 Dan Julio
Dan JulioTechnical specs:
- Balloon size: 1000g from scientificsales.com
- Helium: ~110 cubic feet
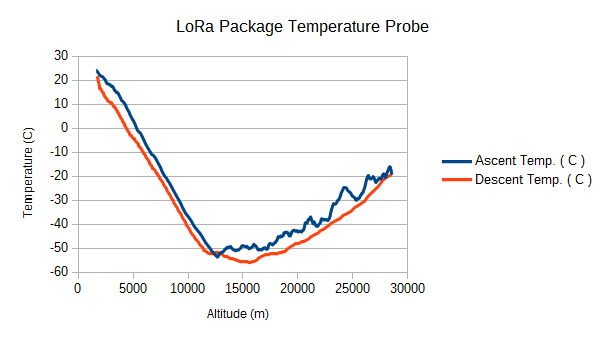
- Estimated Burst Altitude: ~30k meters
- Ascent time: ~2 hours
- Descent time: ~30 minutes
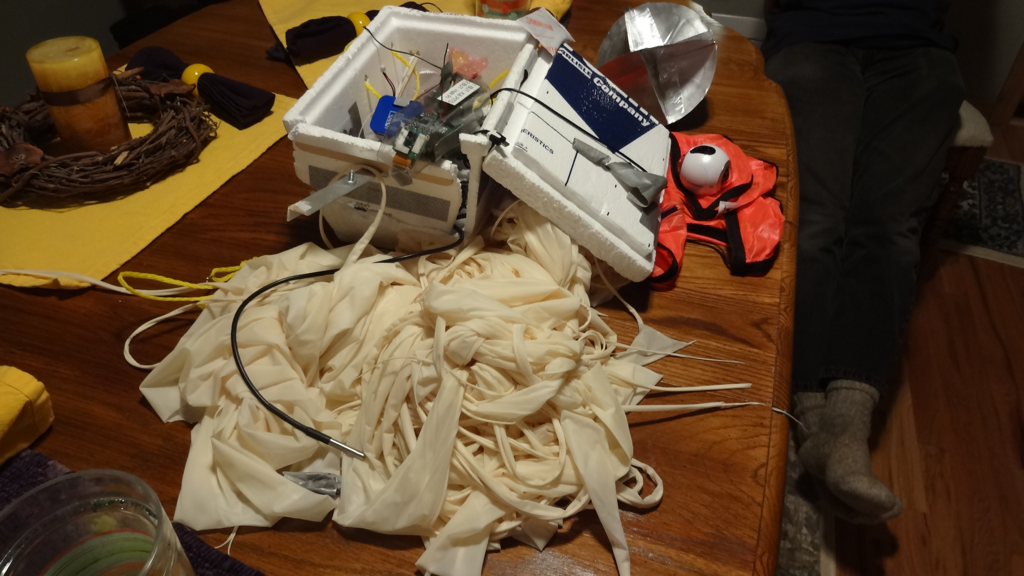
- Payload weight: 1.1 kg
- Parachute: 3 foot diameter
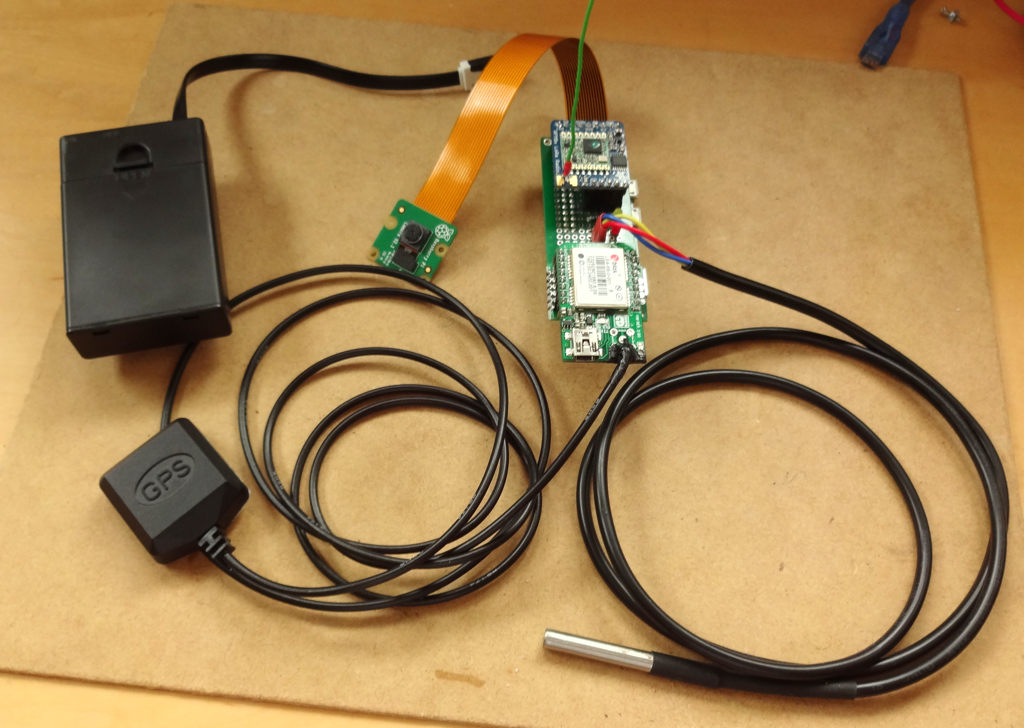
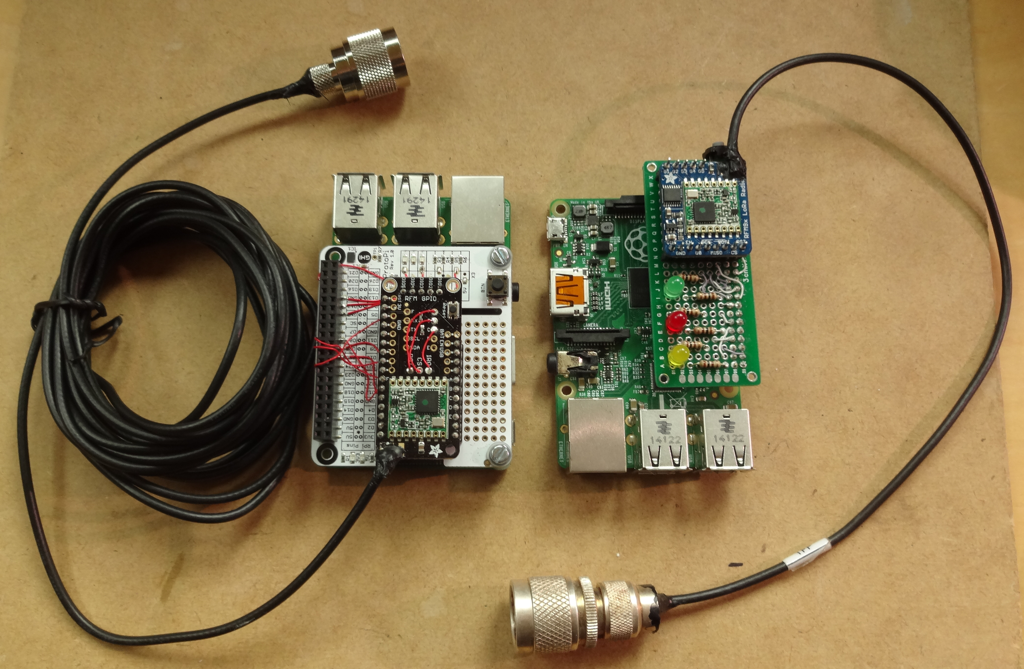
- Cameras: 3 Pi Zero 5 MP (2 video, 1 timelapse), 1 Samsung Gear 360
- Transmitters: APRS 144.390 MHz, custom 40.68 MHz, LoRa 915 MHz
- Power: 2 x 3 AA Lithium Primary packs for 40 MHz and LoRa payloads, 2 AA Lithium Primary pack for APRS, 2 USB Power packs for Pi video cameras and Samsung camera
- Receivers: Handheld 2M transceiver with PC decoder for APRS, 2 LoRa receivers with Raspberry Pi gateways, 1 portable LoRa receiver
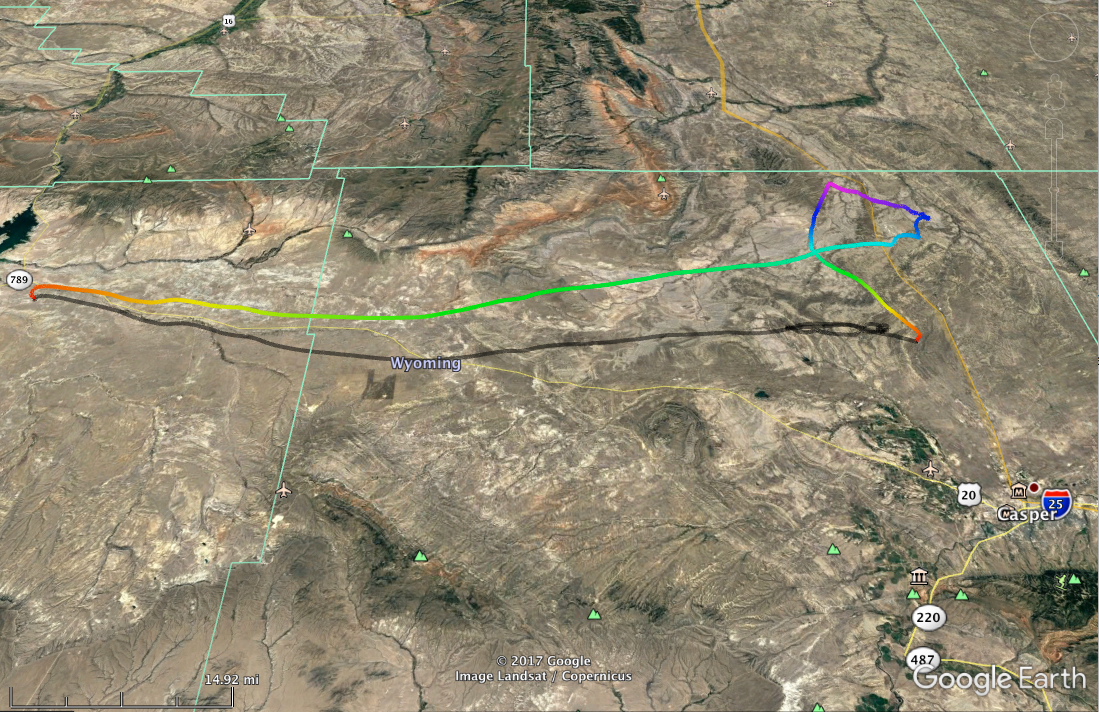
- Launch site: ~43.1299 N, 107.9029 W
- Launch time: around 10:40 AM (totality around 11:40 AM)
- Estimated landing site: north of Arminto, WY
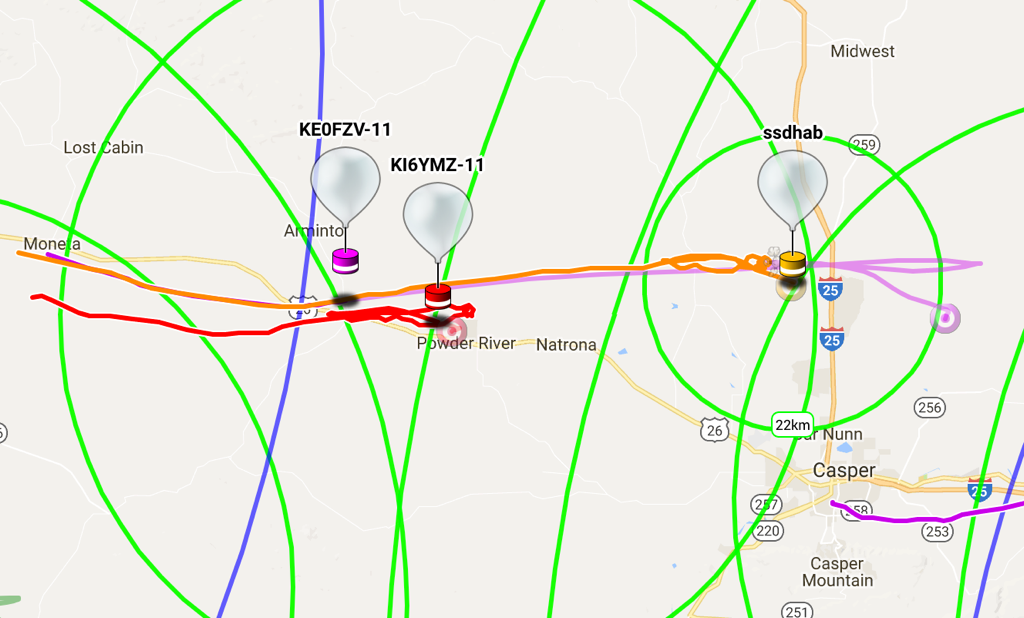
Tracking info:
- APRS: https://aprs.fi (look for KE0FZV)
- LoRa: https://tracker.habhub.org (look for SSDHAB)
- Images: http://ssdv.habhub.org/ (look for SSDHAB tagged images)































 Speedify Labs
Speedify Labs
 Mahmut
Mahmut
 Ben Rockhold
Ben Rockhold
 Brenda Armour
Brenda Armour
We must have been in the air right next to each other! In fact, I see my payload on a screenshot up there ;)
73, KI6YMZ