 Open Eco Dev Club
Open Eco Dev ClubThe manipulator is the pivot of a set of useful machines. The most famous example is the fruit nut vegetable automaton that harvests veggie food all on its own. Its environment has already been created (log entry).
It is made from readily available and easily DIY created parts. Mechanics and electronics will use general components only - and that in a modular way. (Because the internet is full of little or even less useful manipulators that fail to do real work or require you to run an entire manufacturing facility or many thousands of euros just to build one.)
The worlddevelopment manipulator costs approximately 1 K euros in total and is designed from the ground up to do serious work and to be entirely DIY repairable.
The fruit nut vegetable bot will show the manipulator in action for the first time this autumn: caring for the soil (plowing, weed pinching, watering, properties sensing, ...).
Through the winter a software stack will be developed to automate plant care which will do its magic in spring 2018.
Multi purpose
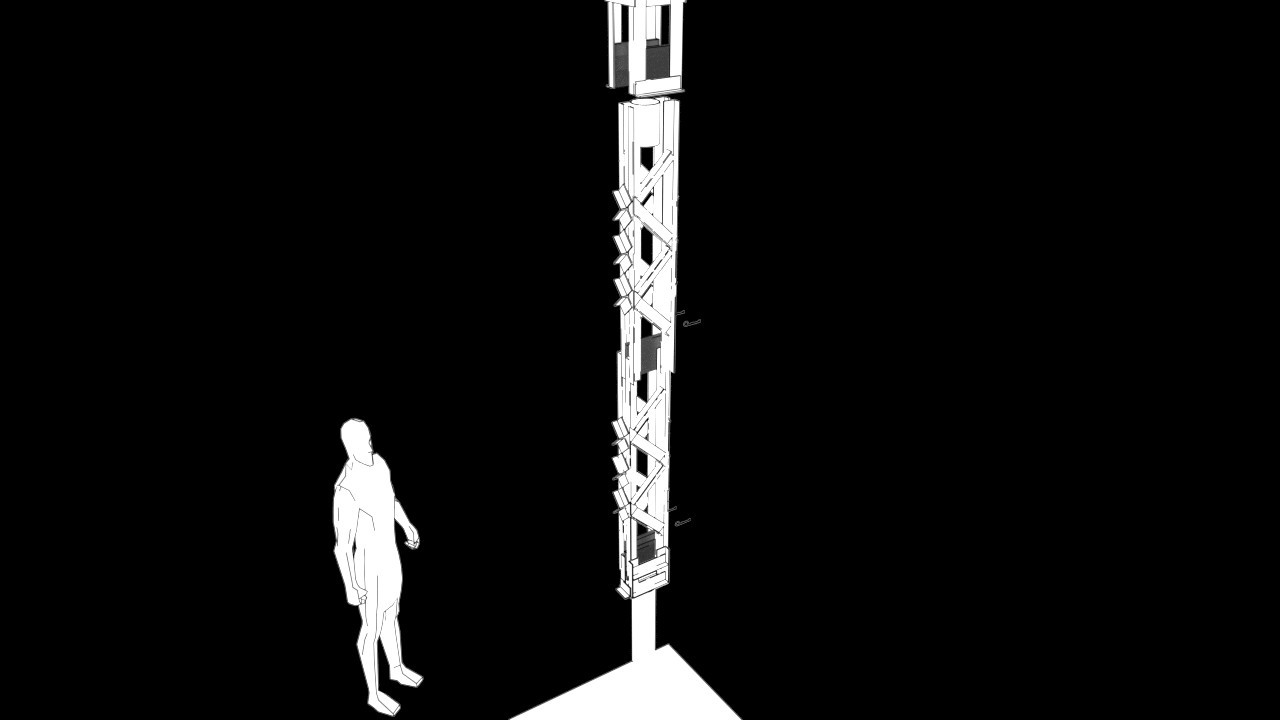
The manipulator - being powered hydraulically - is tremendously overpowered for the plant care job. Even worlddevelopment alone will use it in many multi faceted ways. Imagine how useful a free UNIX5 axis robotic arm is, one could have it:
- defend e.g. plants (scarecrow)
- win robot wars or contests
- grow, harvest plants or ripening low hanging fruits up to approximately 3m height.
- lift tree trunks
- play badminton with you or your kids
- keep you safe high in the air to repair e.g. the roof or water drain system (the big variant with 7m reach radius, 8m max height).
- lift your car to replace tires quicker.
- or whatever else your ethical hacker mind can think about.

 Kevin Harrington
Kevin Harrington
 Haddington Dynamics
Haddington Dynamics
 Kenny.Industries
Kenny.Industries
England will once again be a force to be reckoned with in the upcoming 2023 ODI World Cup as they make their 13th consecutive appearance in the ICC Cricket World Cup . With a strong track record in the event, England has a history of success in the World Cup, including their victory in the 2019 Cricket World Cup.