Mars
Mars-
Continuing work on KittyOS
03/21/2019 at 21:17 • 0 commentsFor the March 2019 Retrochallenge, I am continuing to work in kittyOS. I accomplished a lot last time, and am adding more this month.
For full details, check my personal webpage http://mwsherman.com/rc2019/03/
The goal is to turn the CAT-644 into a 'real' computer. And what I mean by that, is eventually I want to be able to turn it on, open a text editor, write some source code, compile, and run it, without turning on my PC. To do this it needs a real operating system.
The Unix model is everything is a file. This has been copied to death. I am intentionally trying something different. Instead, everything is a device. A special device, a mux, lets a program select thru a collection of devices. The plan, is the sdcard filesystem, is just a tree of virtual muxes, eventually selecting virtual block or char devices containing data. You could call them directories or files. But you don't need a traditional filesystem to get started; The basic setup is a single mux containing a single device such as a serial port.
Hardware Drivers
The following is all working in the kittyOS hardware drivers. Not all is bound to the OS by syscalls, but the driver's work on their own:
- Graphics
- 248x240 64-color VGA graphics (with 640*480 timings)
- Text output w/ scrolling
- Sprite render
- smooth 1px horz/vertical wraparound scrolling, with 'invisible' region
- FAST (50% cpu) and SLOW (90% cpu) modes
- Serial
- Up to 115k baud
- SDCard
- recognize SD (not SDHC, SDXC) up to 2GB
- read/write block
- PS/2 Keyboard
- Audio is supported (and tested) by the hardware, but not yet implemented in kittyos
Implemented and Working:
- Device driver tree
- Mainmux device supporting:
- character devices
- PS/2 keyboard
- VGA console
- serial port
- SPI port
- planned: A 'file' is just a seekable chardevice accessible thru a tree of virtual muxes, stored on an sd card.
- block devices
- sdcard
- init
- read/write blocks
- sdcard is controlled as spi device thru spi driver
- sdcard
- mux devices (mux is a collection of devices)
- the mainmux is the device thru which all other devices are reachable
- muxes can switch other muxes
- character devices
- Mainmux device supporting:
- 16-bit virtual machine interpreter
- 16-bit accumulator-register machine
- fastest possible dispatch: One 16-bit reg-reg arithmetic instruction per 6 AVR cycles (Can this be beat? I've looked everywhere for a faster interpreter. I can do in 8-bit machine with 5 cycles, but many programs want 16-bit math anyway)
- Handle-based memory allocator with automatic swapping between AVR internal memory and external SRAM. (possible future support for disk-swapping or load-on-demand)
Planned:
- interpreter-accessible syscalls for handle access
- Swappable handles containing code
- Storing chardevices on sdcard mux (finally 'files')
- Syscalls for sprites
- Audio support (eventually)
- Graphics
-
Operating System (kittyOS)
09/04/2018 at 18:55 • 5 commentsI have started developing a 'proper' operating system for this computer. I am doing it for the 2018/09 Retrochallenge. http://mwsherman.com/rc2018/09/
Goals:
- Run native AVR programs in flash
- Run interpreted programs from SRAM
- Handle-based memory allocator: allow swapping memory from internal AVR memory to external memory
- Simple filesystem on SD card
Currently running in kittyOS:
- Hardware initialization
- Serial port as a 'char device'
- I/O devices abstracted: program running on the serial port could be switched to another device (if there was another device implemented to switch to!)
Existing code from the original cat1.c demo program: (to integrate in kittyOS)
- VGA driver (writable as char device for text; special calls for drawing sprites or pixels)
- SD Card driver (read/write linked lists of chained blocks)
- PS/2 keyboard driver (read only char device)
- Sound driver
Existing code run in simavr, but not tested on real hardware yet:
- 16-bit interpreter
- memory allocator ( can't use avr libc malloc, as I need allocation logic that knows about bitbang xram)
- task swapping
Todo List: not implemented anywhere yet
- filesystem directory (those linked list of disk blocks need a name... now you have a proper 'file')
- memory swapping (SRAM should just be a cache for XRAM structures)
-
Accumulator Machine Implementation
03/11/2017 at 21:11 • 3 commentsI've begun work on the virtual machine interpreter that will run on the Cat-644. I am writing it as a separate Atmel Studio project, as I could see this being useful outside of this.
The interpreter assumes that once it is invoked, it will never exit. Any interrupts already 'hooked up' to C functions will still operate normally. The interpreter can call out to single user-defined function called 'syscall.' Syscall is free to call out to other C functions, as the C stack will be available and left intact for this purpose.
simavr Windows Port (small side project)
I am mostly a Linux user. An exception to that rule is AVR development. I really like Atmel Studio's IDE, especially the AVR simulator in single-step mode. Every hardware peripheral is right there, clock by clock, in a nice graphical way. You can use gdb for this, but it is simply more convient to press the single-step key and watch port registers turn on and off. It was extremely useful for debugging the PS/2 keyboard and VGA signal code. What is not good about it is the lack of serial port support. You can watch a byte appear on the serial register, and you can poke 1 byte at a time into the register, but it is a pain to do so. This is where the simavr open source AVR simulator really shines. It has full serial port emulation, and on linux even gives you a pty you can attach a terminal to. When developing a bytecode interpreter, I want both: I want to single-step through code in Atmel Studio on Windows, especially when watching things like that stack frame and or studying the timings of different routines. And then, I want to run a program at full speed, and interact with it like it is on a serial port. What I needed was simavr on Windows. SImavr had mingw support, but I didn't want to set up mingw just for this, and I was curious what it would take to get it to run on Visual Studio. I got it working well enough for my current project: https://github.com/carangil/simavr-visualstudio
Small Interpreter
The goal is for the interpreter handlers of all of these instructions to fit within 256 instruction words on the AVR. This is because of the way I am fetching these instructions. All the instruction handlers fit on a single 256 word page of flash, so they all have the have MSB address. This is so the ZH register can be set up once. The instruction bytes themselves are directly loaded into the ZL register, and an IJMP is performed. At least all the entry points for all the instructions must fit in this page: If certain instructions are long, the handler can jump out another routine.
Registers
The virtual machine has 4 16-bit registers, labeled A, B, C and D.
Register 'A' is the special Accumulator register, and most instructions require its use. This is to keep the number of possible instruction encodings as small as possible. All instructions that don't have immediate data are 1 byte long, and instruction that need data are followed by 1 or 2 bytes.
There is a stack, managed by the 'Y' 16-bit index register of the AVR. This is separate from the C stack. This doesn't have to be, but this is the case at the moment.
Available Instructions
- LI (Load immediate) Can load an immediate 16-bit value into any register A,B,C,D
- Swap: Swap the contents of A with either B,C or D
- Arithmetic Instructions: Performs an operation between registers B,C,D and A, and stores result in the accumulator (register A)
- add
- sub
- subr (not yet implemented: performs reg-=A instead of A-=reg
- and
- or
- xor
- cmp Does a trial subtraction, but doesn't modify registers. Sets internal flags.
- adc: Add-with-carry, allowing 32-bit and higher math.
- Syscall The C function 'syscall' is called, with 2 16-bit arguments. The first argument is the contents of A, and the second argument is the contents of B. The return value of the C function is returned to the interpreted program in register A. The rest of the registers are unmodified. Complex, operating-system like operations will be done here, in native AVR code, as opposed to being code in the interpreter. This will include serial i/o, disk i/o, graphics routines, memory allocation, etc.
- Jump instructions (some of these implemented) All jumps are to relative addresses
- jmpr: jump to 16-bit address
- Accumulator value jumps: looks at value in register 'A', not the result of the last operation
- janz: jump if A is not zero
- jaz: jump if A is zero
- jan: jump if A is negative (if MSB bit set)
- Arithmetic comparison jumps: looks at the result of 'cmp, add, etc
- je: jump if values were equal
- jne: jump if value were not equal
- ja: jump if unsigned value in accumulator was larger than register (A > reg)
- jb: jump if unsigned value in accumulator was smaller than register (A < reg)
- Stack Instructions These can go under 'memory instructions', but are a little bit of a special case
- push reg : Push any register to the stack
- pop reg: pop any register into the stack
- pop <immediate> pop n items off the stack (items are discarded, not loaded anywhere)
- pick reg, <immediate> load the nth item on stack into any register
- put reg, <immediate> store any register into the nth position on the stack
- Memory Instructions I wanted to keep memory access simple: The other instructions don't access memory at all. I wasn't sure if it was going to be more common to store a register in a computed address (where the Accumulator is probably where the computed address ends up), or it was going to be more common to store the result of a computation (in the accumulator) to an address already contained in another register. I decided to support both cases. This results in 4 instructions:
- ld A, *reg (Load value pointed to by register A,B,C or D into A) (4 encodings)
- st *reg, A (Store value A to memory pointed to by B,C or D (3 encodings)
- ld reg, *A (Load value pointed to by A into B, C or D) (3 encodings)
- st *A, reg (Load value in B C or D to memory pointer to by A) (3 encodings)
- Subroutines I am undecided if the VM data stack should be used for this, or a separate stack instead. Forth has a separate stack, and it comes in handy to not have the return address in the way.
I feel like the above is a pretty comprehensive instruction set for the kind of machine I am making. I chose 16-bit instead of 8-bit, because for many of the operations, it only requires 1 additional clock cycle per instruction. Often on an 8-bit machine, two operations are cascaded to make 16-bit operations anyway. Basic arithmetic instructions complete one every 6 AVR clock cycles (20mhz avr = 3.3 million arithmetic instructions per second), and instructions involving data memory (push, pop, ld, st) take around 12 clock cycles. (1.6 million per second.) The cat-644 in fast mode (every other line on the display is dropped) runs at an effective rate of 10mhz, so divide the numbers above in half. When compared to a 1 Mhz 6502, which is often cited as 300 to 400 k instructions per second), I think this interpreter pulls ahead.
Next Steps
I need to finish some instruction handlers. I also need to write an assembler, since hand assembling bytecode is a little annoying. Also, every time I change a handler, the bytecodes change, because the bytecode is the offset into the interpreter code. I need an automated way to dump out the addresses of all the handlers, and use that to generate the bytecodes.
-
Accumulator Machine
02/04/2017 at 21:57 • 0 commentsAfter sitting down and playing around with syntax I think I've figured out what a programming language for an accumulator machine would look like. If you are familiar with FORTH or with RPN calculators, this makes a very good langauge to natively program a stack machine in:
C or BASIC: Z = X + Y FORTH: x @ y @ + z ! stack machine: push Xaddress // x load // @ push Yaddress //y load // @ add // + push Zaddress // z store //!
With the above snippet, forth and stack machine assembly langauge have a 1 to 1 correspondence, and the same is true for most forth expressions.
How do you generate code on a standard register machine? One way to do it, is to keep track of which register is the top of the stack as code is generated. Push a value? Put it in A. Push a second value? Put it in B. Add the top two values? A and B are the top, so add them, keep track of which one is on top. If you need more values than registers, you can spill to the stack, and still keep track:
FORTH | assembly | stack register allocation x | mov a, @x | a @ | ld a | a b y | mov b, @y | a b @ | ld b | a b z | mov c, @z | a b c @ | ld c | a b c w | mov d, @z | a b c d @ | ld d | a b c d | push a | (real stack) b c d k | mov a, 2k | (real stack) b c d a @ | ld a | (real stack) b c d a + | add d,a | (real stack) b c d + | add c,d | (real stack) b c + | add b,c | (real stack) b | pop a | a b + | add a,b | aIf you switch to an accumulator architecture, instead of operating on the top of the stack, the cpu operates on the accumulator, and whatever the top of the stack is. There are a few options to deal with this. First, the simplest is pretend you have a register machine, and as a post process, use swap instructions to put operands into the accumulator.
I wanted to look and see what a forth-like language that explicitly supported an accumulator would look like. I came up with a stack-accumulator abstraction. The above stack-register allocation scheme will be used with registers B,C,D, will spilling onto the hardware stack. All math operations will be between the accumulator, and the current top of the stack.
I added the symbol '%' to represent the accumulator. If '%' is prepended to a number or constant, it means that push operation puts the number in the accumulator instead of the stack. When doing this, the current value in the accumulator maybe stored in the stack.
%4 3 + // put 4 in accumulator 3 on stack, add accumulator and stackThe above %4, will overwrite whatever was in the accumulator. Sometimes you want to preserve what is in the accumulator to the stack:
%1 %%4 3 + + breaks down to: %1: put 1 in accumulator, overwriting whatever is there %%4: put 4 in accumulator. the '1' is displayed to the stack 3: put 3 on the stack +: adds accumulator (4) to top of stack (3) +: adds accumulator (7) to top of stack (1) giving 8, left in accumulator.There are a few other symbols needed:
@ : load address on top of stack to top of stack (same as forth)
%pop : move top of stack to accumulator
%@: load address in accumulator to accumulator
%%@: load address in accumulator to accumulator. the original address that was i the accumulator is preserved on the stack
dup: copy top of stack to top of stack
%dup: copy top of stack to accumulator
WIP, to be continued
-
Virtual Instruction Set Candidates
02/01/2017 at 07:32 • 2 commentsIt is time for me to write the virtual machine interpreter for this project. In a previous project log I once went over a fast instruction dispatch mechanism. I'll go over that briefly here: One goal was to have single-byte instructions. Reading 1 byte internal SRAM on the AVR takes 2 clocks. So, at a minimum we have this:
ld Reg, X //2 clocks, fetches 1 vm instructionThis loads a 1 byte instruction from where X is pointed. Remember, X is a 16-bit register made up of 2 8-bit registers. Using X as an instruction pointer for the VM has the advantage the there is special hardware to increment (even with carry) the 16-bit pointer at the same time we do the fetch. So, we have:
ld Reg, X+ //2 clocks, fetches 1 vm instruction, increments instruction pointer for next instructionNow, we need to decode the instruction to a handler. There are many ways to do this, one is a lookup table. I decided to have the instruction simply be the value of the lookup table by making all instruction handlers aligned to 256 words. This means if a handler is located at 0x1300, it is the handler for instruction 0x13. The handlers are small, so there is a lot of empty memory between handlers. This was going to be accepted as a trade off, and there was going to be a small number of instructions. If we use the Z register to hold the address of instruction handler, and we preload the low byte of Z (ZL) with zero (and never write to it again), we can now fetch/decode the instruction with:
ld ZH, X+ //2 clocks. fetches 1 vm instruction, increments instruction pointer for next instruction, Z is a pointer to the instruction handler ijmp (jump to address in Z) //2 clocks to jump to the handlerThe AVR has the instruction IJMP which jumps to whatever address is in 'Z'.
So what does a handler look like? Well, the handlers are short. Typical operations planned were things like 16-bit register add, with 2 operands. (Similar to x86):
handler for add A, B:
//AL and BL are #defines to some of AVR's registers add AL, BL //1 clock add low byte adc AH, BH //1 clock add high byte jmp fetch //jump back to the instruction fetcher (2 clocks)Of course 'jmp fetch' can be replaced with a copy of the instruction fetcher, so we don't waste 2 clocks jumping to the fetcher:
add AL, BL //1 clock add low byte adc AH, BH //1 clock add high byte ld ZH, X+ //2 clocks. fetches 1 vm instruction, increments instruction pointer for next instruction, Z is a pointer to the instruction handler ijmp (jump to address in Z) //2 clocks to jump to the handlerSo in 6 clocks we can do one basic 16-bit mathematical operation, and set-up for the next instruction handler. The only problem is this depends on the instruction handlers being laid out in memory in a very wasteful way.
Less waste.
After leaving this project alone for a while, I realized if the number if instructions is kept low enough, all the instruction handlers might fit into 1 'page' of 256 instructions. This means instead of locking ZL to zero, and changing ZH, I can lock ZH to some properly aligned area, and change ZL. How many handlers can I fit here? The above 16-bit math handler comes out to 4 instruction words. 256/4 = 64. This means I can fit 64 simple handlers here. In practice I expect to be able to handle more than 64 instructions, because I don't need all instructions to be quite so fast. Simple register-to-register math ops should be made fast. More complex instructions that already need more time to execute, such as division, i/o, etc, can have a simple 1-word 'stub' handler in the aligned section that jumps-out to a larger space. For these complex instructions, the aligned handler section of code will act more like a jump table. This jump takes 2 clocks to execute, but on a slow division operation, it would probably not be noticable. If I can't get all the needed instructions to fit, I could also make one of the instruction handlers a 'prefix code', switching ZH to a second page of instruction handlers. The slower or lesser-used instructions would be located here.
Instruction Set
I decided the VM running should be a 16-bit CPU instead of 8. The reason is if I apply the above handler strategy to 8-bit values, a simple 'add' handler takes 5 clocks. The 16-bit version takes 6 clocks. Often, the user will chain two 8-bit operations together into a 16 bit operation, so doing a 16-bit add in 6 clocks is better than doing two 8-bit adds at 5 clocks each. Most of the interpreter time is spend fetching the next instruction and jumping to the handler, so while I'm in the handler I may as well make the most of it and do 16-bit operations.
I also decided on a register machine. The reason is VM registers can be mapped to the many (32!) AVR registers. A stack machine means slow SRAM access: 4 clocks for each 16-bit value read or written. A simple 'add' operation of popping 2 values, adding, and pushing 1 value, would take 14 clocks. If you optimize by keeping the 'top of stack' in a register, you do better, but the stack is still icky to access.
I also don't need or want 'decodable' instructions. There isn't an opcode field, register field, etc like you would see on a lot of common instruction sets. The possible combinations of instructions are simply enumerated. There is a handler to add register B to A. There is another handler to add register C to A. The handlers are simply numbered, and they are numbered accordingly to where to handler is located in program memory. Obviously the actual binary values of all the instructions in the instruction set won't be known until all the handlers are written and in their final form.
First Proposal: Accumulator Architecture
I was originally going to go with a simple accumulator architecture. There would be 4 registers, A, B, C, and D. Any math operation could require that 'A' is the destination. 'A' is referred to as the accumulator. This is attractive because it dractically cuts down on the number of combinations. Instead of handlers for all of these cases:
add A,A
add A,B
add A,C
add A,D
add B,A
add B,B
add B,C
add B,D
add C,A
add C,B
add C,C
add C,D
add D,A
add D,B
add D,C
add D,D
There are simply only 3 cases: add one of the registers to 'A'
add A,B
add A,C
add A,D
Where did add A,A go? Don't need it: adding A to itself is the same as shifting left A by 1.
Other useless instructions:
xor A,A : clears A
and A,A : does nothing
or A,A: does nothing
sub A,A : clears A
So 3 handlers per basic math op. Add in a few more operations:
add, sub, and, or, xor, compare, swap, mov, movr (A is src instead of destination) (9)
9*3 = 27. 27 instructions and basic math is taken care of. Add in mul, div, mod, some load/store, push/pop, call, return, and jumps, and we have a pretty complete instruction set in a small number of actual opcodes.
Then I sat down and tried to figure out how to generate code for this thing. I tend to think in stack machines. Even if you take a langauge like 'C', you can break down expressions into a forth-like RPN notation that is very easy to compile for a stack machine. So, my problem is, given a list of operations in stack-machine order how do you apply this to an accumulator machine? I tried to some up with different scemes, and they all involved a lot of swapping variables around.
Rolling Accumulator
I came up with this as a compromise between an accumulator machine, and a general register machine. In this scheme, I allow any register to be a destination, but the second operand must be the register next to it. And it has to be in particular winding order. If there are 4 register, I have this:
A <- B -< C <- D <- (wraparound to A)
This makes it easy to generate stack-like code for it. This simple stack sequence like this:
push 5 push 3 add push 2 push 1 add xorwould turn into this:
mov a,5 mov b,3 add a,b mov b,2 mod c,1 add b,c xor a,bI end up with a stack machine that has a hardware depth of '4'. The stack pointer is implicit: There is no pointer, the person or compiler creating the code keeps track of the stack depth. If more than '4' is needed, the registers can be spilled onto the real stack.
This also means, because there is no dedicated accumulator, we need 4 possible instructions per math operation:
add a,b
add b,c
add c,d
add d,a
This does reduce the number of operations that can be supported, beacuse, remember, I can only have 64 simple handlers in the table.
Right now I am writing an emulator in C on my PC for this type of instruction set, to see what I really need. One idea, is getting rid of a register and only having 3. This aligns well to the FORTH keywords dup, over, swap, rot, which operate on the top 3 stack items. PICK is used for items under that. The burden is on the compiler to create reg/reg operations tracking the top 3 stack items, but all items under that are placed in the real stack and will be accessible by a pick-like instruction. The advantage over the accumulator machine is a stack paradigm language, such as forth or RPN can easily generate code for this. I call it the rolling accumulator, because as you evaluate expressions, the register that represents the current 'accumulated' value rolls around the ring of adjacent registers.
That's all for now. If anyone is reading I'm interested in hearing your thoughts on if the rolling accumulator has any advantages.
Another thing I am pondering: what would an accumulator oriented language look like? My only complaint for an accumulator machine is generating code from a stack-language is awkward. Suppose during evaluation of an expression, you need to evaluate a sub-expression? You need to put the current result somewhere, evaluate the sub-expression in the accumulator, and then go back to what you were doing. What does that look like as a language?
-
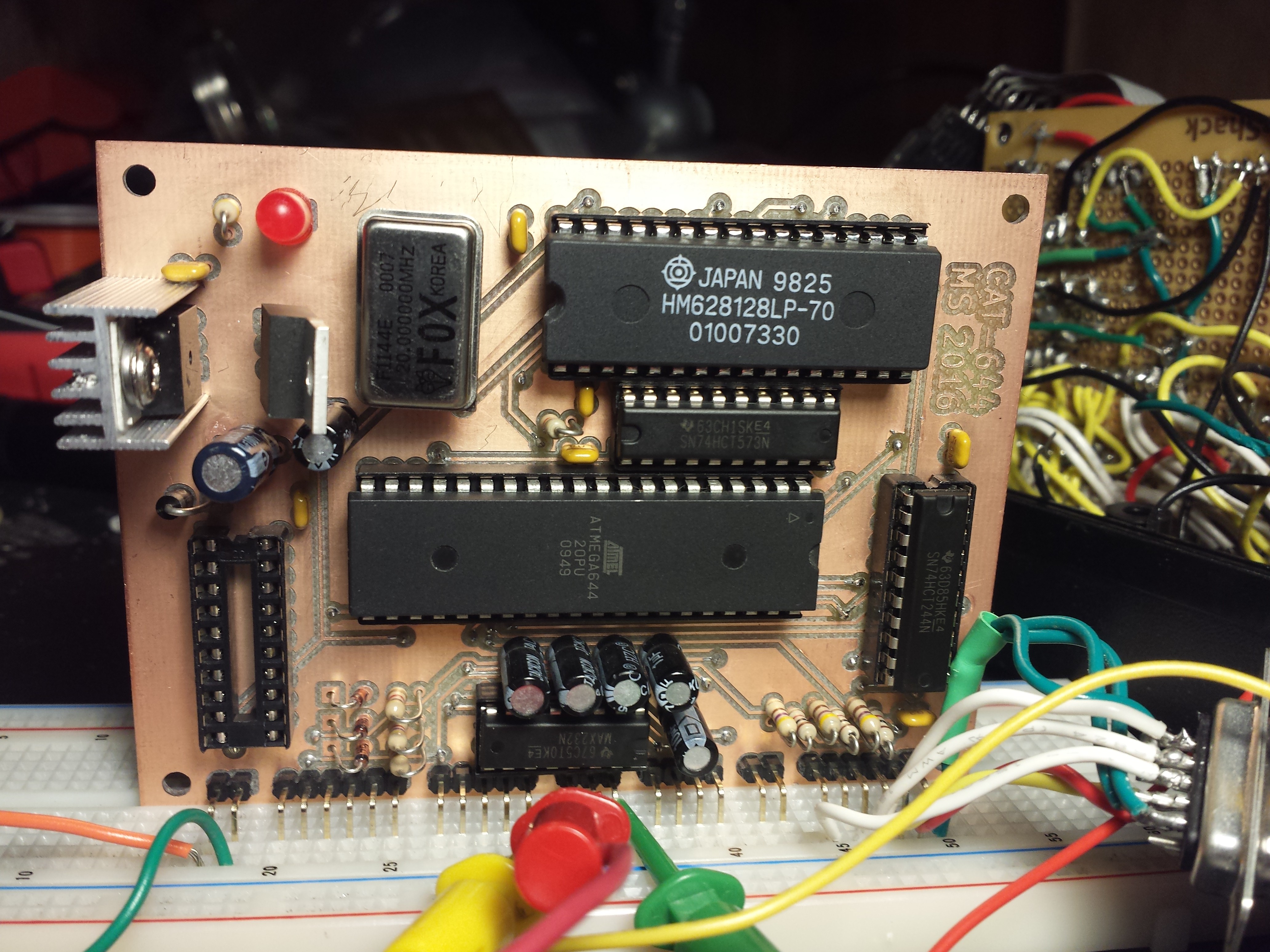
Cat-644 Ser No. 3
11/24/2016 at 21:12 • 0 commentsKevin made me a second board with a few improvements. Counting my original prototype, this is the 3rd copy of this computer.
The 3.3V regulator has an extra pad that can now accept both styles of regulators: 78xx series AND 1117 series LDOs. The too-close traces were moved. And row of header pins were added for all the (only 3) unused PORTA lines. Now every pin out of the microprocessor is easily accessible. Some pins, like the data and address lines are not explicitly brought out of the board, but just about every pin goes through a via at some point, so there are many places to cleanly solder a wire and grab a signal. (Clean... as opposed to tacking-on jumpers on the bottoms of all the ICs: putting a wire throgh a hole is much more sturdy.)
I tin-plated my board, and I chose to use machined sockets, gold plated in the ones the local shop had in stock. My 20-pin sockets for the 74xxx logic chips have integrated bypass capacitors, so I left most of the bypass capacitor spaces blank.
I discovered the the .1uf capacitor I originally had on the VSYNC VGA line is not necessary, at least with my current monitor, on this board.
I am also making another change in the name of code optimization: I am switching the HSYNC and VSYNC signals. I don't need to change the board, just how the connector is wired up. (If someone discovers the .1uF vsync capacitor is necessary, one will have to be tacked-on somewhere, but you could do this in the wire harness itself if you wanted to.)
Why am I switching these signals? The video interrupt is generated by Timer#1, and it has two channels, A and B. The timer is set to free-run to Channel A's value and reset to 0 when it reaches 636 (the number of clock cycles it takes between lines of video). When it resets, it also calls the video interrupt code.
In my original version of the code the interrupt 'manually' pulled hsync low, first thing after the C interrupt 'header' code. After a while, I noticed that by chance Channel A's output pin happens to be the HSYNC line, so instead, I have it set up to pull sync low when the counter resets. Now when the interrupt starts, HSYNC had already been low for a few clocks. But now I want to push the HSYNC signal further into the past: I want the hsync to have been low for almost it's full duration before the interrupt even starts. First thing, I want the interrupt to pull hsync high, and then start outputting video as soon as possible. To do this, I need to use Channel B.
Channel B can be set to pull the pins up and down at different time values than the reset value which Channel A is using. (I can't switch channel A and channel B behavior, as only channel A has the hardware to reset the counter and fire the interrupt: Channel B can only poke an IO pin on and off.)
Channel B happens, by chance, to be the line I am using for VSYNC. So if I swap HSYNC and SYNC lines, I can now program the AVR's timer hardware to pull HSYNC low or high at a different part of the cycle than the start interrupt code.
I have already swapped these pins on my connectors, and verified that the newly placed hsync pulse has horizontally shifted my display. Today is Thanksgiving, so I will probably stop for the day, but maybe this weekend I can finish the revised VGA driver.
![]()
-
Real Board!
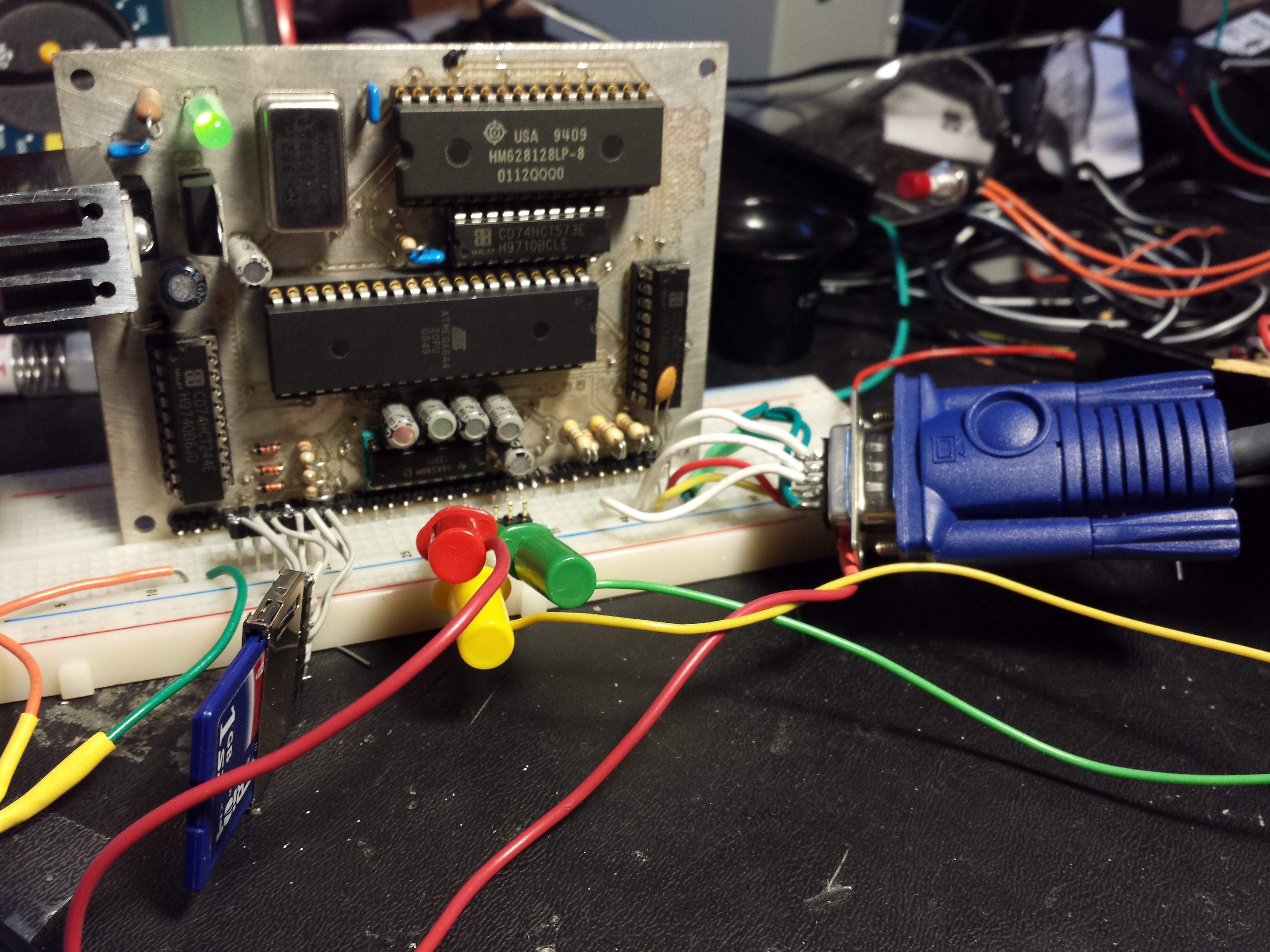
11/16/2016 at 06:00 • 1 commentA coworker named Kevin recently started making homemade PC boards with a mill, and was going around the office to everyone he knows who does hobby electronics asking for work. I showed him this project, said I might try to do a layout soon and will be bugging him to waste some copper for me. To my surprise, a couple of days later he came back with a kicad layout. After a couple virtual iterations, a nearly fully assembled CAT-644 appeared on my desk wrapped in an anti-static bag.
Tonight I pulled all the ICs out, and started testing connections, voltages, etc. I got brave enough to put my already programmed atmega I pulled out of the prototype, and plopped it in. I found one issue so far: Two traces were too close, shorting together two of the data lines to RAM. I found this with a little 'memory test' app I have. The app prompts over the serial port for a start address and a count. It will write 'count' number of pseudorandom bytes to ram starting at the specified address, and then read it back and display the XOR. This is how I found my troubles: The XOR value was sometimes 2 or 4, not the expected 0. This told me something was wrong with pins PORTC.1 and PORTC.2, and an ohmmeter told me they were stuck together!
VGA output also works: I am running the 'simple' VGA loop, which just continuously displays the first 60k of RAM on the monitor. It's great for debugging RAM addressing issues: Pixels will be stuck, floating, or otherwise repeated. This with the above RAM test program makes it easy to diagnose connection problems.
I have not tested:
audio output (it's just one trace, so it's pretty foolproof)
memory bank switching (again, its just one trace to do this. I know this pin isn't floating, since that would result in the screen unstably switching between the two ram banks.)
SD card: I need to do a little careful probing here with my meter, but once I'm sure it's safe, I'll just have to plug a sd card in and see what happens.
![]()
This is the board by Kevin. All the connections are on a right angle connector, and it happens to fit pretty much perfectly in a center groove of my breadboard.
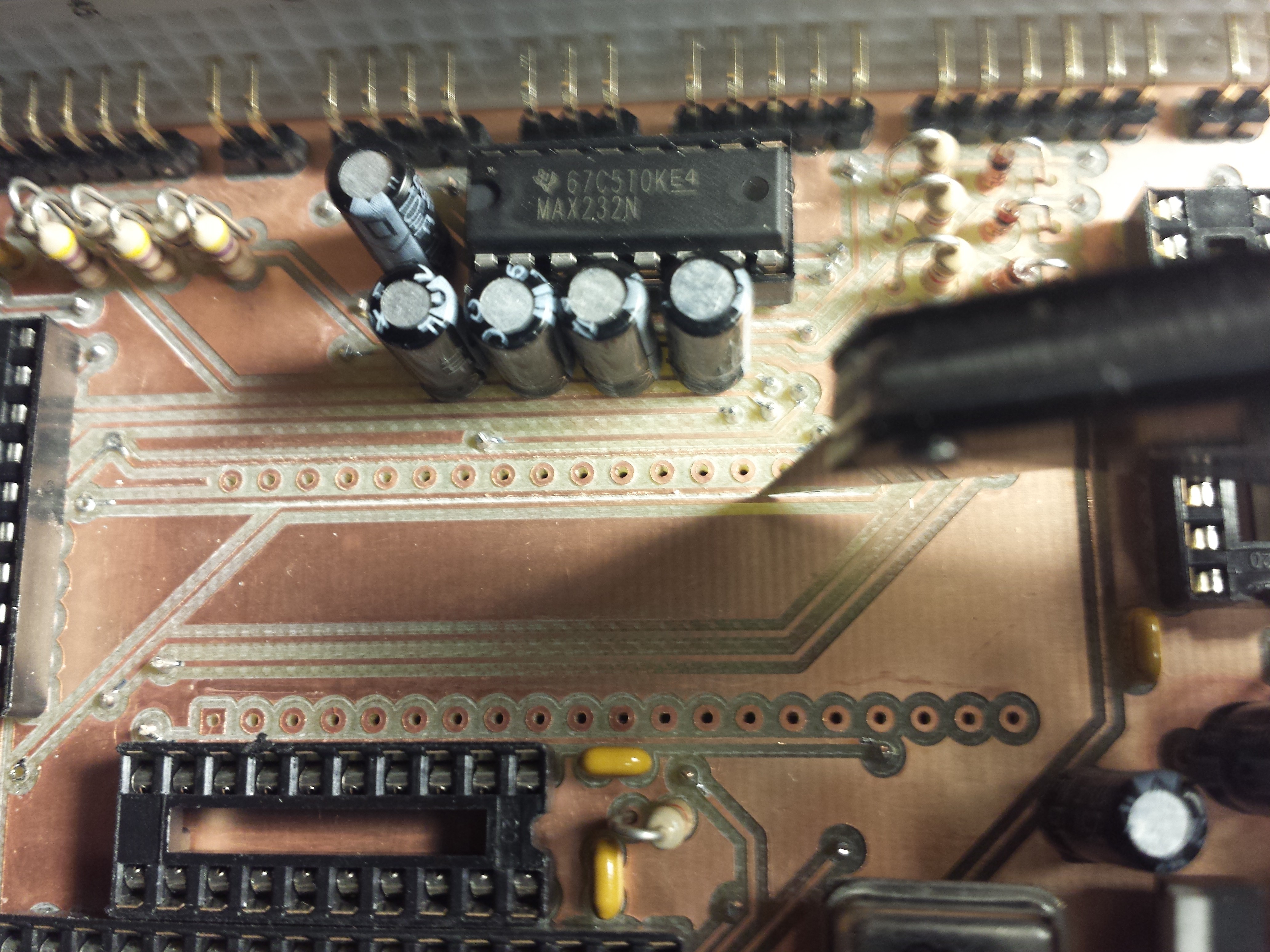
![]() Yep, the shorted traces were in the most annoying place possible: under the socket. Separating these two traces are on the top of the kicad todo list.
Yep, the shorted traces were in the most annoying place possible: under the socket. Separating these two traces are on the top of the kicad todo list. Note, a homemade board is actually what made removing this socket easy: This board was intentionally designed so that all IC pins connected to the circuit ONLY on the bottom layer, because you don't have plated-thru holes, and the tops of sockets are inaccessible. Also, because there's no plated thru holes, the pin can't stick to the inside of the hold. If you use a solder sucker, it all comes out super clean and super easy. Of course a professionally made board with plated thru holes wouldn't have had shorted traces!
-
Been a while
09/26/2016 at 01:56 • 0 commentsI had gotten super-busy with other things, and this project got shelved... I have a renewed interest in it since visiting the Vintage Computer Festival. I have create a to-do list to once the for all finish the project:
- Remove ethernet board. It was exciting to get ethernet added, but was premature and I don't like the way it is interfaced. The extra wiring also makes for a lot of noice on the bus.
- Finalize a base software image. The code I have on github is old, basically just tests the hardware. I want to at least have a base image (.hex) file that brings up all the hardware, and dumps the user in an interpreter environment.
- Filesystem: I have a driver that allows reading and writing of blocks on an SD card, and I have a simple block allocation/delteion/freelist scheme. A file is a linked list of disk blocks. If you allocate a block, you can chain many blocks off of it, and if you know the starting block number of a file, you can read the whole file. I considered FAT, but FAT has 4k clusters, and I'd rather work with 1 disk block at a time (512 bytes). Also, the fun of the project is building it yourself. A directory of files will likely be a regular file that just happens to have a list of files in it and their starting block numbers.
- Hardware rebuild: The physical hardware is a mess. It works. I will probably uncover problems as the software develops. I would like to buffer-isolate the external ram address bus from the spi bus as best as possible. Right now just too much happening directly off of PORTB. MISO definately needs really special handing, as it needs to accept: input logic from 3.3 devices, needs to be able to output 5v logic to ram addresses.
- re-add ethernet
I have also considered adding a attiny84 or atmega328 to the project as a coprocessor to handle the sound, keyboard, disk, ethernet (its a "southbridge"), but someday there might be a CAT-644 R2.0.
-
Messy Ethernet Board
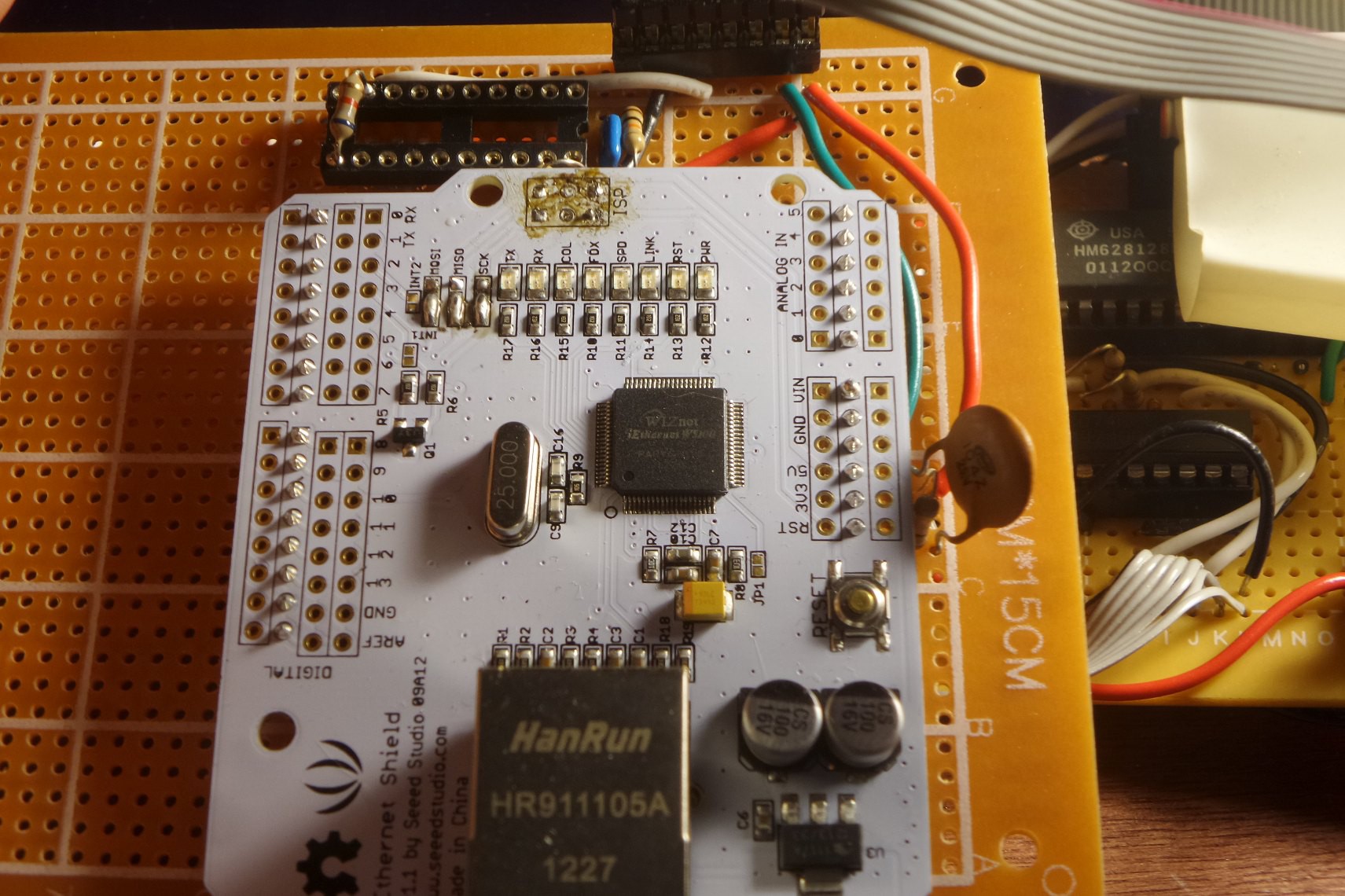
06/04/2015 at 05:05 • 0 commentsSomeone from Wiznet contacted me and wanted to see how I was using the Wiznet W5100 in this project. Here's a look at the ethernet interface. I am using the Seeed Studio Ethernet Shield, version 1.1 This version has since been discontinued by the manufacturer. There are a couple small modifications:
1. The ISP header has been desoldered. It was in the way.
2. The board has been solderd to a piece of perfboard with header pins. I wanted any modifications to this board to be as nondestructive as possible. I could still take this board off and put it on a real Arduino, if I wanted to.
3. This board was intended for use on an Arduino, which already has reset pulled up to 5v. I added a 5v pullup resistor. The W5100 chip did not like being reset 'too fast', so a .1uf capacitor in parallel with the pullup makes the reset signal rise slow enough that the Wiznet sees a reset.
4. On the top of the photo, you can see where I tried to buffer the output of the MISO line with an old 74244 tri-state buffer and failed horribly. The resistor is a cheap hack, which I covered in a previous post.
![]()
-
Software Update
05/18/2015 at 03:16 • 0 commentsNow that I can communicate with both the SD card, and the ethernet (Wiznet) interface without interference from each other, I need to return to a key part of the system: The software. I have the following implemented already, with the intention of building it into more of an OS than just a library of random utilities.
(virtual) memory:
I've implemented a simple malloc replacement. The reasons I am not using the built-in libc malloc are 1) I want to write an allocator because I've never done so, and 2) I plan to do some unusual things that regular malloc will not support. Namely, I want to make use of handles. I already have simple malloc and free working, the next thing is to work on is dismiss and summon:
handle dismiss(void*) : Given a pointer to a block, returns a handle to that block. The pointer from this point forward is considered invalid. The pointer input must be at the start of a block originally returned by malloc. (You can't just dismiss part of an array or struct, only the whole thing.)
void* summon(handle) : Given a handle, returns a pointer containing the data that was saved in the handle. The pointer returned may be different than the original one passed in to dismiss.
The idea here is that such a small heap may easily become fragmented. Large data structures, like trees, linked lists, etc, may refer to their members through the use of handles instead of pointers. Traversing a linked list will always 'summon' the next element, and 'dismiss' the previous element. What is the point of this? Summon and dismiss track what objects are currently in use, and provides a way to safely move objects not in use. The heap may be de-fragmented. Objects on the heap may even be moved out of internal AVR ram and into unused parts of the external (video) RAM, OR even swapped to disk. Poor man's virtual memory. The goal is a C program won't care where a summoned struct is coming from.
scheduler:
I've been running (in simavr, not on the actual Cat-644) a simple round-robin cooperative multitasking scheduler. I
filesystem:
read/write sd card blocks (raw)
each block has a checksum, multiple blocks can be chained to create longer files
unimplemented:
delete (once a block is used, there's no recycling (yet). Remember filling 1GB from this machine will take forever. I have a while to deal with it.)
directories: To read previously stored data, you need to know the block number to start reading from. This is exceedingly primitive. Plans are to put a directory file on 'block 1'.
device abstractions:
I have created 'block device' and 'character device' abstractions. Note, the definitions I'm using here are not quite how we would define them in LInux:
generic device: Only supported call is 'ioctl'.
character device: Can read/write 1 byte at a time (getc, putc), and has a test to tell if a character is ready (kbhit). Implemented block devices: ps2key (input only), serial (both), vgaconsole (output only), file (as on disk). Also has ioctl. For serial ports, IOCTL_SETBAUD, and for files, IOCTL_SEEK.
block device: Can read/write 1 block at a time. All blocks are the same size (SD card is 512 bytes), and addresses are block numbers. THe only supported calls are ioctl, readblock, and writeblock.
I have plans to let files and other char devices read and write more than 1 byte at a time, but I'll get to that as a lower priority.
graphics:
implemented: drawdot, drawchar, drawsprite, clear screen, flip video page
 Yep, the shorted traces were in the most annoying place possible: under the socket. Separating these two traces are on the top of the kicad todo list.
Yep, the shorted traces were in the most annoying place possible: under the socket. Separating these two traces are on the top of the kicad todo list.