 Hexastorm
HexastormEarlier I discussed that the prism ideally is balanced and how this could be done.
The acceleration and position of the prism needs to be measured during rotation.
The first step is determining the position of the prism, i.e. rotor. Two options were considered; detecting a marker with laser or detecting a marker with a camera. I went for a camera as it seemed more robust.
Also, the position of the weights needed for balancing can be visualized with the camera.
In specific, the UI3060-m-GL, specs are; USB 3.0, CMOS, 166.0 fps, 1936 x 1216, 2.35 MPix, 1/1.2", Sony, Global Shutter. I used a shutter time of 0.019 milliseconds and a ring light illumination. Having a camera with a global shutter is key, rolling shutter cameras I tried didn't work.. Initially, I thought the ring light would be useful as strobe light but the camera has so short exposure times it just needs additional light. I am planning on building a dedicated setup, see github, but used the current laser module for the test.
The setup is as follows;
Camera exposes from the top using a lens with a focal length of 12 mm, ring light is given 24 volt via power supply.
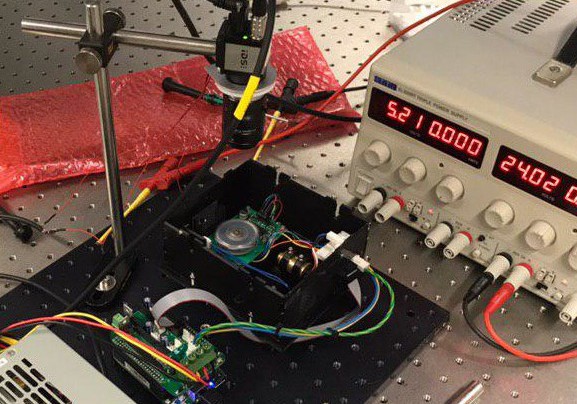
As you can see I used the mirror and not the prism. The mirror is already balanced and can go up to 21000 RPM making it better for exposure tests.
At 0 revolutions per minute the mirror looks as follows with auto exposure settings;
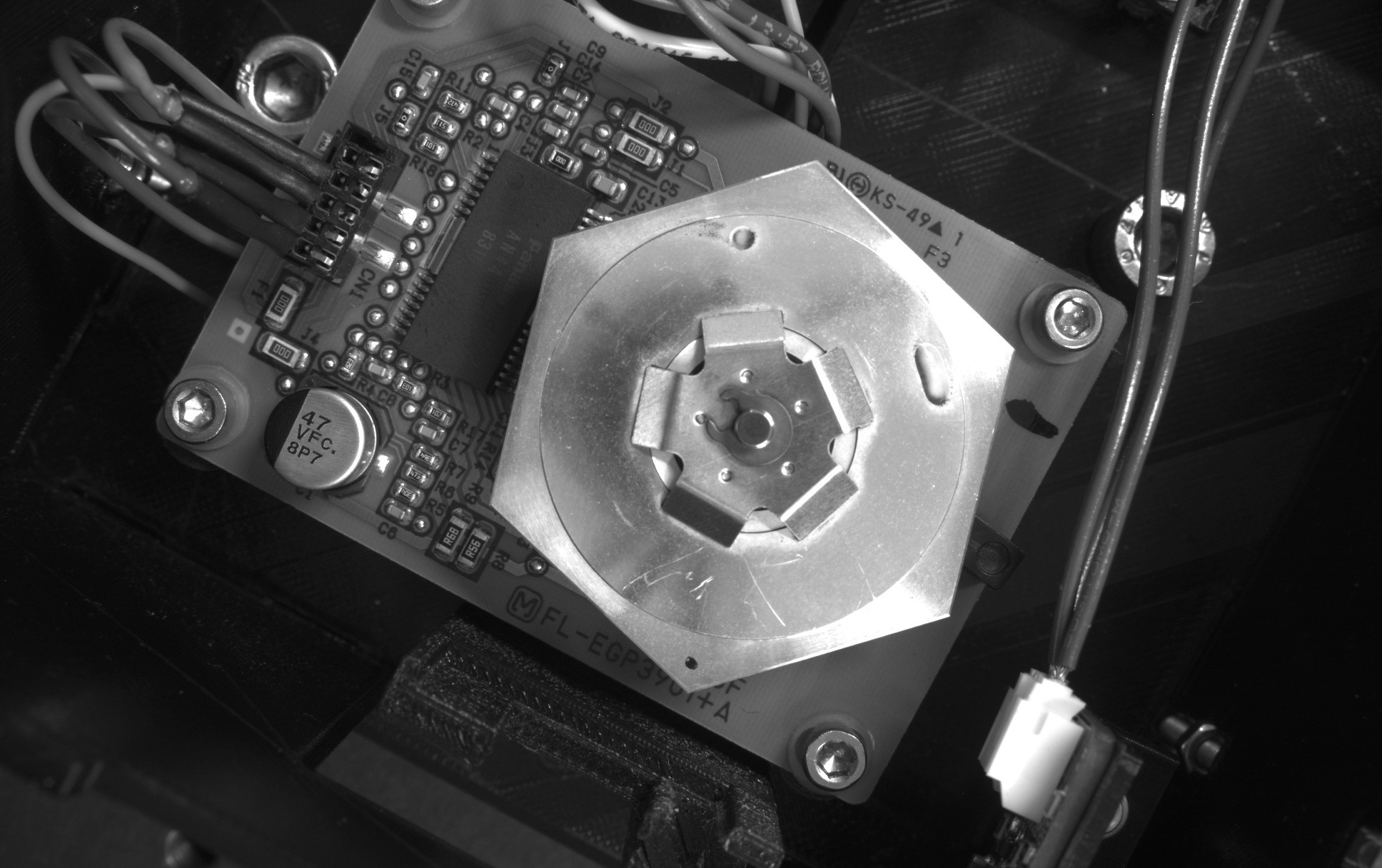
I did not modify the mirror. In the ring you can see two markings. This is the weight used to balance the prism. The outer black dot, outside the ring, seems to be made with a marker. This seems to be used to determine the position of the rotor.
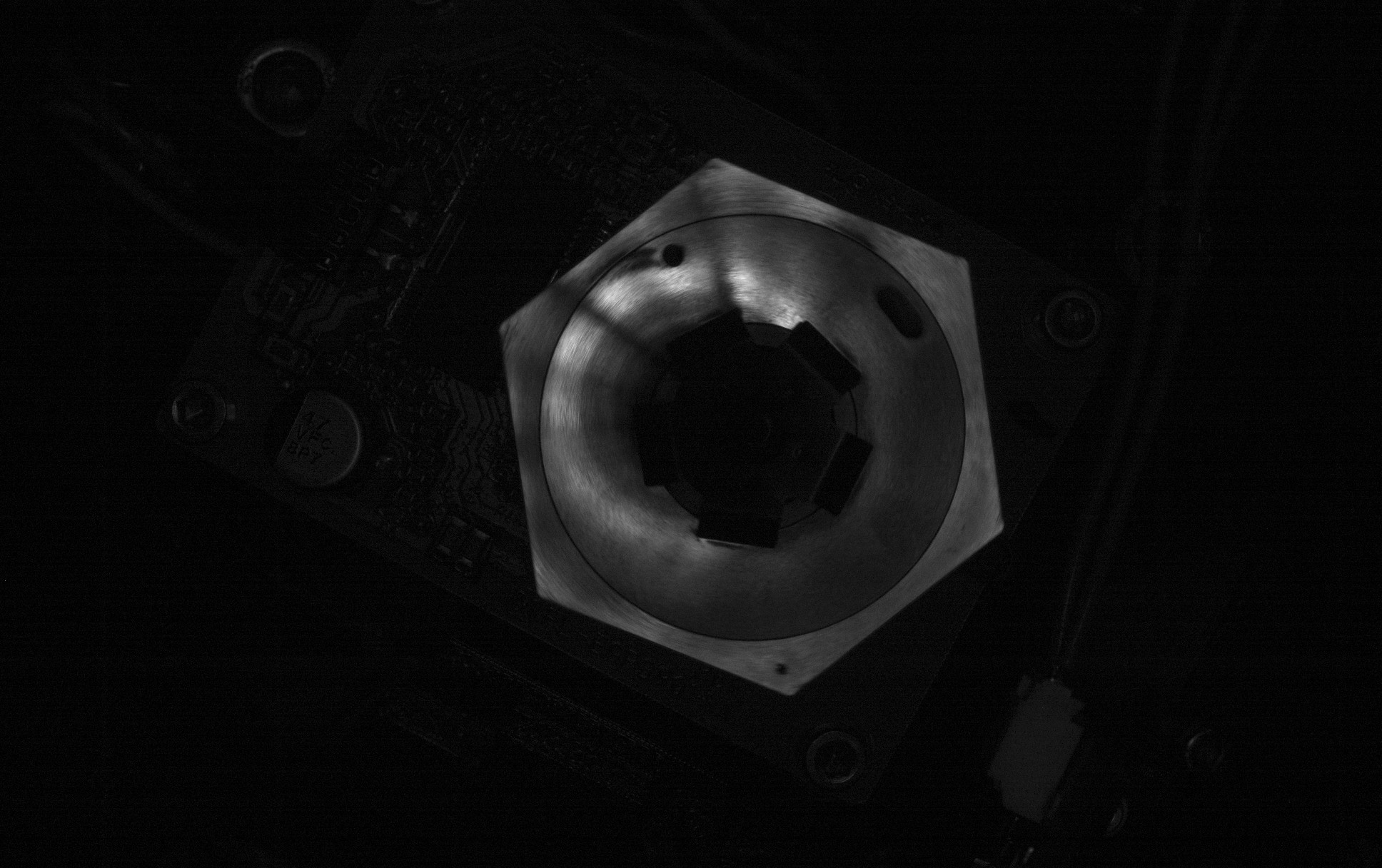
At 21000 revolutions per minute the mirror looks as follows with 0.019 ms exposure time;
You can see a reflection of the ring light as the illumination is not really proper. In the final setup, I should use a better diffuser so you don't see the positions of each led.
 Next, I will see if I can determine the force on the bearing during rotation. Then, I will need to relate the two signals and see if I can balance those prisms :-).
Next, I will see if I can determine the force on the bearing during rotation. Then, I will need to relate the two signals and see if I can balance those prisms :-).
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.