Frederico Sobreira
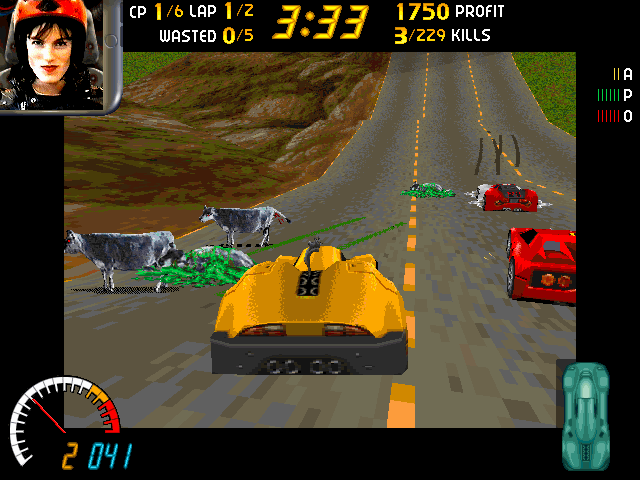
Frederico SobreiraIn a simplistic way, FULLMETAL RACER is remotely driving real cars on a real track (First-Person View).
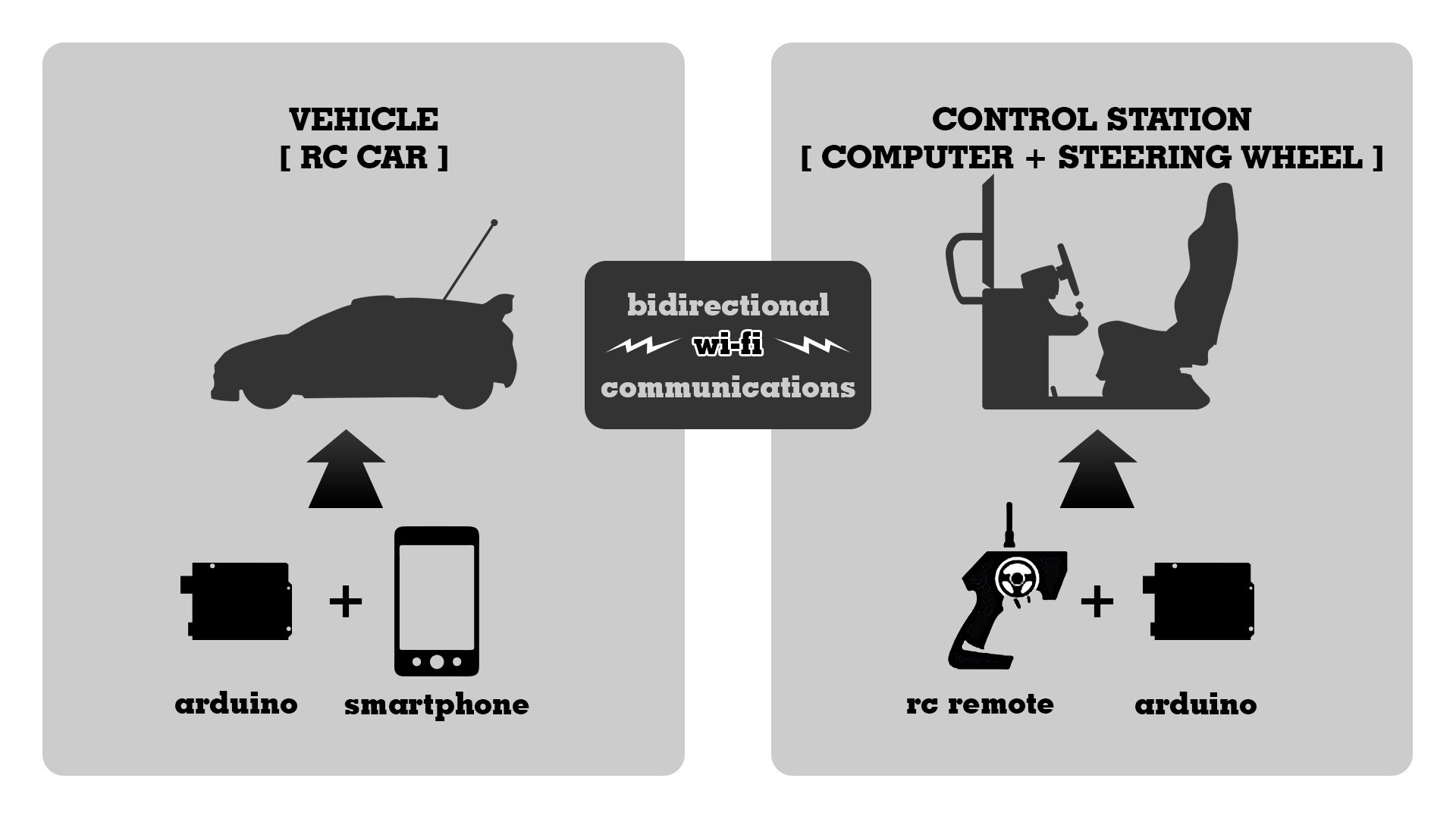
In a more descriptive way, FULLMETAL RACER consists of three main elements: vehicles, stations and racing track.
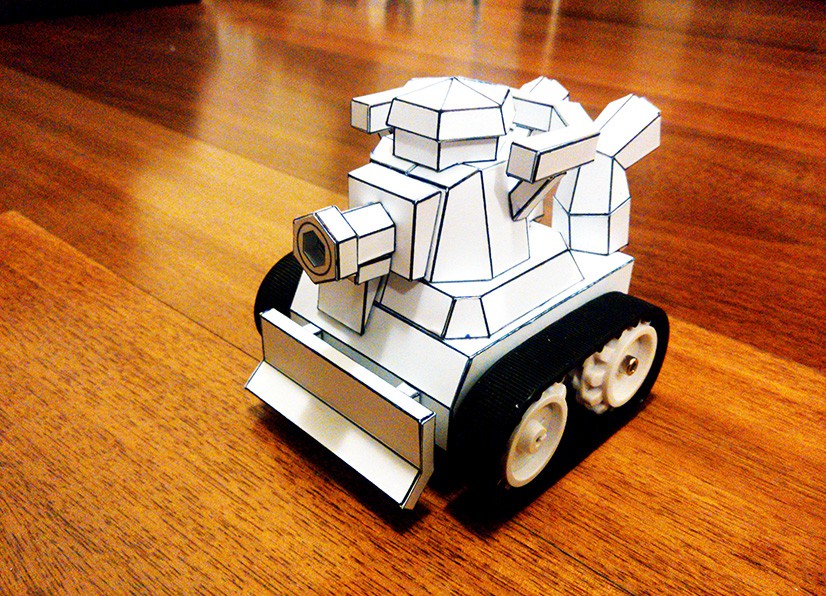
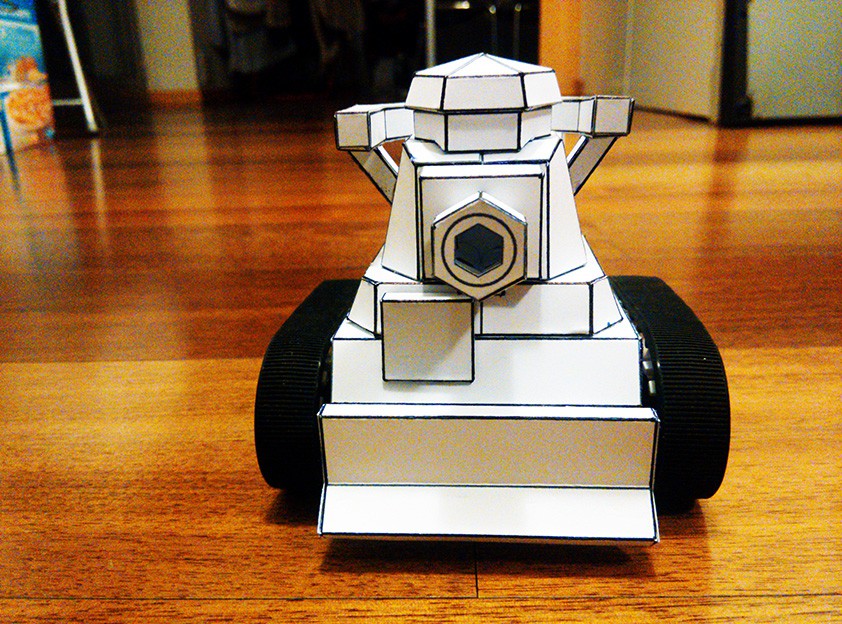
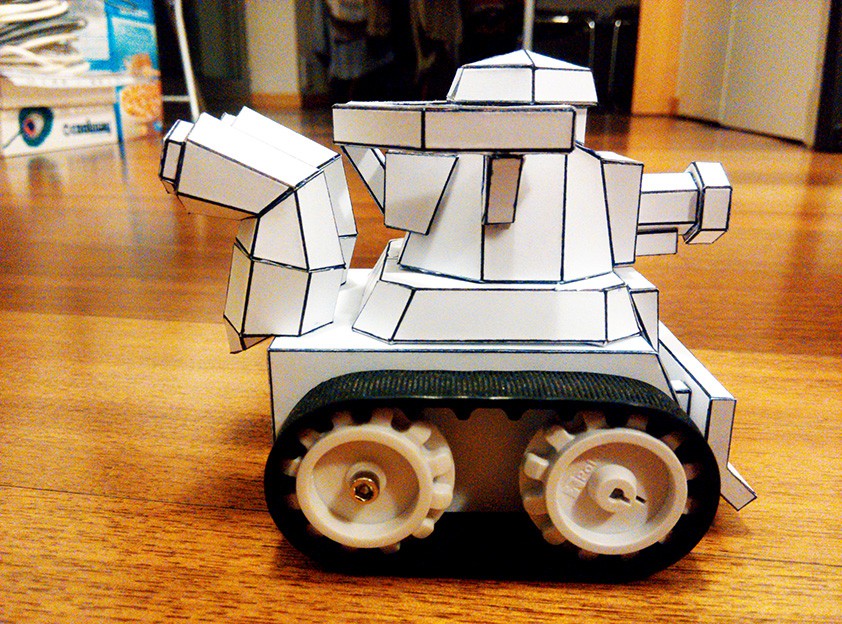
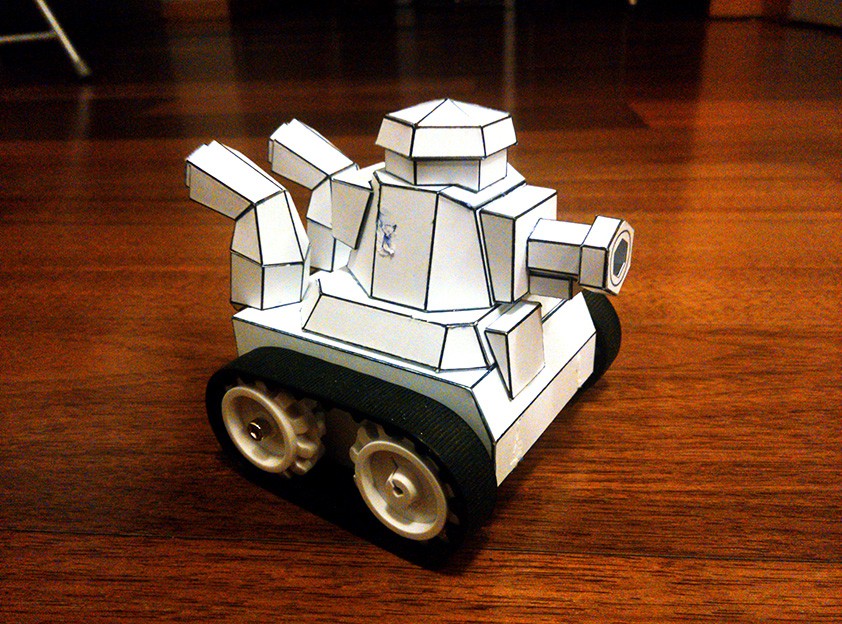
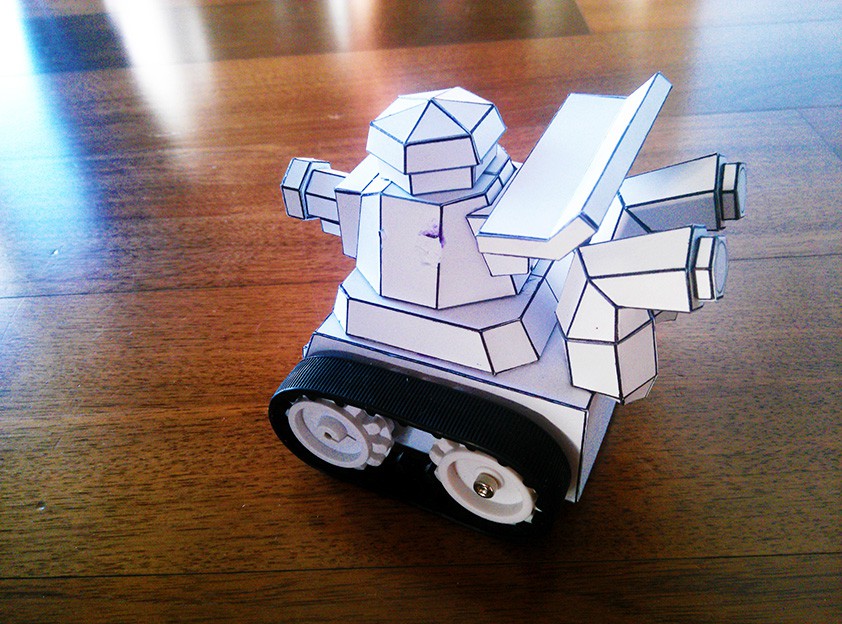
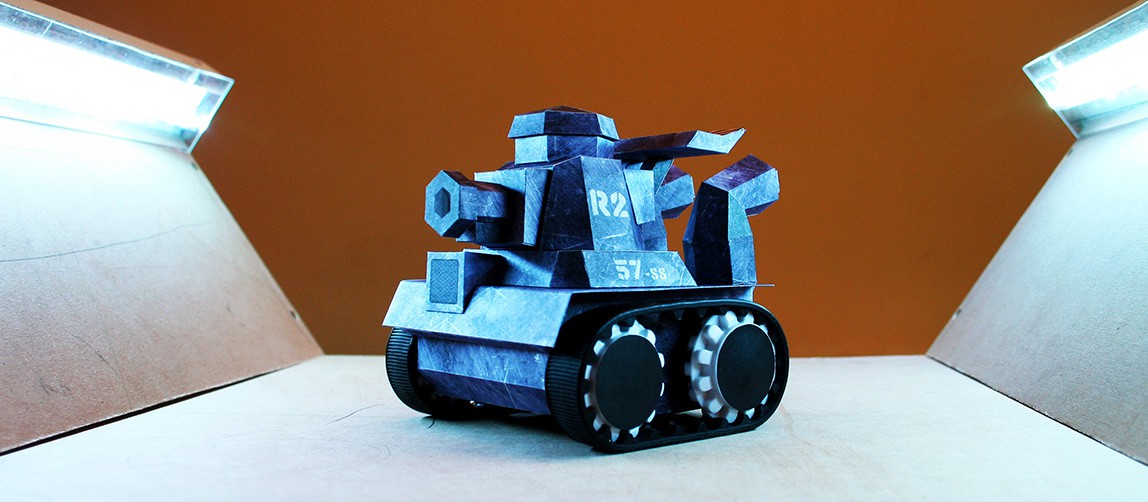
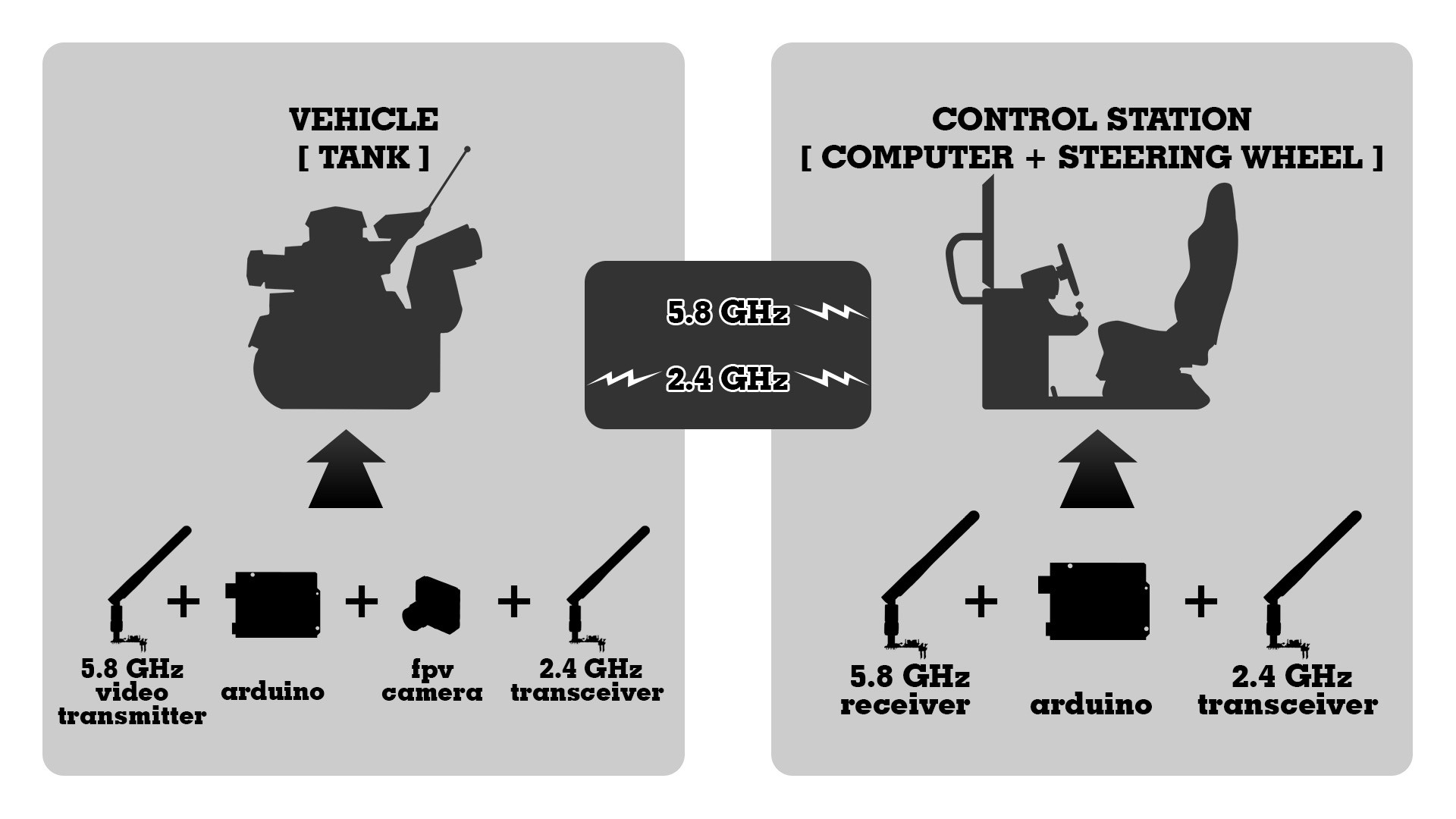
The vehicles are equipped with video cameras, telemetry and actuators to control them. These are also equipped with "weapons" and "armor". These act and are actuated based upon sensors and actuators innocuous to material elements (no real weapons and armor, just virtual).
The stations have driving controls to drive and control the vehicle (steering wheel, pedals and buttons) as well as screens that show the video feed in real-time from the vehicle's camera and telemetric information collected from it. Like a virtual racing game, the pilot/player, besides their own telemetry, also has access to some telemetric elements of other pilots/players racing along and information from the game itself (vehicle positions, timings, etc.).
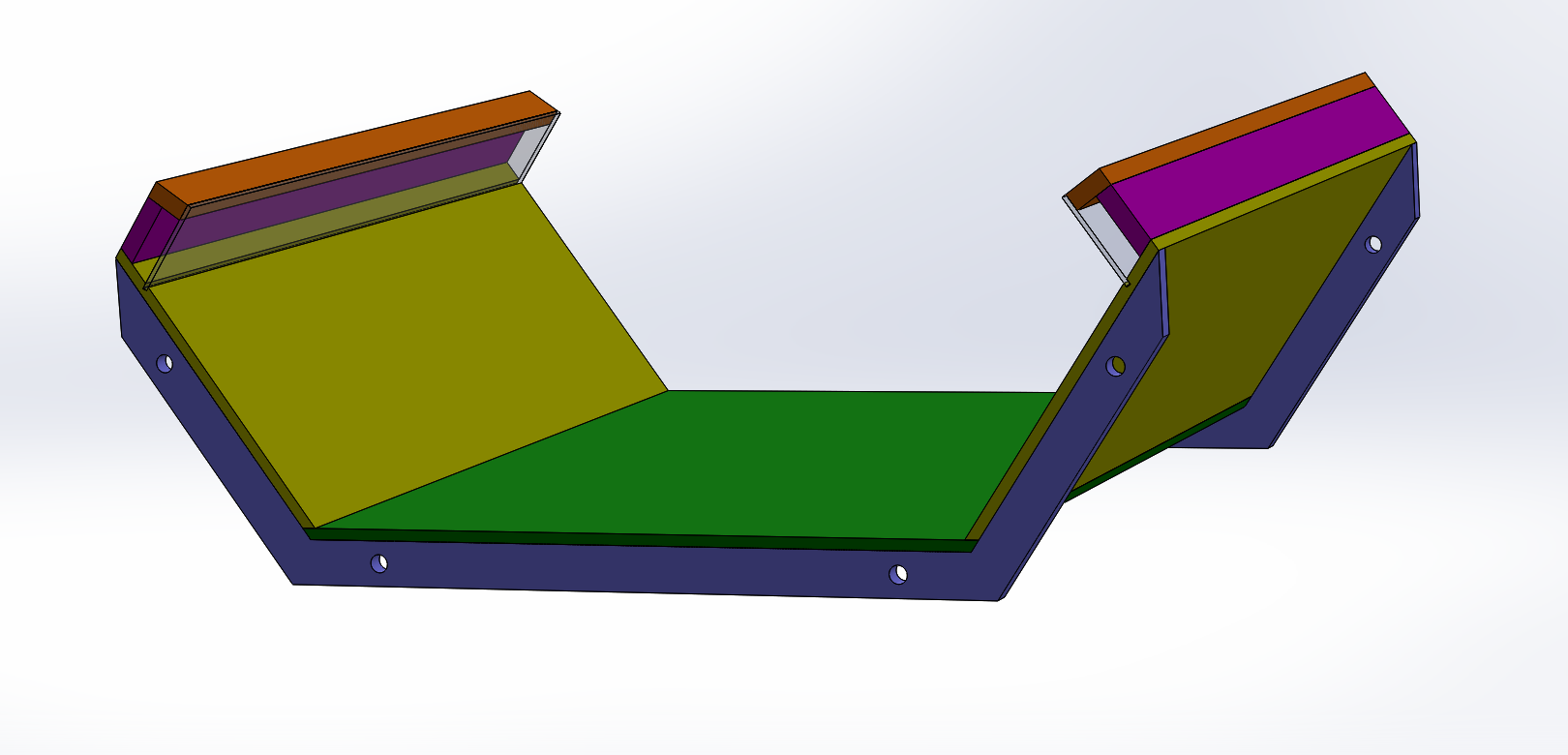
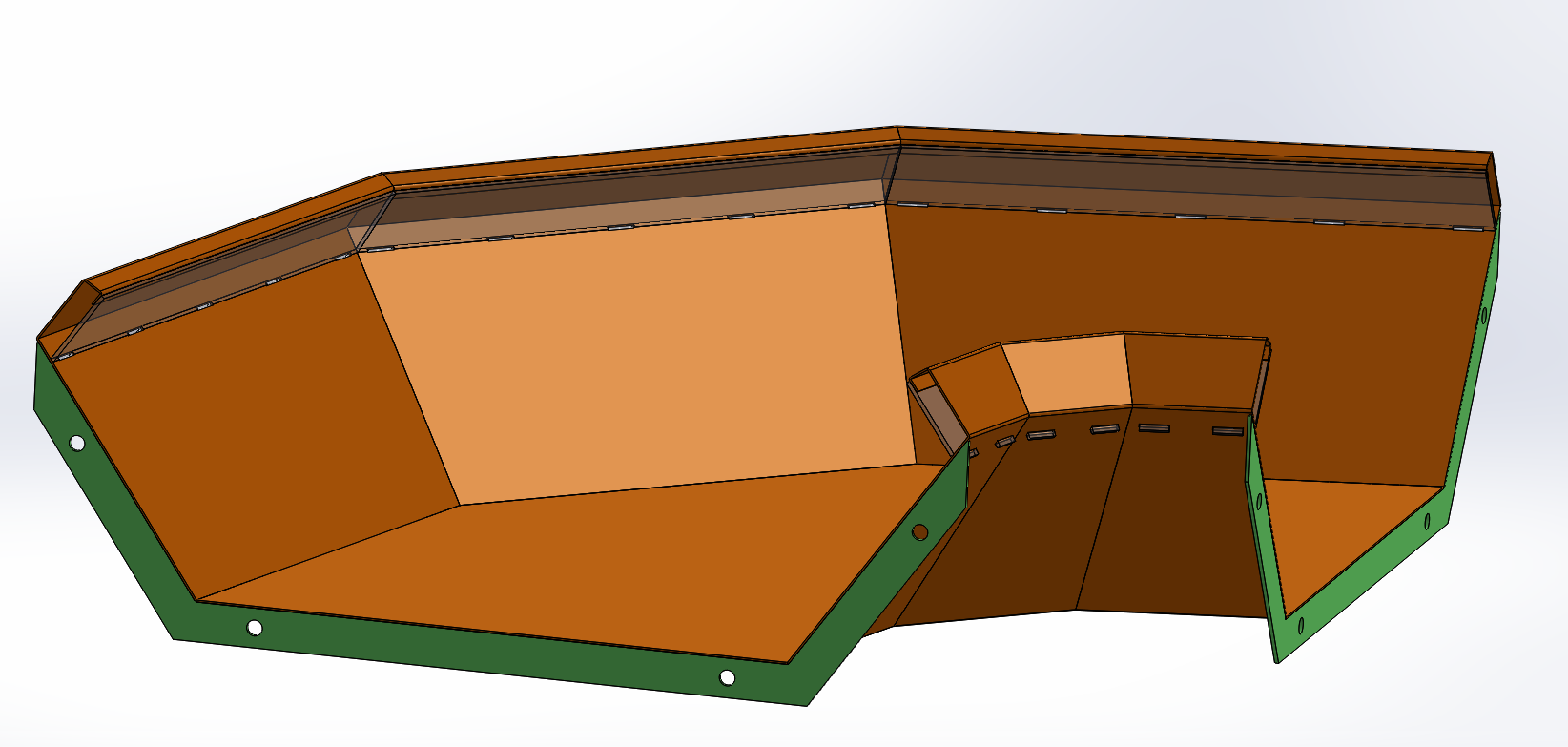
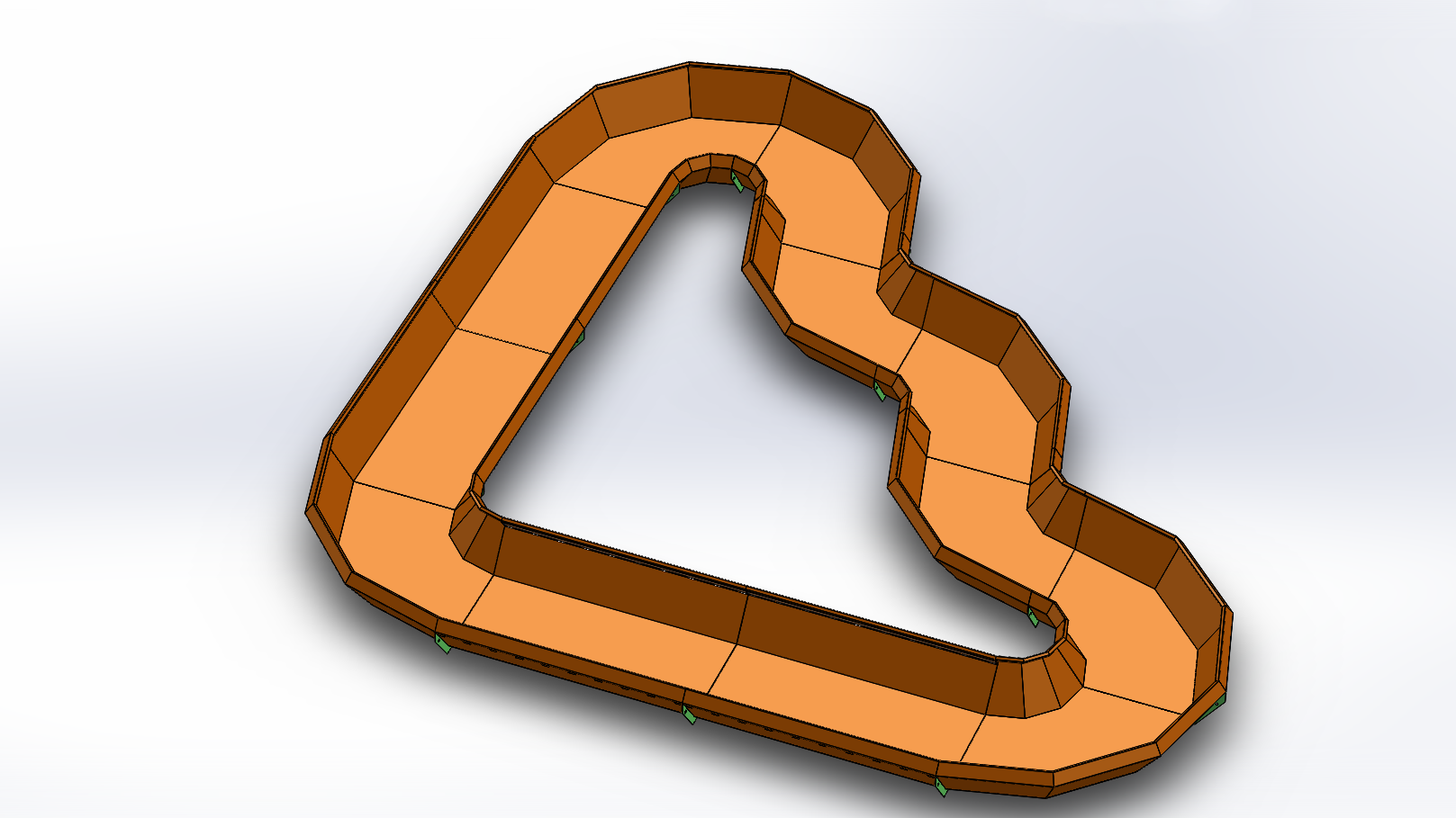
The track is completely modular and can be reconfigured according to any size (within the limit of the construction elements).
Like some existing virtual racing games, the pilot/player can catch extras that can be found during the race (upgrades, downgrades). Some examples are weapons selection and activation or modifying the armor.
All pilots/players are network connected, not only because that is a game requirement for the system to work, but also to share rankings and statistics like in a real life game.













 Cory
Cory

 Ian Charnas
Ian Charnas