As of know, the robot arm is fully functional and tested with the Serve Calibration code.
I have initially written the code on Arduino Web Editor but then installed an add-on to MATLAB and started using MATLAB to program my microcontroller. This is a huge advantage since all the computation is done on MATLAB (instead of the microcontroller) and MATLAB has a greater memory compared to the microcontroller.
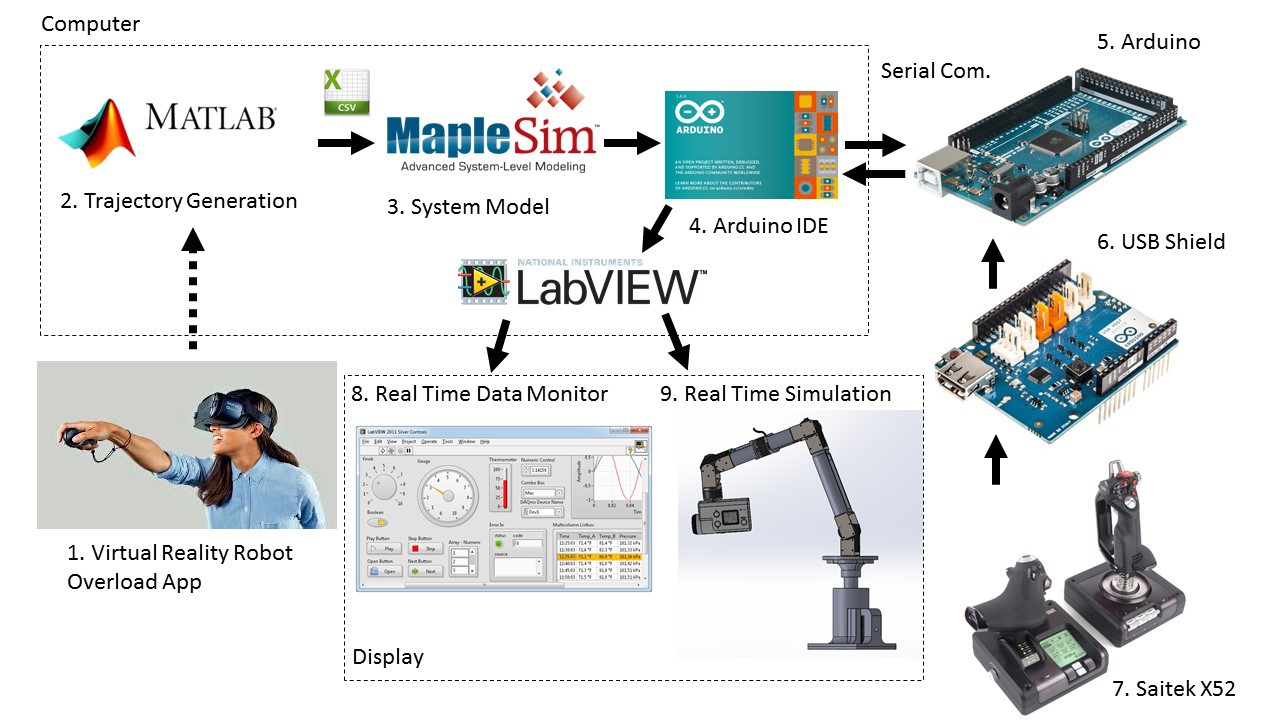
Know we can control the robot arm (live time) using inverse kinematics. As the diagram in the appendix shows, the coordinate data will be inputted from a Joystick. The video below shows a quick demo.
{kind=link}
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.