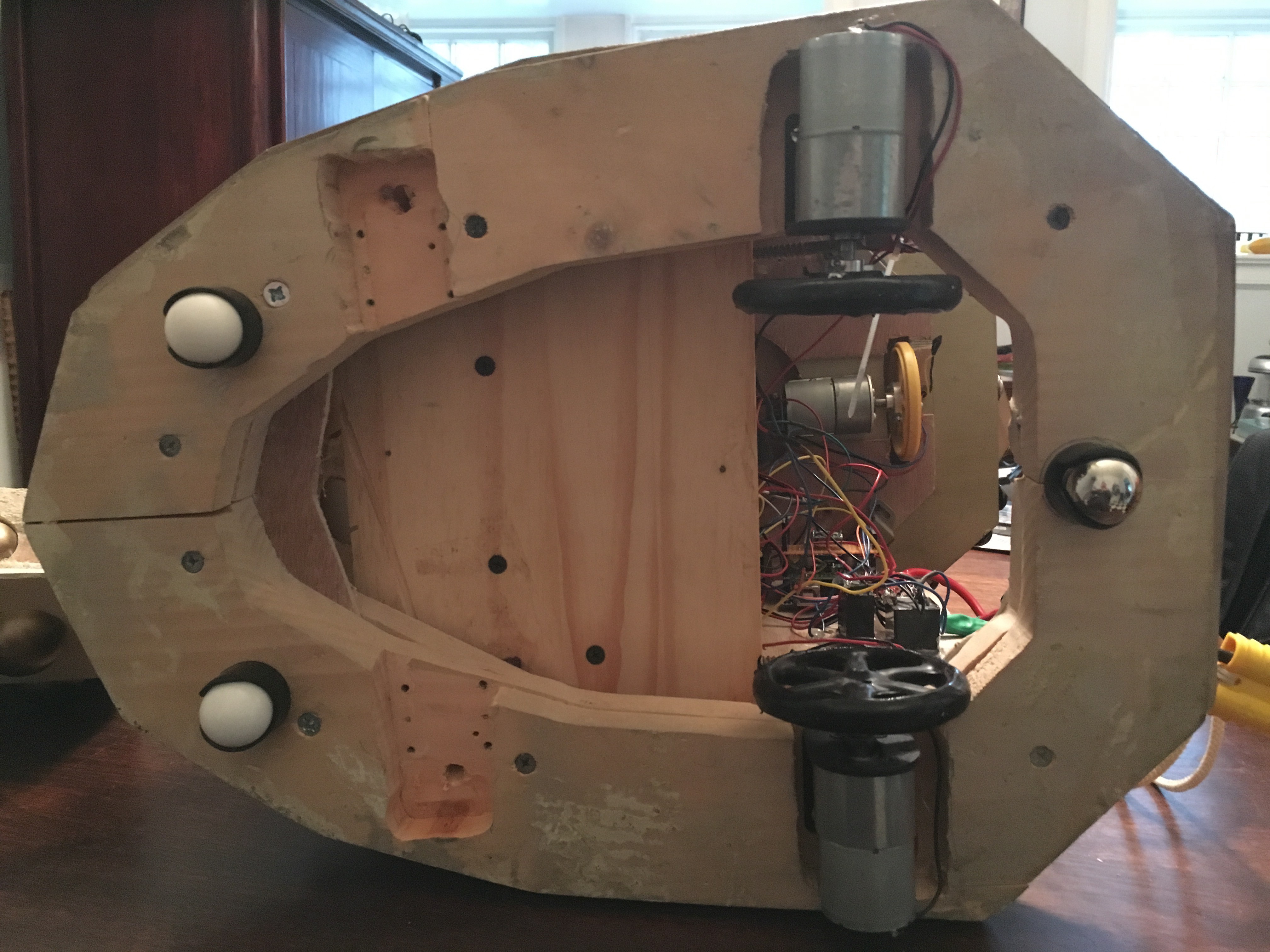 I mounted them that way because the wheels weren't deep enough to pass through the base, so I basically had to. Well, the new motors are HUGE by comparison, and I'm not entirely sure where they'll fit. So obviously the right answer is to guess, cut a bunch of bits off of the Dalek base, realize you need more clearance through the upper base plate too, take off the lower base plate, cut off more of the upper base plate, and then...
I mounted them that way because the wheels weren't deep enough to pass through the base, so I basically had to. Well, the new motors are HUGE by comparison, and I'm not entirely sure where they'll fit. So obviously the right answer is to guess, cut a bunch of bits off of the Dalek base, realize you need more clearance through the upper base plate too, take off the lower base plate, cut off more of the upper base plate, and then...

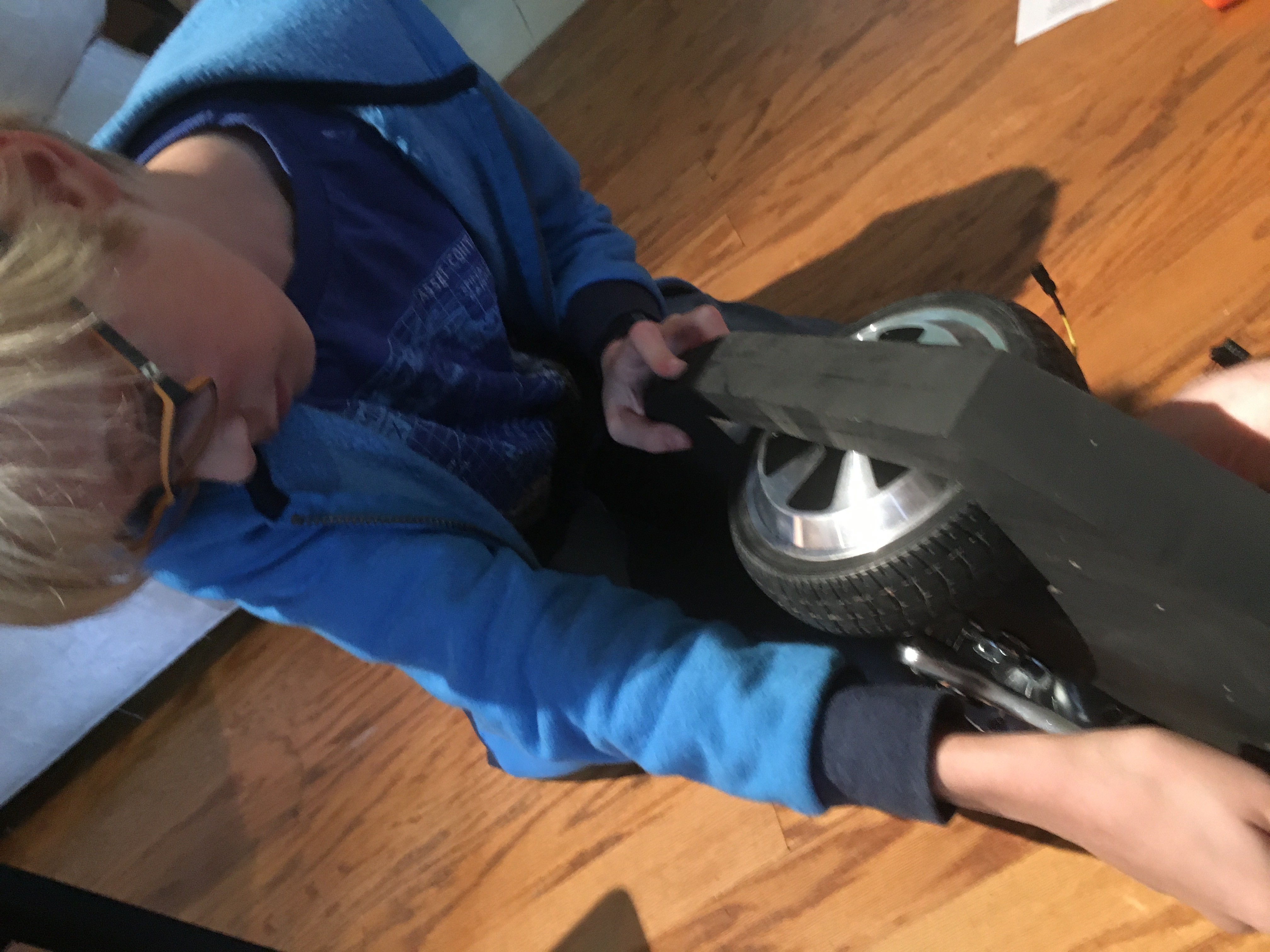
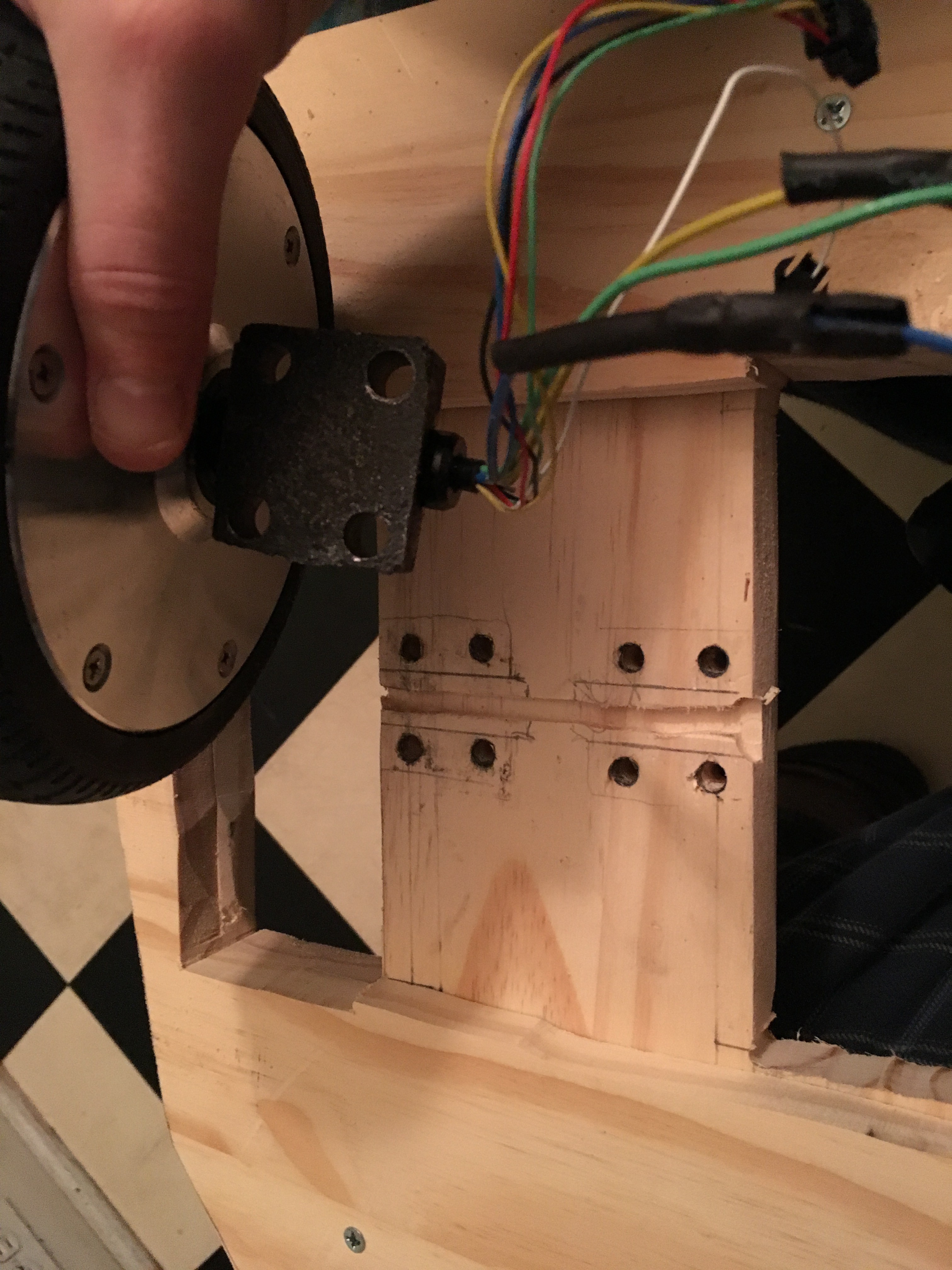
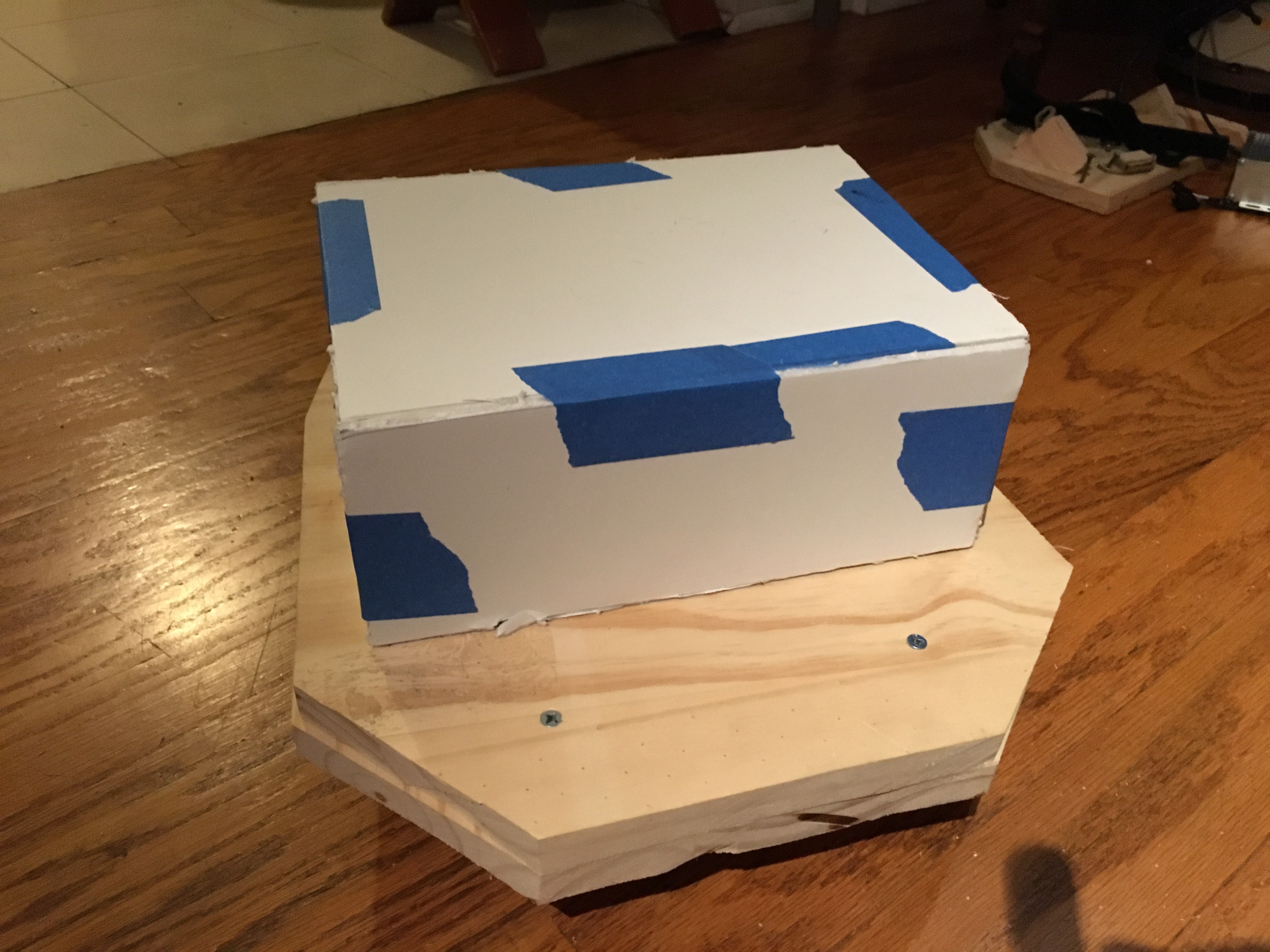
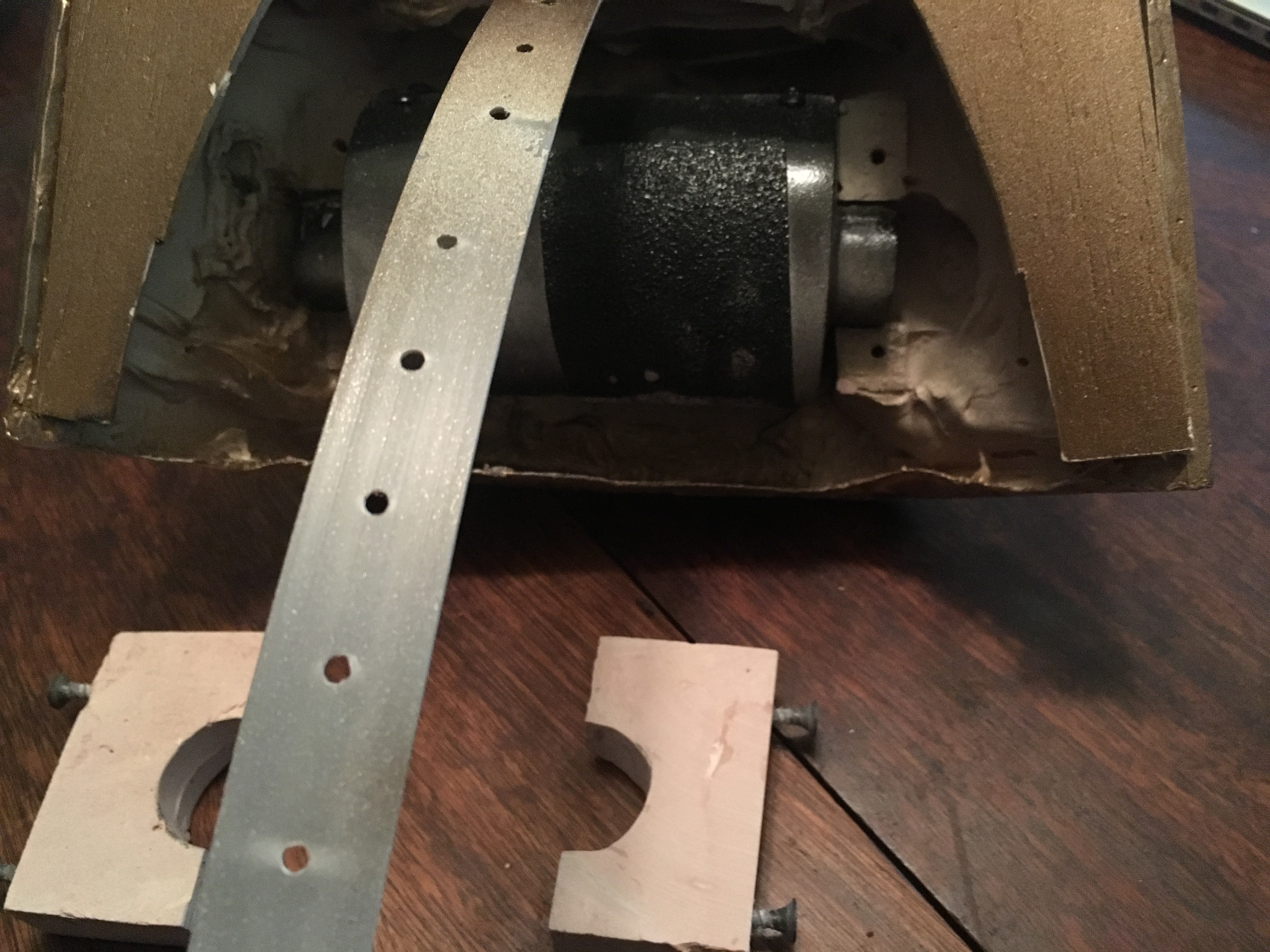
 Looks like it might just work! After marking out where the wheel posts sit, and using my router to cut a 1/4" deep notch right down the center (okay, *mostly* down the center, since I eyeballed it) - drilling pilot holes for the bolts at one size smaller than the bolts, and ... it should hold together well enough until I get some bolts and nuts to better connect them. Does it?
Looks like it might just work! After marking out where the wheel posts sit, and using my router to cut a 1/4" deep notch right down the center (okay, *mostly* down the center, since I eyeballed it) - drilling pilot holes for the bolts at one size smaller than the bolts, and ... it should hold together well enough until I get some bolts and nuts to better connect them. Does it?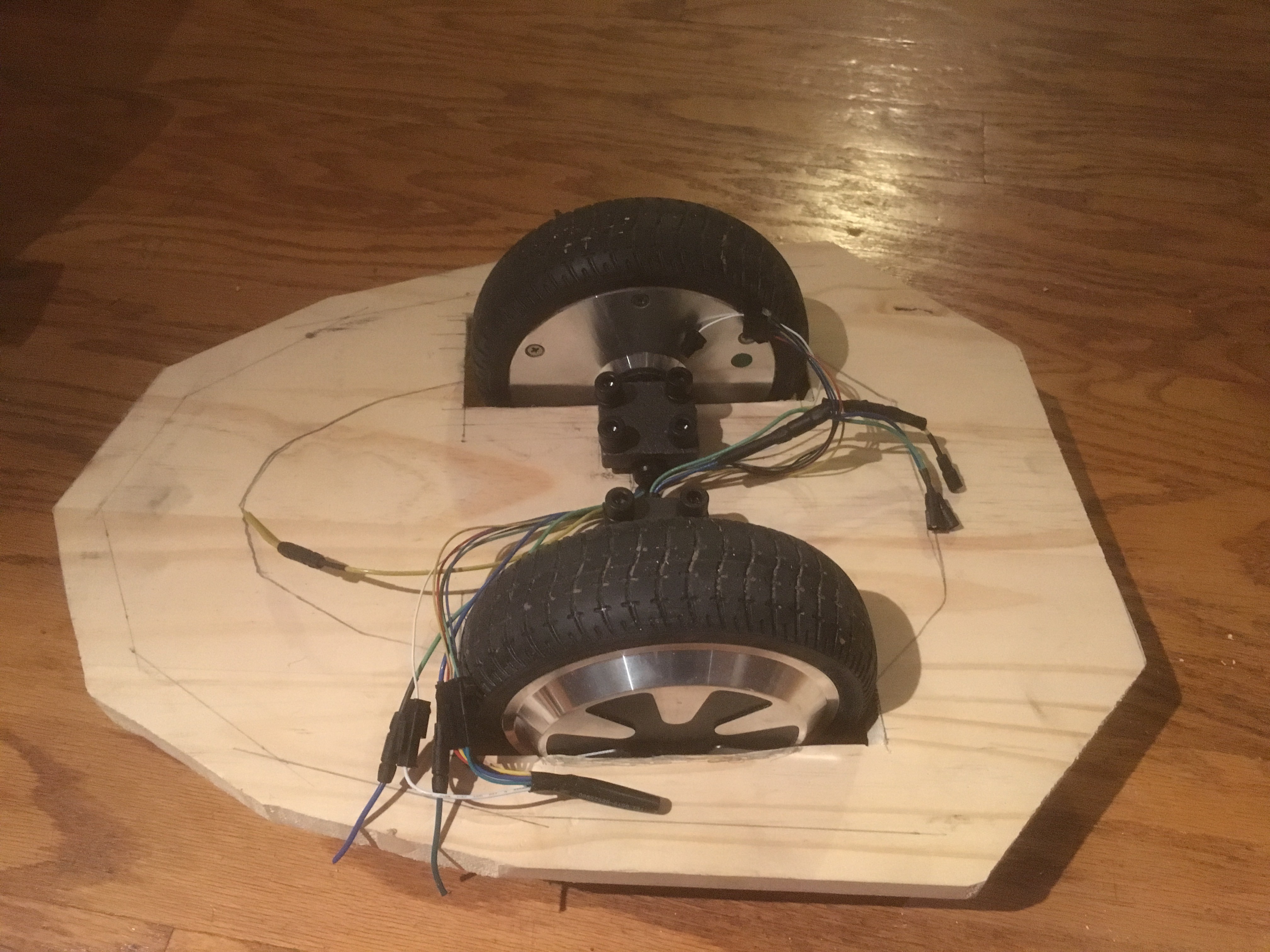









 Jim Heising
Jim Heising
 Steve
Steve

 ErikL
ErikL