dannyvandenheuvel
dannyvandenheuvel-
ROBO GUI CONTROLER 'keymapping & com. with real servo! :-)'
08/25/2017 at 00:40 • 0 commentsSome keymapping changes and build-in communication with hardware controller. First glimps :-)
-
SOME BIG CHANGES ON THE DESIGN
08/17/2017 at 20:24 • 3 commentsBecause I wanted a good accurate robot arm I decided to work with some smart servos, calculating the inertia to handle at least 500 gram I needed to work with more servos.
For the base joint I use a 24kg/cm smart servo, elbow, arm and hand I use 2 servos on each side from 12kg/cm and for the wrist and tool head rotation I use 1 servo from 12kg/cm. The gripper will work with a normal servo 10kg/cm.I had to redesign the whole robot arm, a lot stronger and a bit thicker.
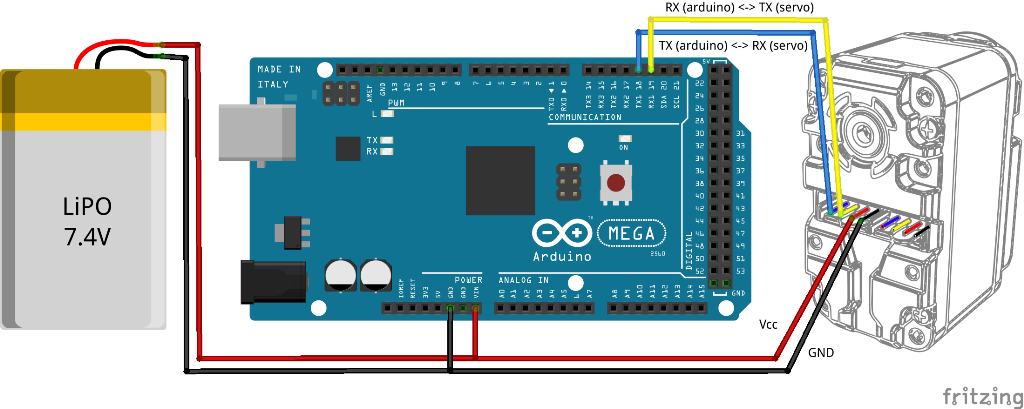
For the people how wanted the old drawings I will put them online if you want to play with it.The power supply has to be upgraded to 7.5v 8.5amp, but it has almost the same dimmension so the hardware controller can be used without any changes.
A quick preview from the robot arm so far.
Tomorrow I will receive the smart servos from HerkuleX, also the leds on the servos will give a special dimension I think!Because the servos work with a serial bus there will be just one or mayby two wires for all of them.
![]()
-
MOVING TO SOME INTELLIGENT SERVOS
08/15/2017 at 14:53 • 1 commentI'm strugling for a while with soft-hardware to do all the movements as close as with my graphical GUI controler. (kinematic movements)
The problem, most servos have a range of 180°, no feedback. If you want to have full 360° you have to get another servo 'continues rotation' here you cannot change the speed. And lots of other anoying things happen when I got further in designing the software.
I searched the web for a few houres and found some intelligent servos, lot of them where to expensive and had some bigger dimensions. But after a couple of houres later I found something that could be the solution! A good price, almost the same dimensions as a normal servo, very smart and 320° degrees of freedom or software changeable to continues rotation. choice between two types of motors 12Kg/cm or 24Kg/cm for this project.
The 12Kg/cm will be the cheapest one and has all the same features like the other one.
Even when you take two of them for the same work it is a lot cheaper so I decided to go for this product, I ordered a few to do some tests, if they will solve all my problems I will change the design with these boys!
I want a robot arm not to expensive, something where you almost can compete with a real robot arm! Something more than a piece of plastic that moves without any precision.See ya when I got my parts and played with it :-)
![]()
It's super easy to connect up to 200 servo on one serial bus.
some specs
![]()
I made a preview of the robot arm with master slave servos to get more power, it has 8 servos DRS-0101(12kg/cm) and for the base 1 servo DRS0201 (24kg/cm)
The benefit of these motors, you can set the torck on and off so you can move the arm yourself and record the feedback position.This could be the new 'SMARTrobo' 8-) when I'm satisfied with the results!
![]()
Another fine feature is the rgb light on the back of the servo that you can command through the serial bus.
A small movie shows the driving of 8 motors with 1 serial cable connected. -
ROBO ARM INSIDE GUI CONTROLER
08/11/2017 at 17:47 • 3 commentsA quick preview of 6DOF robotarm inside Robo GUI controler! coming soon...
-
THE BASE TURNING AROUND
08/10/2017 at 13:47 • 0 commentsThe base turning around his axe very smoothly :-)
-
'BASE' FINALYSED! ONLINE
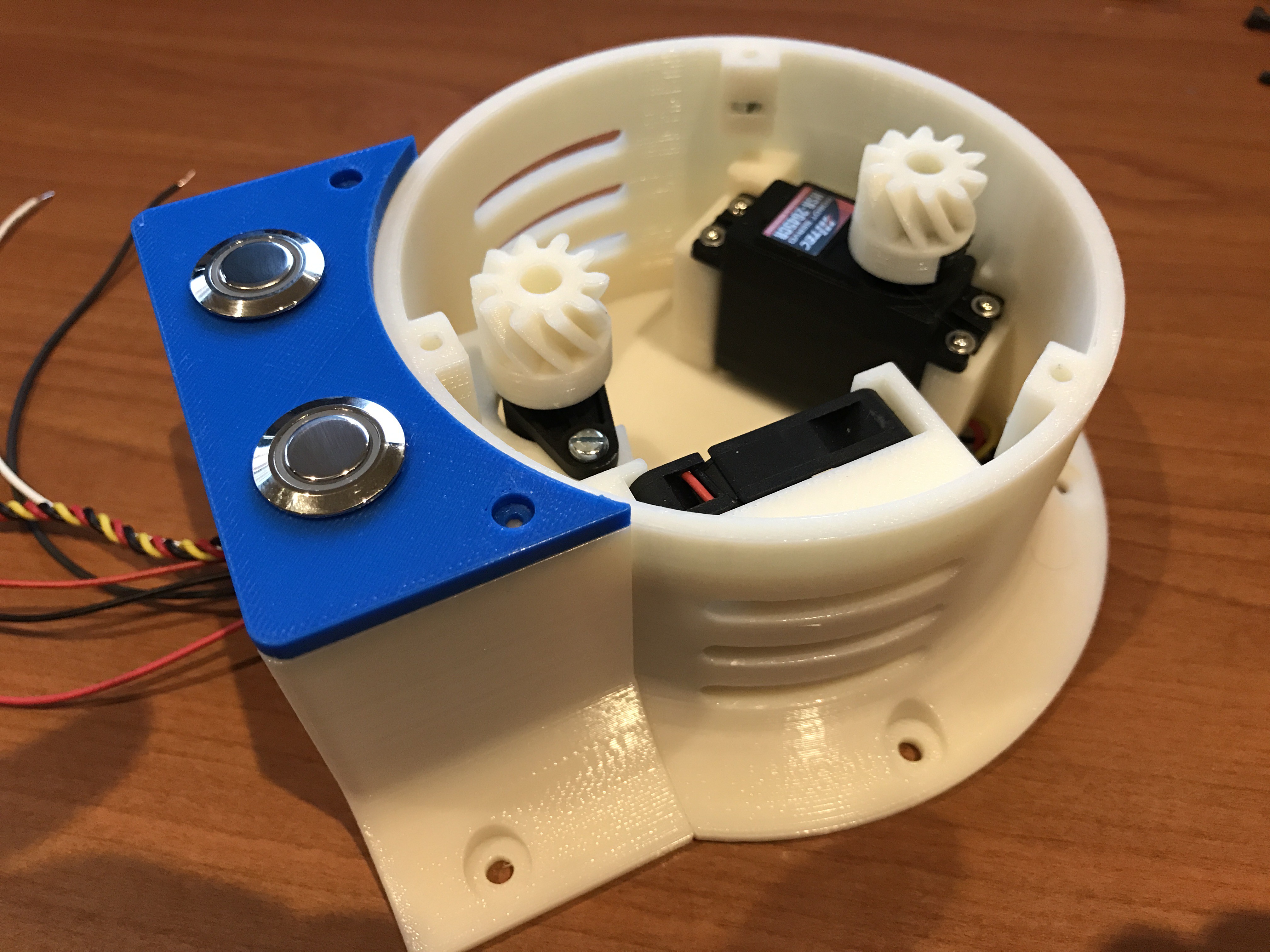
08/06/2017 at 20:22 • 0 commentsAll parted base printed, assembled and testet, passed!
parts are online.![]()
Motor and angle sensor geared.
![]()
Main gear assembled
![]()
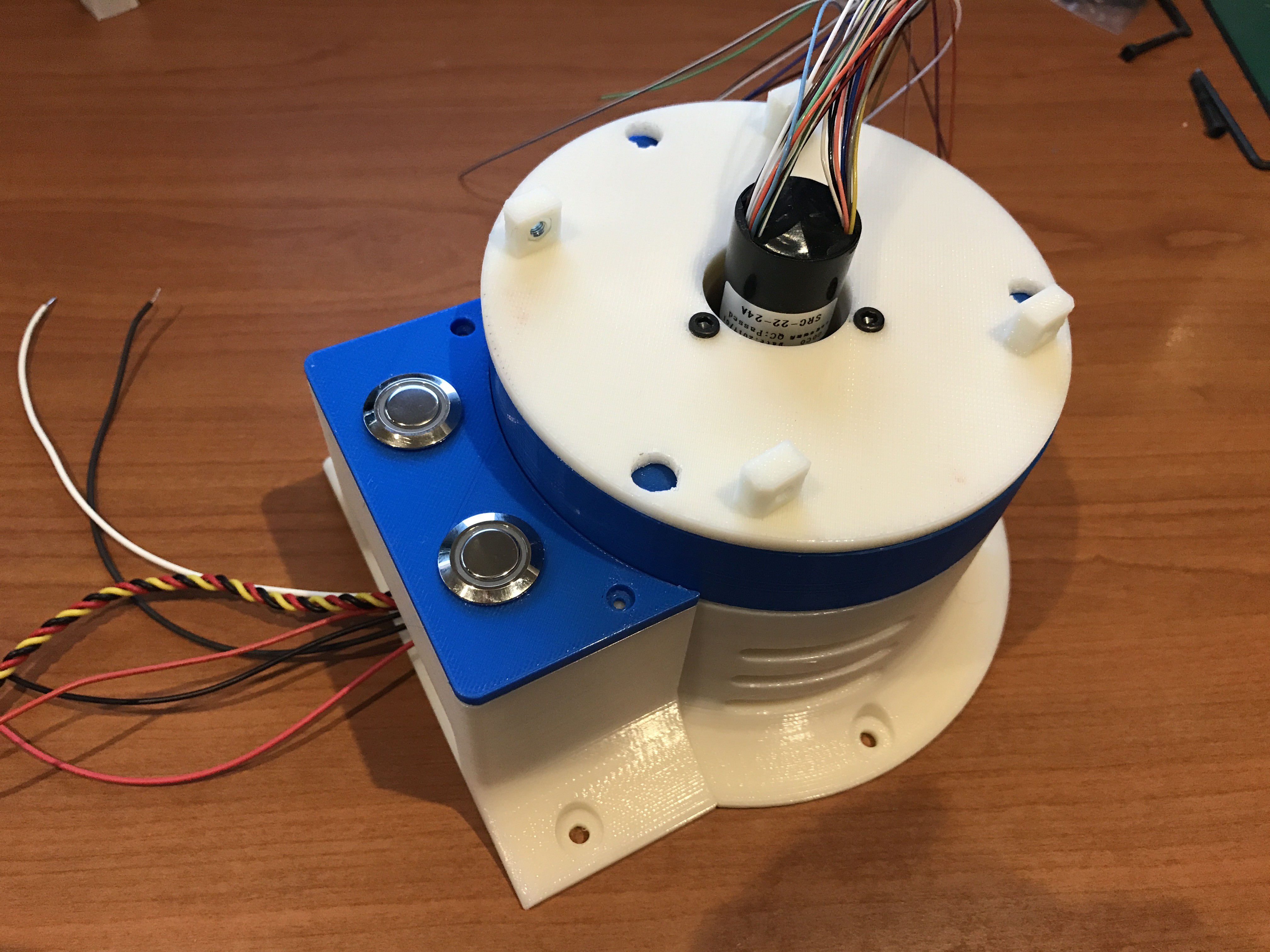
Slipring assembled
![]()
Base ready to turn around :-)
-
FIRST PRINT PARTS 'THE BASE'
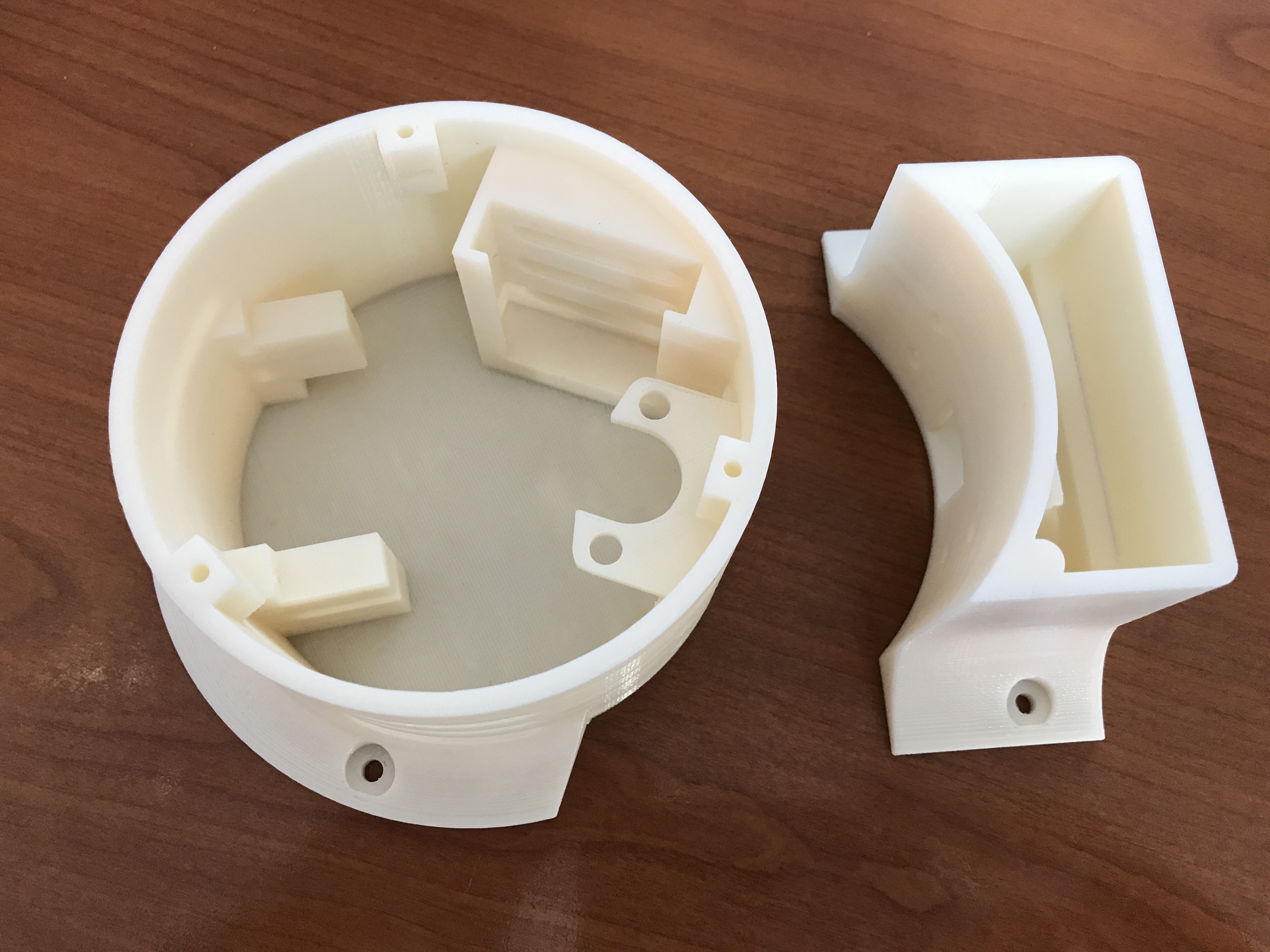
08/06/2017 at 11:24 • 3 commentsThe first pieces are printed, looking good!
![]()
![]()
With some components assembled.
-
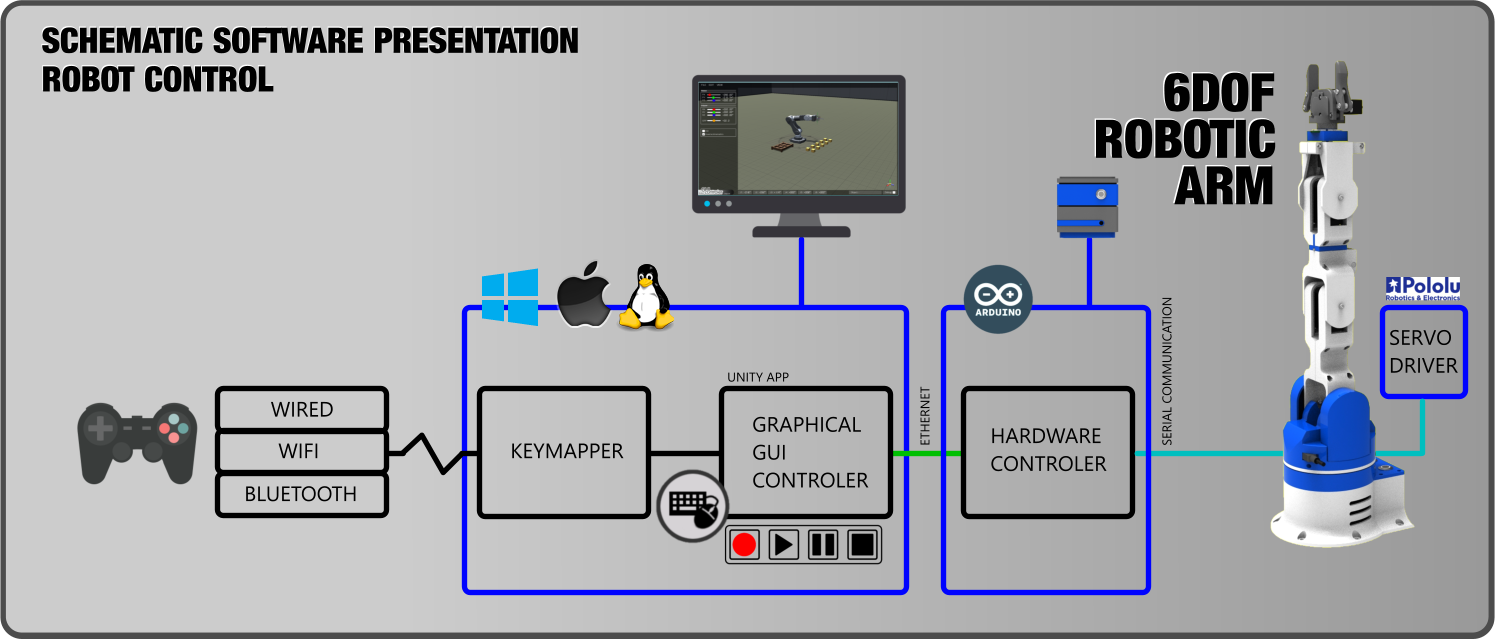
Robot software routing
08/05/2017 at 11:53 • 0 comments![]()
This is the way how everything has going to work to move the robot arm.
It will be compatible for the Thor+ project.
Manual full kinematic movements has been almost ready to release!
Recording en playing senarios will be comming very soon after I printed and tested the hardware robot arm.
Because the gamepad controller will be connected to the computer you can pick any controller that you want, wired,wifi or bluetooth controled. If you want to move with keyboard strokes, no problem. :-)
There will be a plugin IO module later on where you can attach digital in and or output to interact with the robot arm! The story never ends... -
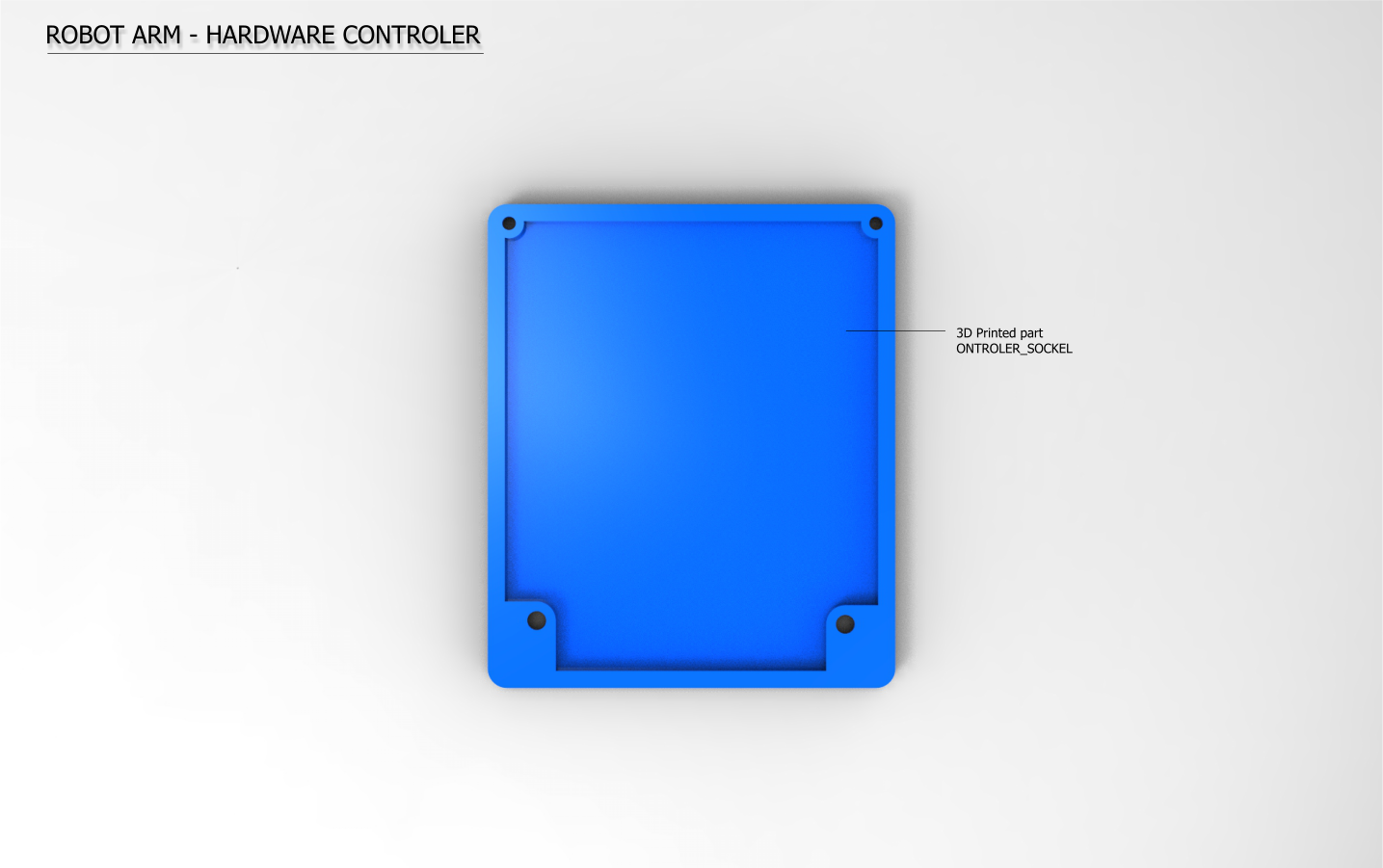
BUILDING 'HARDWARE CONTROLER'
08/03/2017 at 06:40 • 1 commentDrawing sheets to build the hardware controler
![]() The sockel
The sockel![]() The body with power supply and ventilation
The body with power supply and ventilation![]() The magic black layer
The magic black layer![]()
The middle with the arduino electronics
Arduino Mega board 2560
Arduino ethernet shield 2
Power button
DB15 male chassis connector
![]()
The second magic black layer :)Fornt
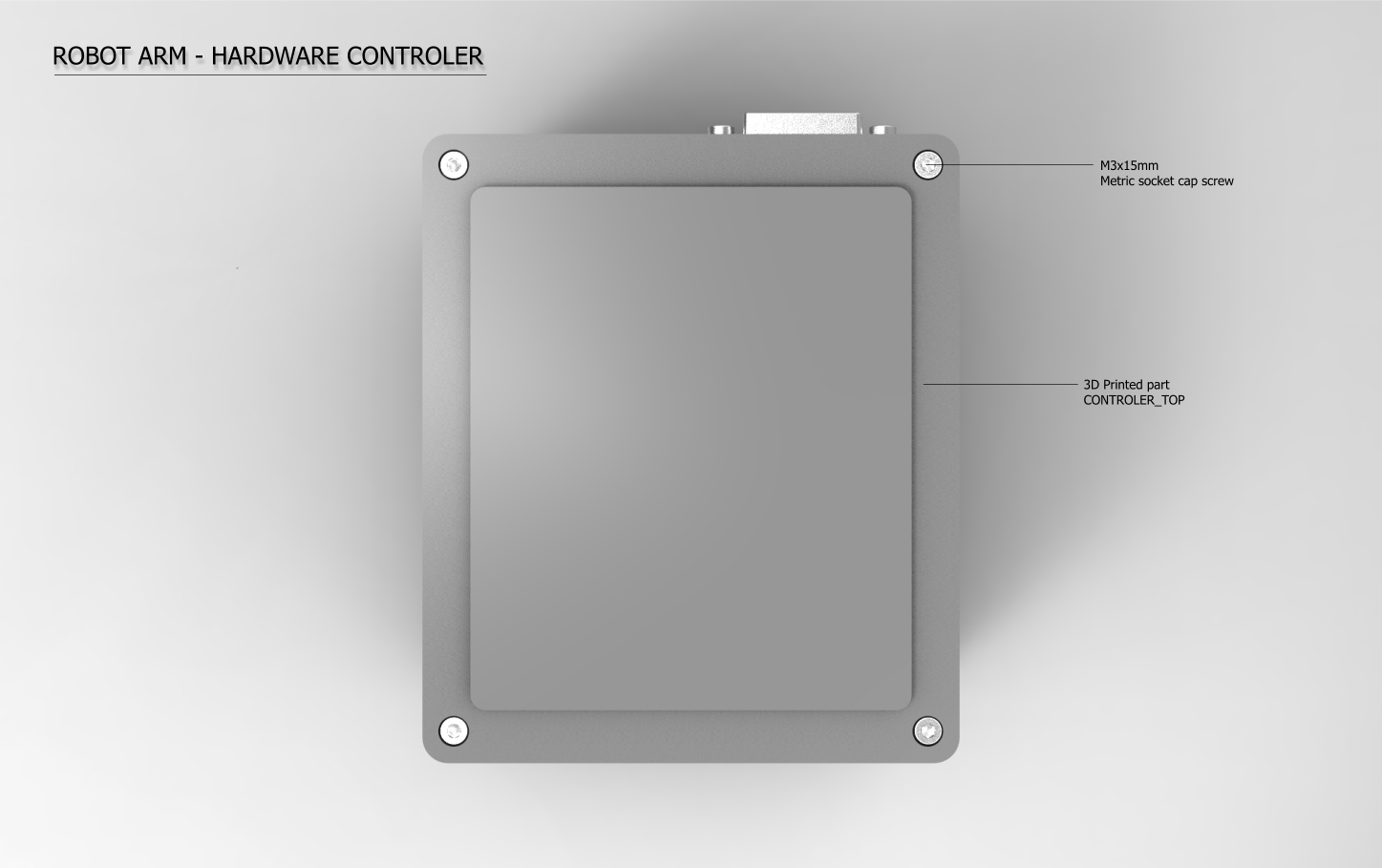
![]() The top cover
The top cover![]() Front view for the controler
Front view for the controler![]()
Rear view of the controler
-
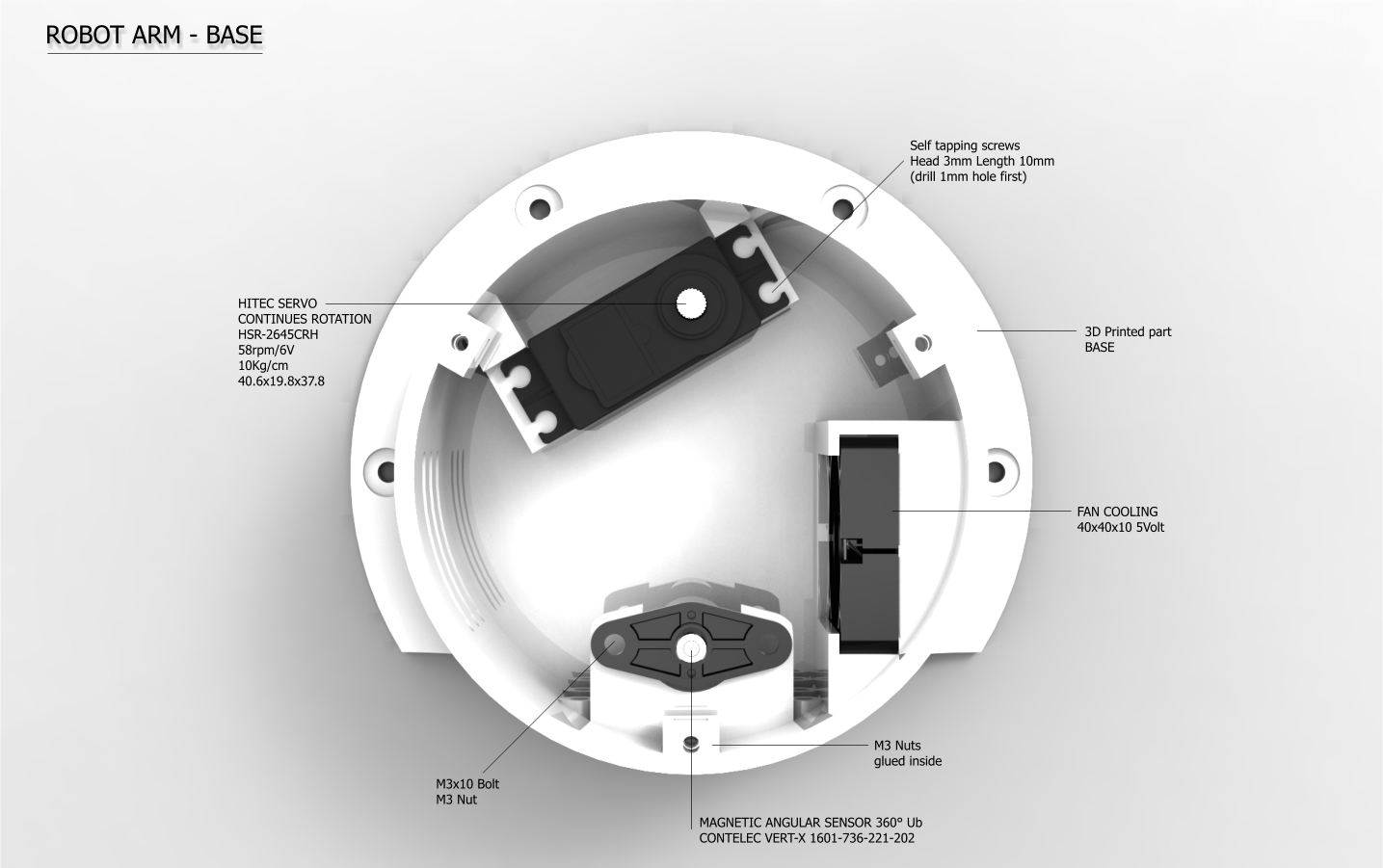
BUILDING SHEETS BASE
08/02/2017 at 19:17 • 1 commentAll drawings for building the base
![]()
The main base with his components
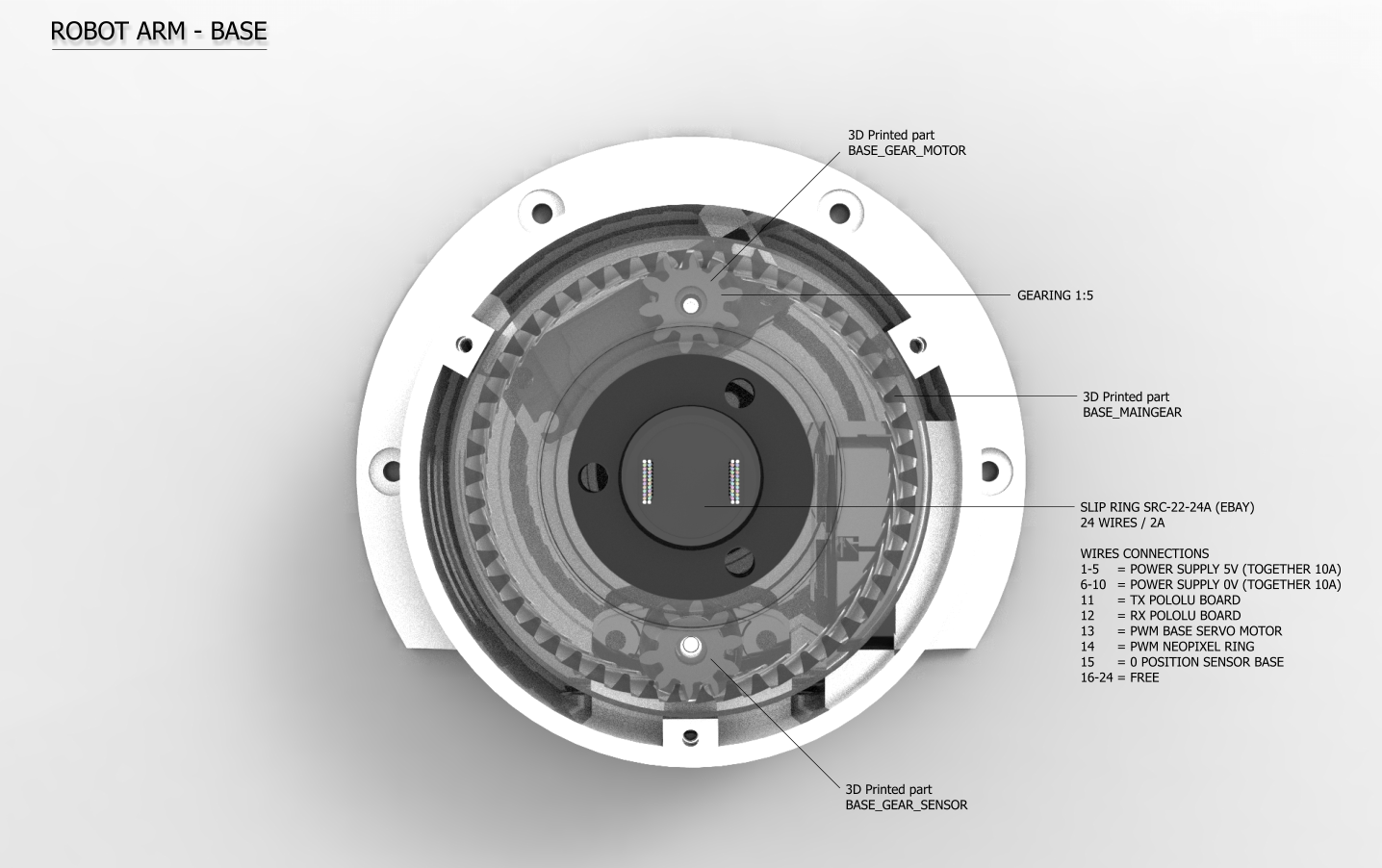
![]()
The gearing and slipring
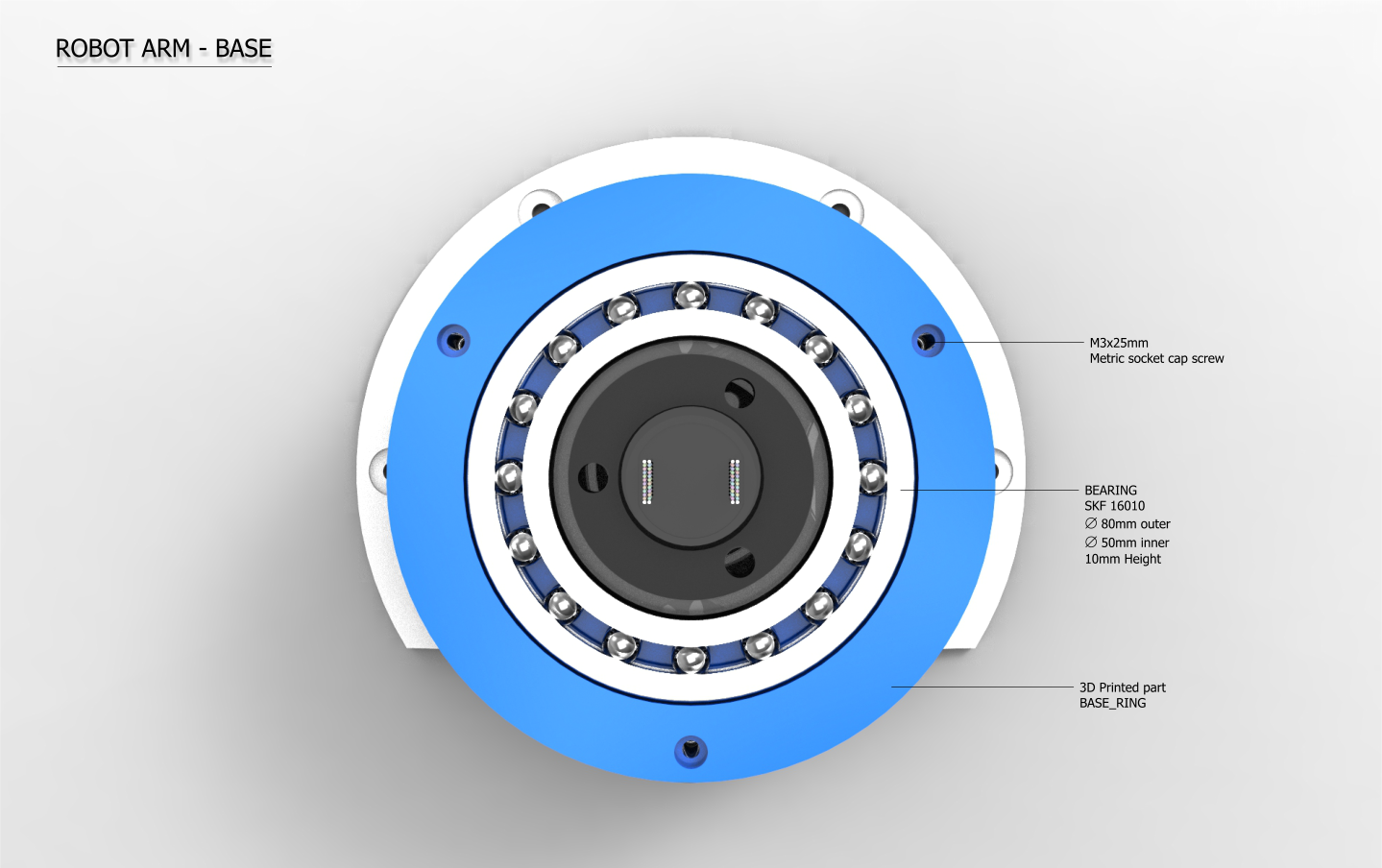
![]()
The bearing
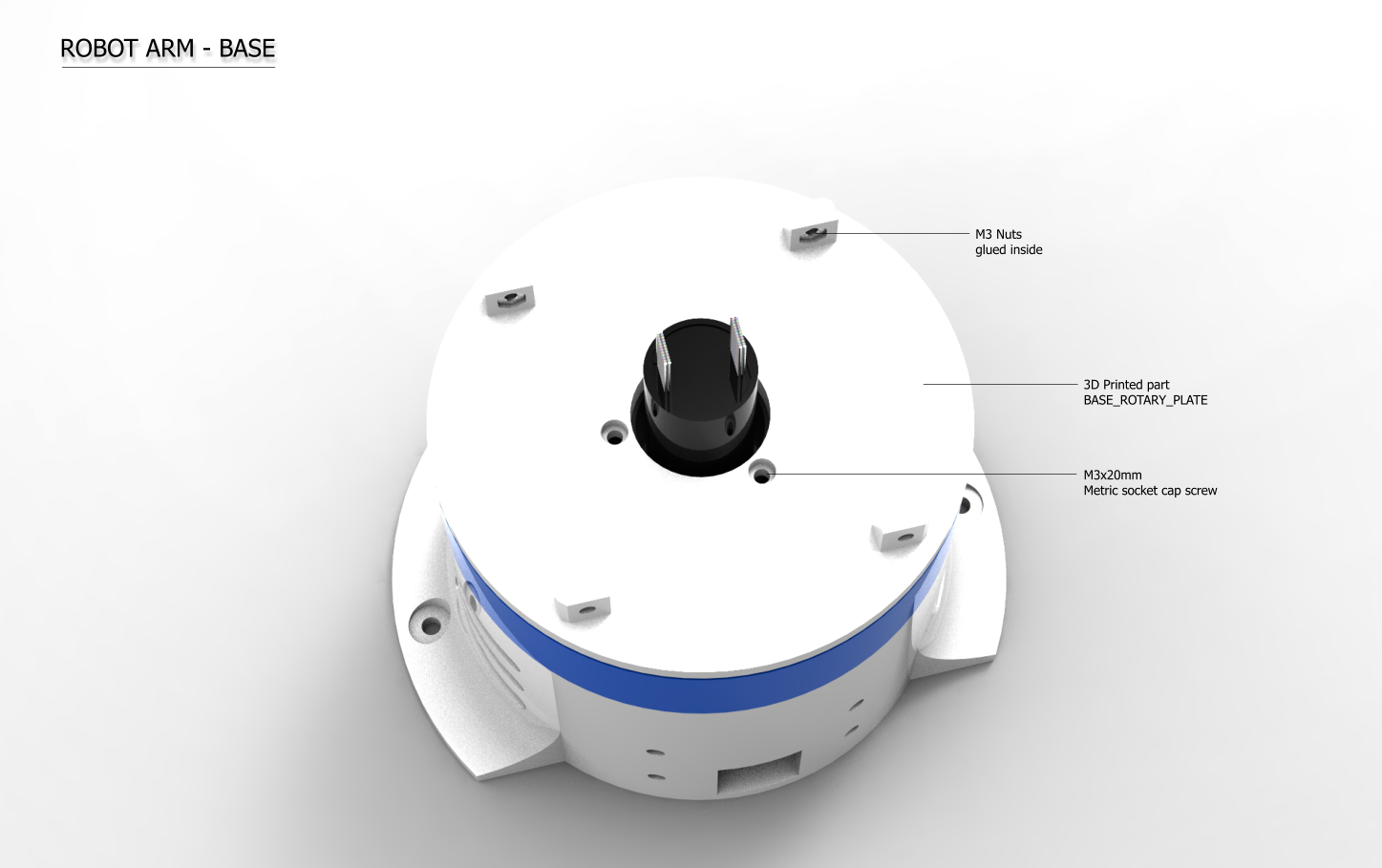
![]()
Finally the top plate






 The sockel
The sockel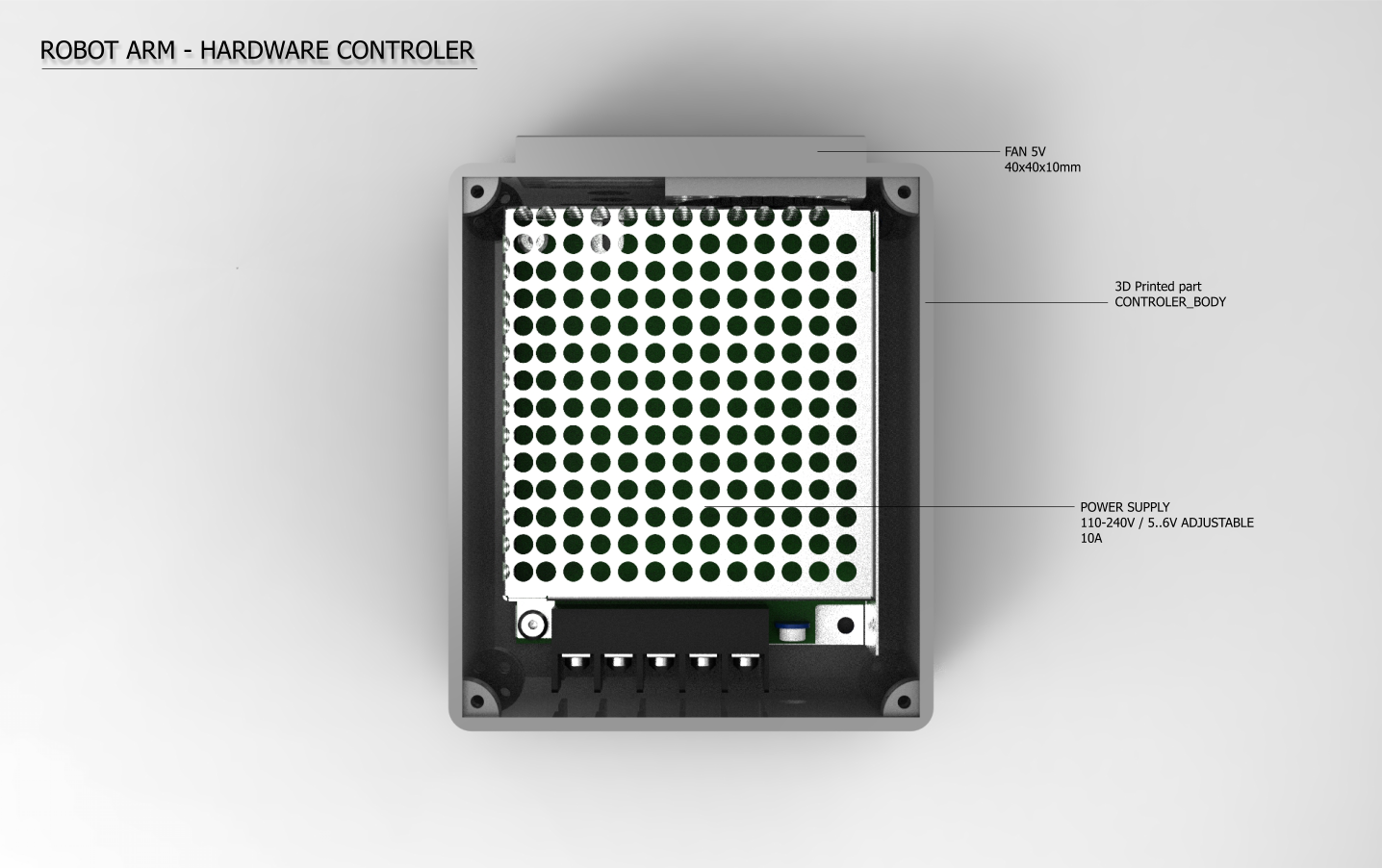 The body with power supply and ventilation
The body with power supply and ventilation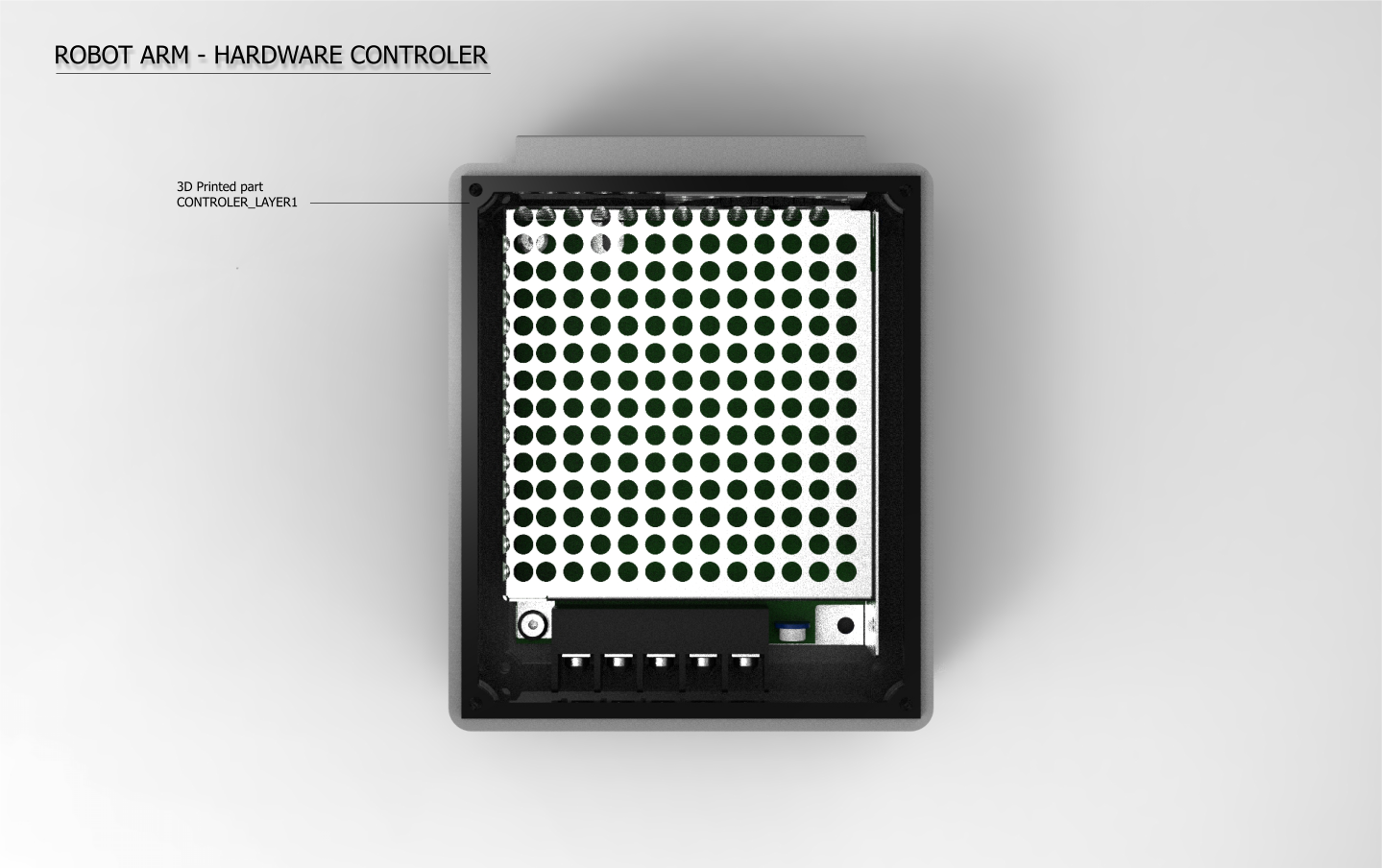 The magic black layer
The magic black layer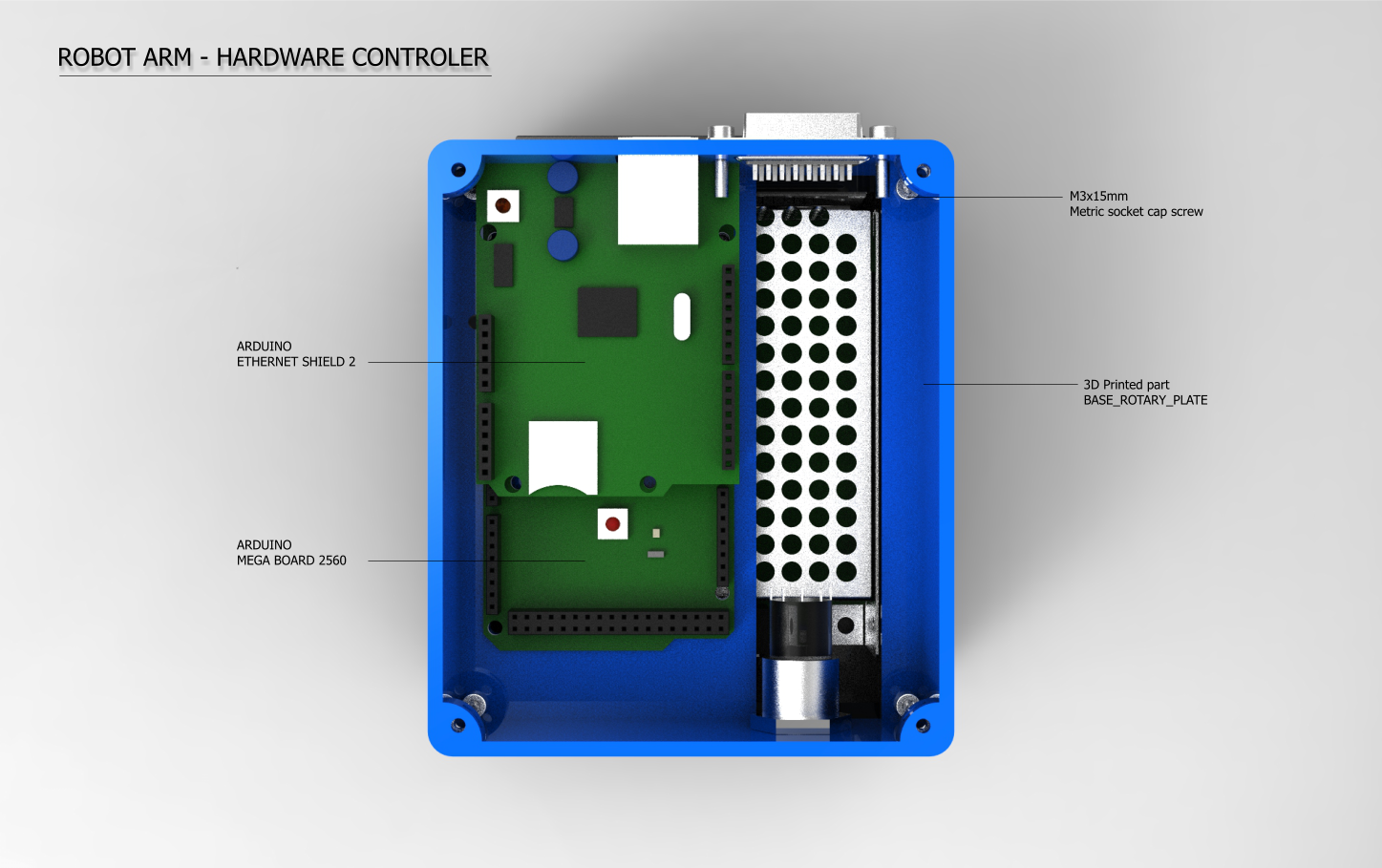

 The top cover
The top cover Front view for the controler
Front view for the controler