Introduction:
A Rotovap is extremely useful to have for chemistry but is usually prohibitively expensive for most people to buy (~$500 used and >$2000 new).
This project outlines how to create your own rotovap assuming you have a vacuum supply, wood working tools, and a 3D printer (or just buy printed parts off of a printing service) for less than $100 USD in parts.
Although this rotovap currently does not recover the evaporated solvents like normal rotovaps do, you can easily add a condenser setup and a solvent receiver flask immediately past this setup.
*Disclaimer: Working with glass under vacuum can result in injury, build this at your own discretion*
Parts:
- 1 x PTFE Standard Stopper (This will be the rotary vacuum joint - the most important part)
- 1 x Metal Rod (5.0mm diameter rod, can be found at hardware stores)
- 1 x Pipe (Vacuum Adapter) (7.6mm OD, 6.8mm ID; I got mine from scrap but try checking hardware stores. The ID as long as it's not so small to impede the vacuum can be anything)
- 1 x Glass Transfer Adapter here-in called Flask Adapter (Specifically, mine was a 24/40 Male Joint and 24/29 Female Joint)
- 1 x 25 - 35 RPM high torque motor (Torque is needed to overcome the friction the vacuum puts on the rotary joint)
- 1 x Hinge (Optional if you want to be able to change the angle of the rotovap)
- 1 x 12V PSU (To drive the motor. One could replace this with a PWM driver to adjust the rotational speed)
- 2 x Shaft Bracket (3D printed https://www.thingiverse.com/thing:3770224)
- 2 x Gear Set (3D printed https://www.thingiverse.com/thing:3770224)
- 2 x Flask Adapter Holder (near evaporation flask https://www.thingiverse.com/thing:3770224)
- 2 x Flask Adapter Holder (near vacuum inlet https://www.thingiverse.com/thing:3770224)
Materials:
- Several wood screws
- Epoxy
- Lubricant (Anything that's ABS plastic safe or whatever the plastic used for 3D print is)
- Wood (of various assortment, I basically used scrap wood I had left over from other projects)
Construction:
Because of the variable parts that can be used to make this, I don't have a step by step construction guide or exact measurements but here's the basics of the construction.
*Note: Pilot holes are necessary with thin pieces of wood or the screw will split the wood*
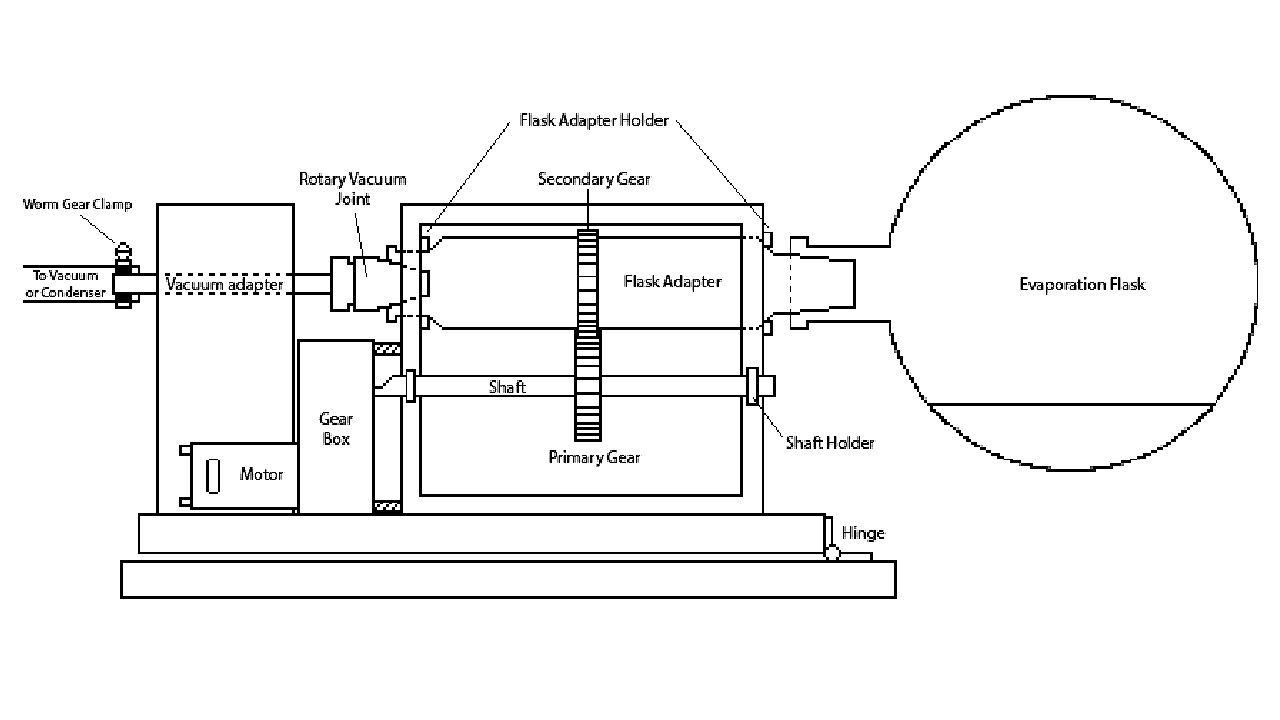
Main Body (Flask Adapter, Gears, Gearbox)

- Buy or print the 3D parts in the parts section. Keep in mind you will most likely need to expand the bracket holes and the primary gear hole as I purposely made them slightly smaller than the shaft to make it fit nicely.
- Mount the secondary gear on the adapter first using epoxy (I used putty epoxy).

- Create two wooden plank to hold the flask adapter holder making sure there is ample space for the flask adapter to rotate freely in the hole. This hole should be bigger than the flask adapter but less than the flask adapter holder screw holes. Keep in mind of clearance of ~2.3mm between the pairs (top and bottom) of the flask adapter holder to permit easy rotation of the flask (one could print or buy a bearing instead of the flask adapter but this brings complexity not needed with a high torque motor).

- With the flask adapter in place like the above picture (without the rotary joint), finish off top and bottom of the with wood making sure that the flask adapter can still fairly freely without sliding sideways much.
- Prepare the gearbox so that it can properly couple with the shaft (my gearbox has a D-Shaft/Half moon which fit the shaft nicely once ground down to the proper D shape).
- Get the primary gear on the shaft and flank it with the two shaft bracket. With the two brackets near the two respective edge of the wooden flask adapter (see the diagram) and the primary gear positioned in line with the secondary gear, slide the brackets along the wood until the two gears mesh (This may take some time to get right and make sure that the gears mesh but too tightly and the gears may freeze when rotating. Because of the imprecise nature of the build for ease of build, slightly loosely meshing...


 doctek
doctek
 Brian Brocken
Brian Brocken
 Otto Gloeckner
Otto Gloeckner
 Elliot
Elliot
Can you send me the 3d files by e-mail please