 Mark Mullin
Mark Mullin“I learned a long time ago that reality was much weirder than anyone's imagination.” Hunter S. Thompson
The last week was eaten by doing all of the engineering and CAD work to design the automated mast for the Quamera. When the Quamera is mounted on this mast with it’s almost full complement of 24 cameras (polar cameras had to give up their space for the mast) this allows the control systems to move the camera up and down and to spin it rapidly about this vertical axis. The entire body of materials involved in the construction of the mast is sourced from ServoCity and is based on their Actobotix components.
Here’s a drawing that gives you the context for the mast – the camera can move up and down on the mast, and the lower rotation drive can rotate the entire mast by 45° CCW or CW. These two steppers will be controlled by an Arduino, which will prove the basic motion tracking information and control surfaces to net driven logic on a controlling Beaglebone processor. The transparent bubble represents the volume occupied by the camera.
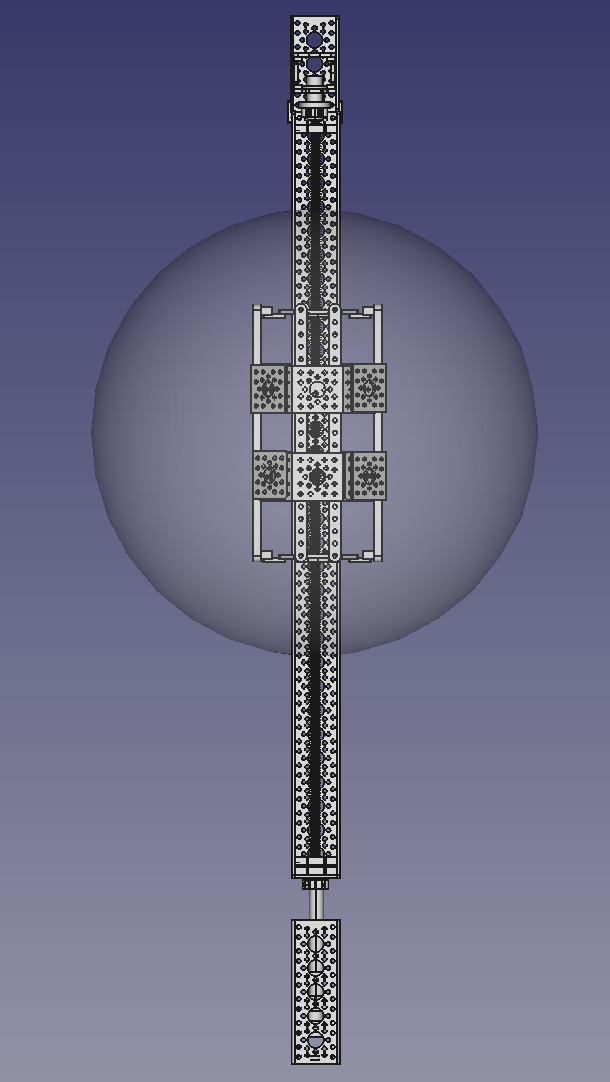
The most important bit is the spinning. In some of the previous pictures you can see the detected visual field overlap as false colors in the fused images - as the camera begins to oscillate back and forth by +-45° around the vertical axis, this allows it to capture accurate parallax error across it’s entire visual field, and that is what gives it what it needs for depth.
The ability of the camera to move up and down is not necessary per the hypothesis, however what math says is often ‘adjusted’ by engineering with comments along the line of ‘yeah, that’s nice but it ain’t never gonna happen’ :-) The information used in vertical travel will be used to determine whether in fact this information is necessary – it will also serve as a means for some of the first next generation math tests, when all of the cameras can rotate by something less than 45° on each axis (because optical zoom is coming ), and can perform these rotations off axis
As a slight digression, now that it’s become mobile, I’ve successfully identified the Quamera’s corporeal patronus, namely this little fellow from the movie “Dark Star” There’s a lot of history here…..

Here’s some of the patronus in action
I used FreeCAD to do all the CAD work, and I’ve released all of the FreeCad files I generated under the Creative Commons Attribution 4.0 International license. You can get a much closer look at what’s going on by downloading FreeCAD if you don’t already have i - this will let you examine the 3D structure and any 2D engineering projections that strike your fancy. That said, the first place you want to go is to the Google Sheet shared here -- This will give you a high level map of the various subassemblies, a bill of materials, and a really sad workout of the torque needed to drive the system. From there, you can root around in here for all the stuff.
Am open to any commentary or help with this – I’m the first to admit that ME isn’t really my forte, I’m probably more of a menace than a solution……. But it’s a prototype/MVP, so the bars a little lower.
A few more pictures
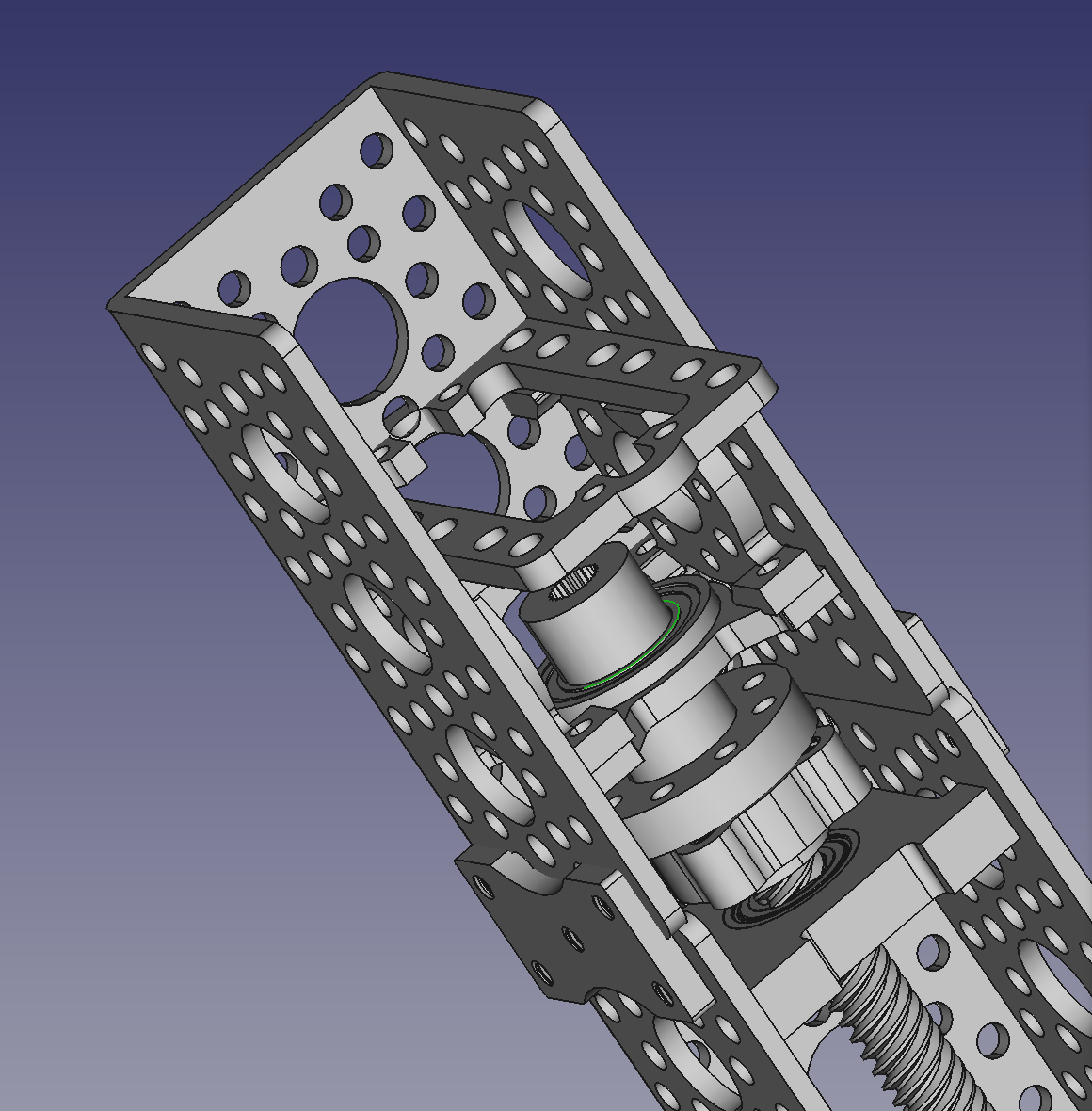
Here's the top vertical translation drive
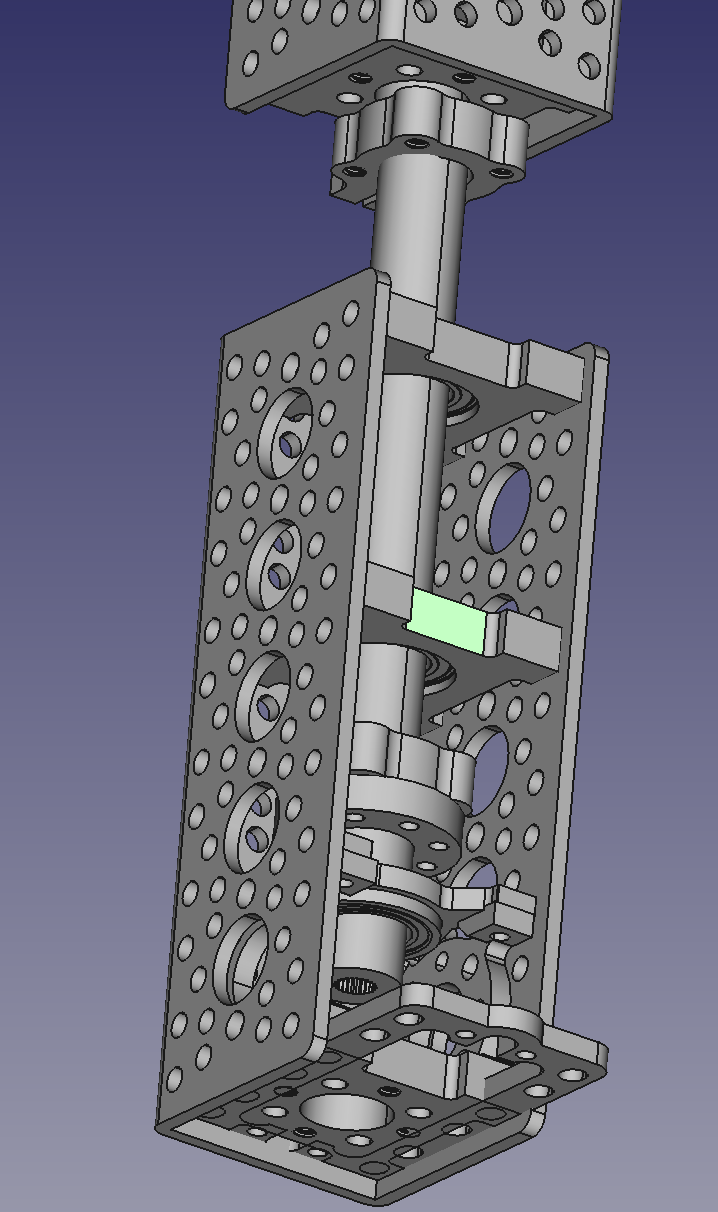
This is the bottom rotation drive - poor thing has to spin mast, armature, and Quamera
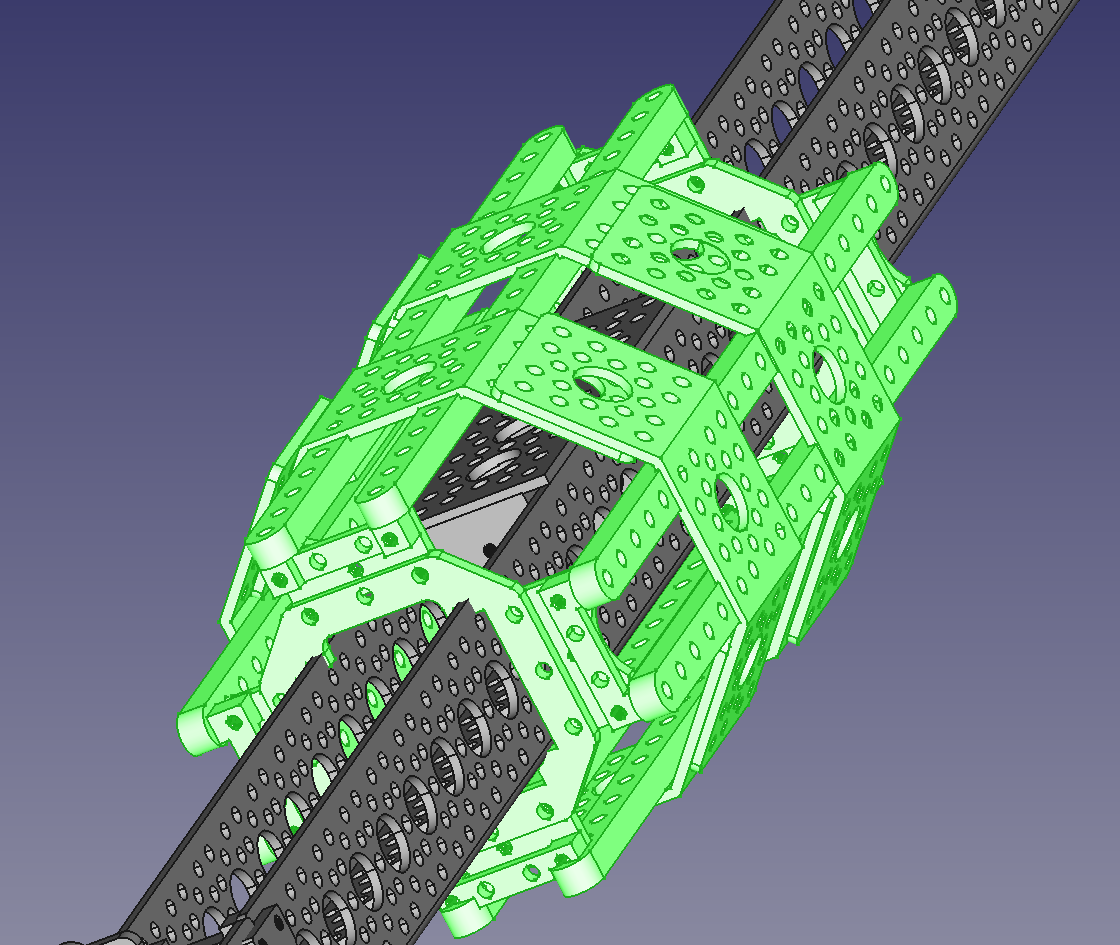
and finally, a shot of the armature - you can see the drive plate and one of the nut plates on the screw at the center
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.