The Armcopter is a robot designed to help around the house. It is designed to retrieve items, to perform chores as skillfully as any person, while being safe and integrating seemlessly with the home environment. Even more than a robotic butler, the Armcopter would be the first manipulator home automation device, allowing one to clean, cook, or prepare by sending a voice command from their phone, performing tasks without being home.
The Armcopter is built and tested on custom firmware, but would ultimately be transitioned to the Px4 flight control software to have the support of an open source community. The Armcopter is built on the Odroid C2 system on a chip for on-board processing capabilities superior to a Raspberry Pi, without significant price increase. The robotic framework is implemented through ROS and the flight controller and on-board computer are connected over serial. To have a compatible connection between the onboard computer and the ROS framework, a port of Debian Jessie was used with ROS Kinetic built from source.
Designs for a frame that would provide sufficient airflow for the rotors, while creating a safe enclosure, were developed, but have not been implemented or manufactured. The current plan is to produce a frame from High Impact Polystrene vacuum molding.
The robotic arms, the arms control software, the computer vision, and the AI packages are not implemented.
The project has been halted due to amount of issues needed to be solved before it could be successful, namely, flight time, lifting capacity, airflow blowing items around, and aircraft weight to say the least. The task of a cleaning butler robot would be better suited to a system of multiple robots for each brand of task, such as a dusting robot, vacuuming robot, retrieval robot, etc. Therefore, the project will be on hold until further notice.

 therobotstudio
therobotstudio
 Doan Hong Trung
Doan Hong Trung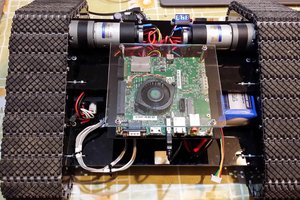
 Walter Lucetti
Walter Lucetti
 Dejan
Dejan