 Sepio
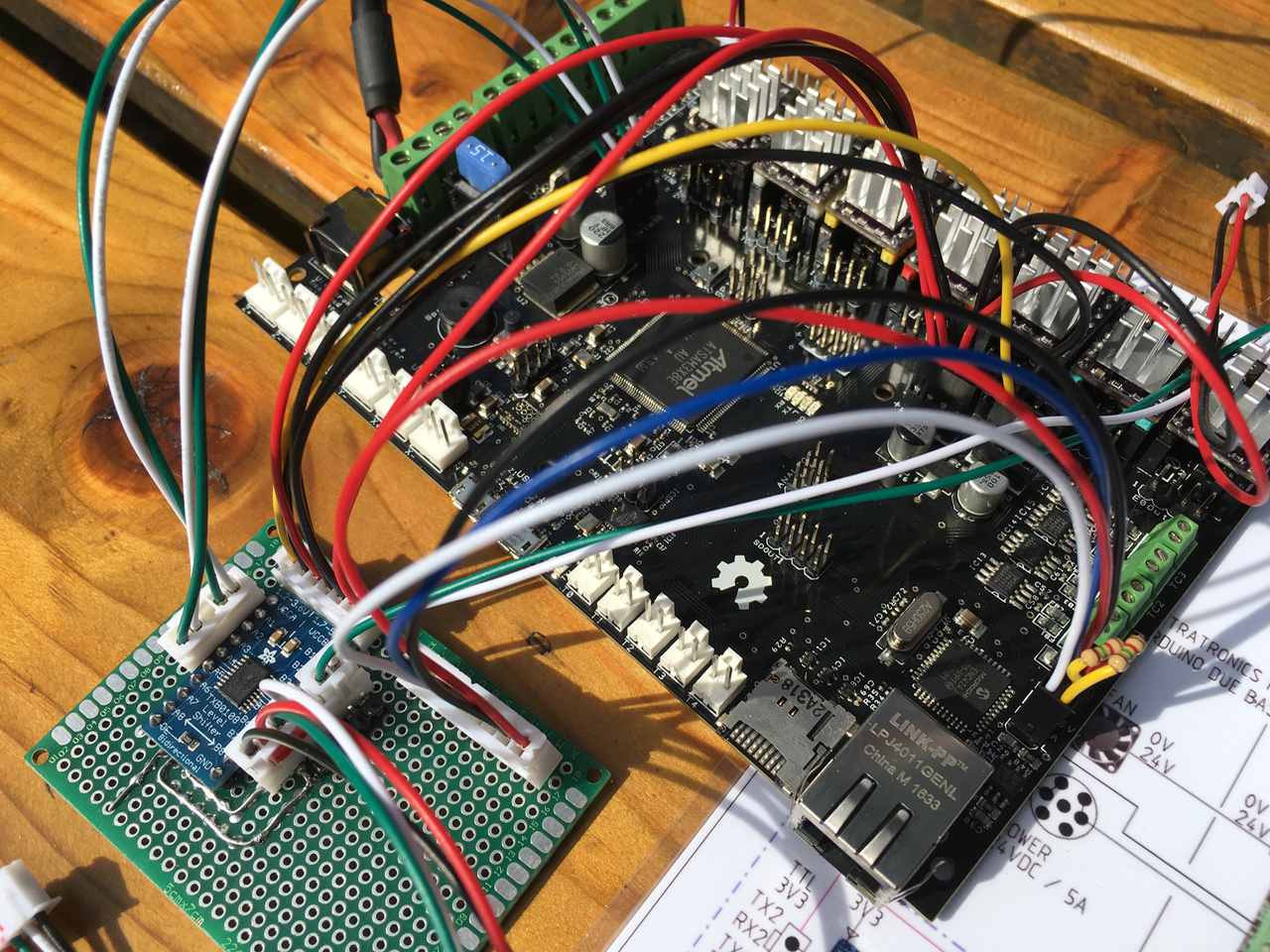
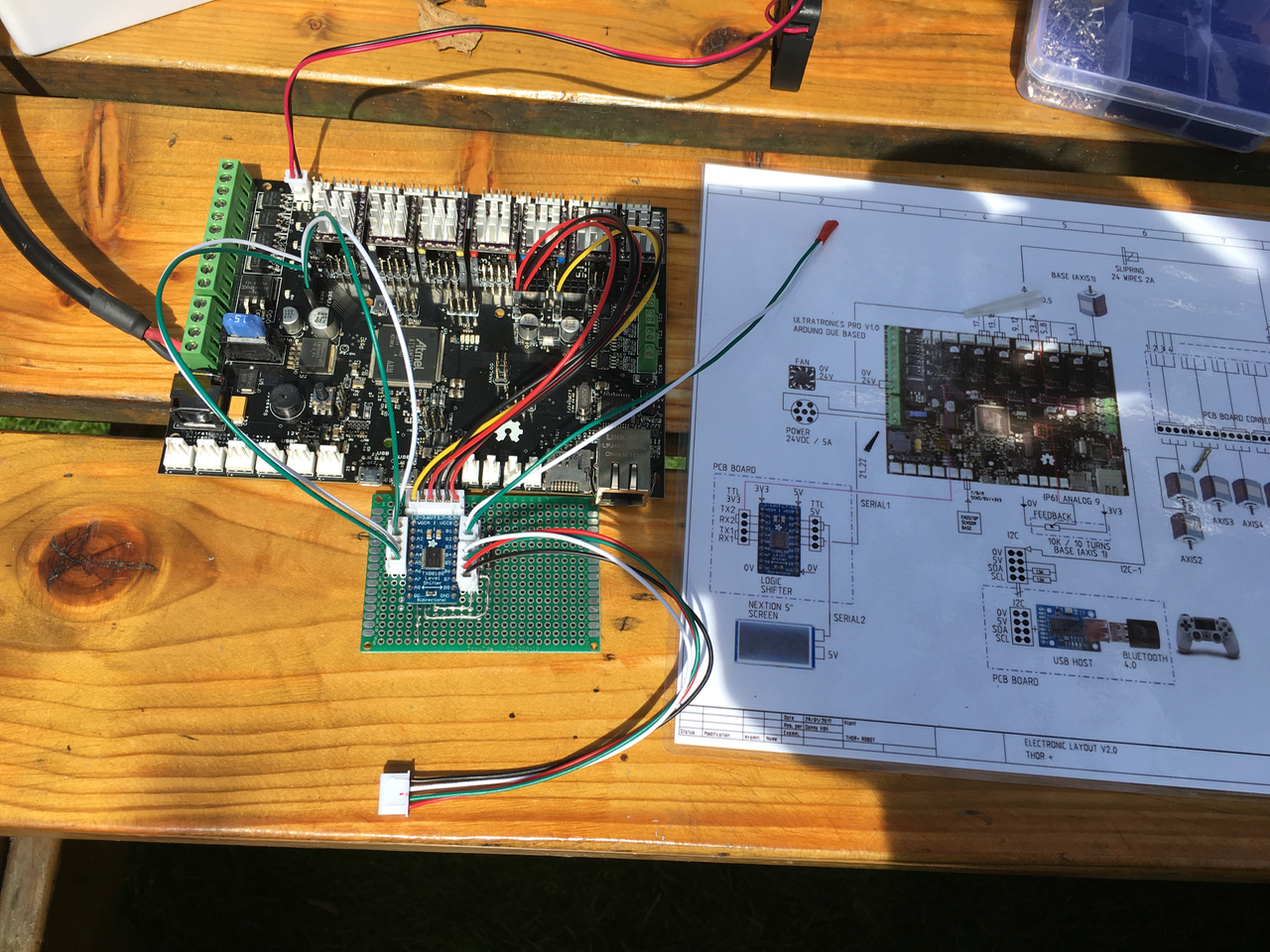
SepioThe Ultratronics Pro board arrived. I made a few connectors and a custom pcb for the logic level shifter. On the right side of the board there is room for the USB host.
For the wires I used the following colors
- Black = 0V
- Red = 5V
- Yellow = 3.3V
- Green = RX
- White = TX / Data
- Blue = Clock
The electronic sheet Danny provide was very useful.
I also fitted the Polulu drivers with (different colored) pin headers. I followed the guide to set the current limit. The right driver is set to 2A. The other ones are set to 0.4A.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.
Hi Sepio,
Great work, thank you, I'm following your project and will do similar step by step guide for others to refer.
Did you ever get the answers on this questions?
Best,
Naturobotic
Are you sure? yes | no
- I also would like to know on which software library or firmware your robot arm is based. Angels version uses GRBL but that doesn’t work on an arduino Due.
They didn’t use an existing software library. I am also still learning how everything works in a piece of arduino test code. I am now busy reading the data from all the sensors. It’s a steep learning curve and it doesn’t go fast. But I like to learn all that new stuff.
- What for a kind of potentiometer do you use. On your project pages you talk about 10K 10 turn, 5K 10 turn and 5K 5 turn. I ordered the first two and I am unable to find the last one.
I replaced them with a rotary encoder. This way the arm is able to rotate freely.
https://hackaday.io/project/26341-building-and-improving-the-thor-robot-arm/log/71425-day-20-latest-version
- I did read something about shielding the serial wires between the Ultratronics and the arduino and Nextion display to reduce communication errors. Is this correct?
dannyvandenheuvel wrote 08/15/2017 at 16:47 • 1 pointShielding cables:
Generally shielded wires are only grounded on one end. Splicing shouldn't be a problem.That depends. General rule is:If you want to keep EMI inside the cable, ground both ends. If you want to keep the EMI outside the cable, ground one end.So if a signal is small in magnitude (think audio signal like microphone circuit) ground one end to keep interference from outside corrupting the signal inside the cable (including interference created by a ground loop if you were to ground both ends).If you are connecting something like a strobe signal (large AC signal) go ahead a ground both ends as goal is to make sure what is inside doesn't radiate to the outside (groundloop induced corruption of the large strobe signal is a non-issue).In the case of an RS-232 signal you have a fairly large signal [5V or more Peak to peak) running at almost 10KHZ baseband frequency (or more)]. Radiated harmonics could cause all sort of issues. Hence, ground both ends.
I grounded one side on the ultra board. No problems detected after it.
- Is the nextion display able to use the 5v power from the Ultratronics board or do I need a 24v to 5v step down voltage regulator?
It uses a separate power line from the external power supply .
https://hackaday.io/project/26341-building-and-improving-the-thor-robot-arm/log/70085-day-17-power-supply-enclosure
Are you sure? yes | no
I put this in a separate topic because it is important.
The Ultratronics board v1.0 can support 24V and 12V, you choose. However realize that when you use a 24V power supply, every connector that has "12V" written on it is now 24V. This is important when you hook up devices, sensors and fans to the 12V. You need 24V fans not 12V.
The 5V stays 5V and the 3.3V stays 3.3V in both cases.
Are you sure? yes | no
Something that may be important to your electronics. In my situation I originally cut the power at the mains voltage. However I pretty fast discovered that the main power supply holds a lot of more energy so the stepper motors did not immediately cut their movement. Especially when you develop your software this can destroy your parts or even worse lose a finger.
So I ended up having a switch between the power supply and the robot so the cut off is instant.
But then came my Nextion display issue. It sucked too much current and the main board could not deliver. I did use the additional 5V of my main power supply. but I noticed that the electronics somehow kept on functioning when I cut the 24V switch.
The final solution is to have a bucks converter that converts the 24V to 5V so when I switch off the 24V both the Nextion, lose power at the same time. The Bucks converter could easily go inside the main compartment that also includes a fan to cool the Polu drivers.
The Polu driver that drives the base motor needs cooling as I have noticed.
Are you sure? yes | no
Hi Sepio,
I'm very glad you jumped into our adventure, I see there has some nice work been done at this moment. If you getting into trouble by adding the feedback don't hesitate to ask for my help, it requires patience and precision. Because I did not want to make any new extra pieces for the mounting of the covers, they should all be pre-drilled without markings to attach to the robot body. Not difficult but you have to keep your mind in mind. :-) The joint axis have to rotate into the potentiometer for art.2 and 3, also this can be tricky, I will made some help on my page one of these days.
I wish you all the best of luck in building this beautiful project.
btw , nice color combination!
In the meantime I am working very hard on the pc software, for the moment I can move the robot by pc software through keyboard and or joypad and can follow the feedback sensors. Comming days the second release will be out with lots of addons in the software, even the arduino software will be made public. At the same time I am writing the manual of it so you can follow every bit I wrote.
The feedback themselfs have to be closed loop with the nesserary pid software.
Can be a little tricky because of the low cost potentiometers, again it's not that high speed where I counting on to make it work good enough.
It's suprising to see the same robot on another place than my own hobby room :-)
See ya!
Are you sure? yes | no
Hi Danny,
Nice to see you here. I thought it would be nice to give a buildlog in return for your and AngelLM’s hard work.
I have a asked you a few questions on your project page. If you have some time to spare could you please answer them:
- I am going to add a fan and ventilation holes to the base. I want to do this before all the wiring is done. Is it possible to share the 3d design files of this base. (I am going to use fusion 360 for this. Fusion 360 is free for home use and I have used it before).
- I also would like to know on which software library or firmware your robot arm is based. Angels version uses GRBL but that doesn’t work on an arduino Due.
- What for a kind of potentiometer do you use. On your project pages you talk about 10K 10 turn, 5K 10 turn and 5K 5 turn. I ordered the first two and I am unable to find the last one.
- I did read something about shielding the serial wires between the Ultratronics and the arduino and Nextion display to reduce communication errors. Is this correct?
- Is the nextion display able to use the 5v power from the Ultratronics board or do I need a 24v to 5v step down voltage regulator?
Are you sure? yes | no