 Sam Pullman
Sam PullmanOverview
Common shortcomings of portable Bluetooth speakers on the market include uninspiring bass and the inability to fill a room with sound. Our aim is to design a portable Bluetooth speaker with powerful bass that can sync with several other Bluetooth speakers. There are tons of Bluetooth speakers available of varying price and quality, but few with good frequency response below 100Hz. Most support connection with a single phone or computer, but few are capable of more than that. We haven’t been able to find a single one that combines this connectivity, portability, and low base at a reasonable price, so we decided to make our own.
Designing a speaker that improves on these features will be a major challenge. Specifically, designing an optimal enclosure with custom passive radiators, and enabling Bluetooth connectivity with several speakers will be the most difficult (and interesting) aspects of the project. The end result will be a unique speaker that can be used as the main hub for a conveniently portable system.
We are a small startup based in San Francisco called Podo Labs Inc., focused on creating well designed hardware products. Developing this project into a manufacturable speaker (and selling it) is the end goal, but we hope that by making available our research and prototyping steps, we will both inspire people getting into DIY speaker design and elicit feedback from the community.
Notes
A Bluetooth Developer License from Qualcomm is required to exactly replicate the speaker, although we will provide suggestions about how to work around this with off the shelf components.


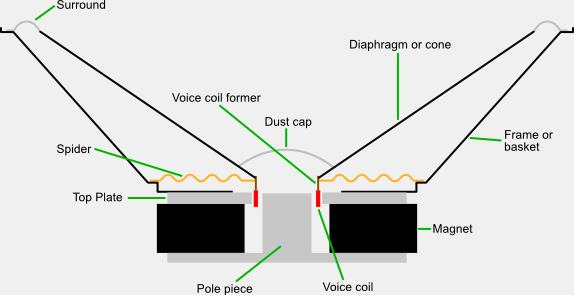 Breakdown of a speaker. Source:
Breakdown of a speaker. Source: 



 stupid
stupid
 Jovan
Jovan
 Jason Cho
Jason Cho
 glenpyeldho
glenpyeldho{kind=link}
{kind=link}
{kind=link}