 Shawn Chen
Shawn ChenWhile Little Sergei was training for his new job, disaster struck! His "hip" gave out, incapacitating Sergei and putting a possible end to his ambitions. Now, he needs to wait for a replacement hip, and hope it helps enough to resume the life of a robot butler.
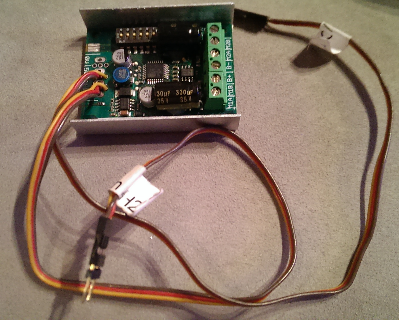
Unfortunately, the Sabertooth Dual 12A Motor Driver burned out in the middle of testing, complete with smoke and the smell of fried electronics. After some testing, the most likely cause was that the connector wires got squished together, or into the metal body. As a result, two wires were grounded and burned out, so only one of the sides drive now. An important lesson in wire management: exposed wires should be kept track of at all times, or wrapped in an insulator like electrical tape.
Unfortunately, this means that the Robot Butler project will have to be on hold until a new motor controller can be found. Though, only one of the two controllers on the motor driver is broken. So for now, the half working motor controller has been salvaged. Perhaps it can be re-purposed for another project.
One Month Later...
Little Sergei is able to acquire a hip replacement, and is now back in action. It's a bit more complicated to move around now, but the enterprising robot shall not let that deter his quest.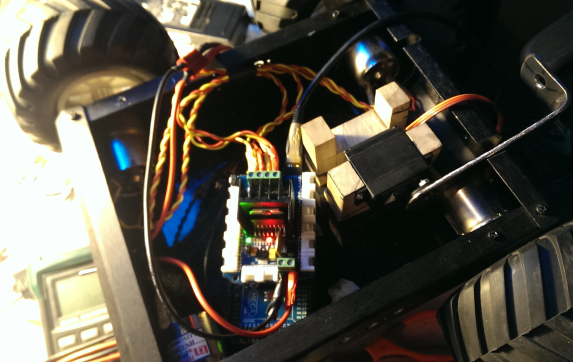
A replacement motor drive is being used to control the robot motors. It is a Seeedstudio Motor Shield v1.0, which connects directly to the Arduino Mega. This ended up actually simplifying the the layout of the robot. The side connectors may also be amenable to servo motors, removing the need for a breadboard to handle the Lifting Servo Motor. In addition, the motor shield automatically bridges and powers the Arduino, so the 5V Universal Battery Elimination Circuit can be scavenged from the project.
Controlling the motor shield is a bit different, each motor utilizes three PINs, compared to the original one:
- Enable/disable
- Power draw
- Forward/Reverse
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.