 Lars Borm
Lars BormThe Haptic Input device enables the user to get digital information of any kind through the skin. Currently we manly use our visual or auditory system to get digital information to our brain. However, in some situations the eyes and ears are needed for other tasks. Luckily, we have many senses, or in other words, we have many routes to deliver input to our brain. The Haptic Input devise does just that by using tactile stimuli to convey the message.
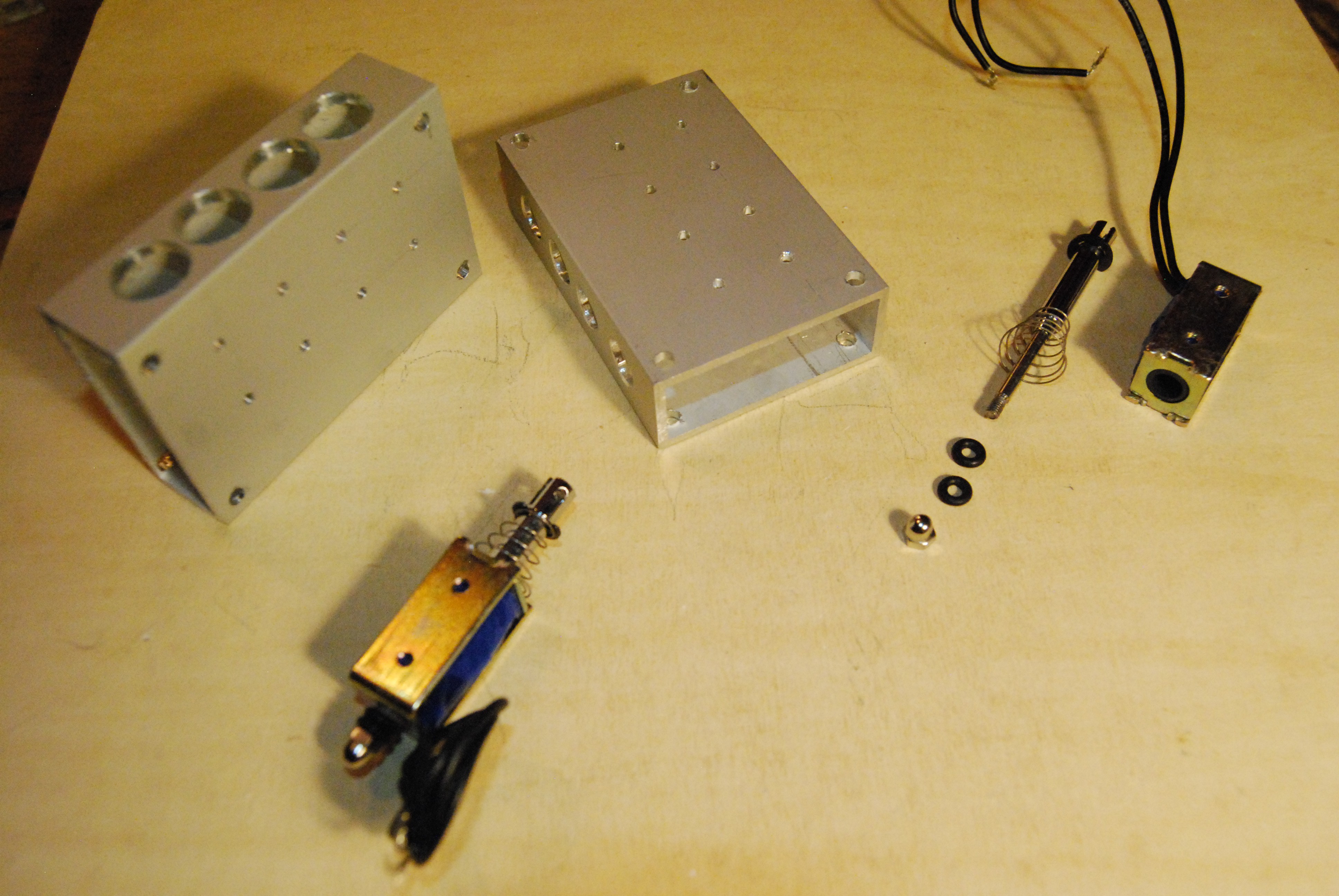
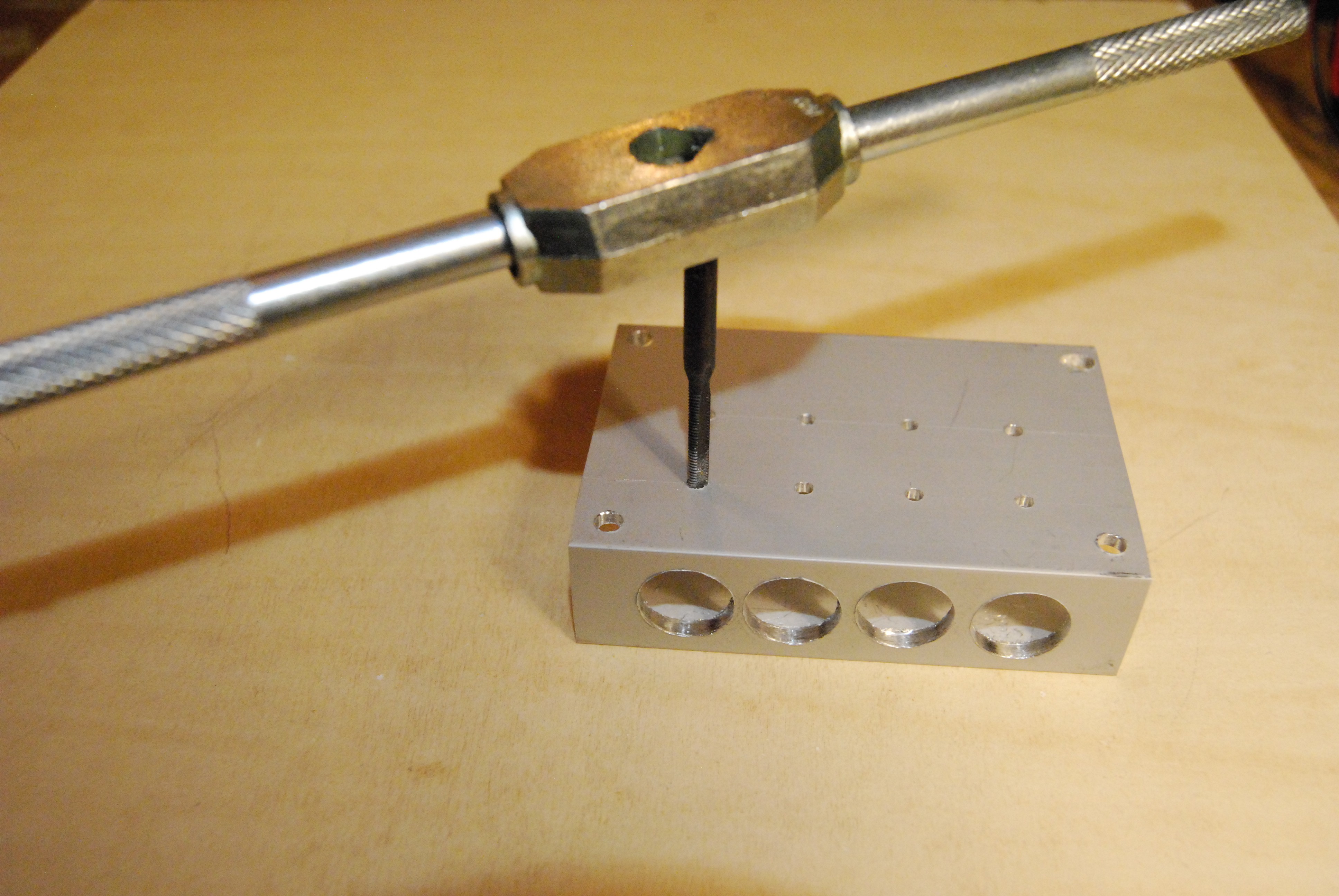
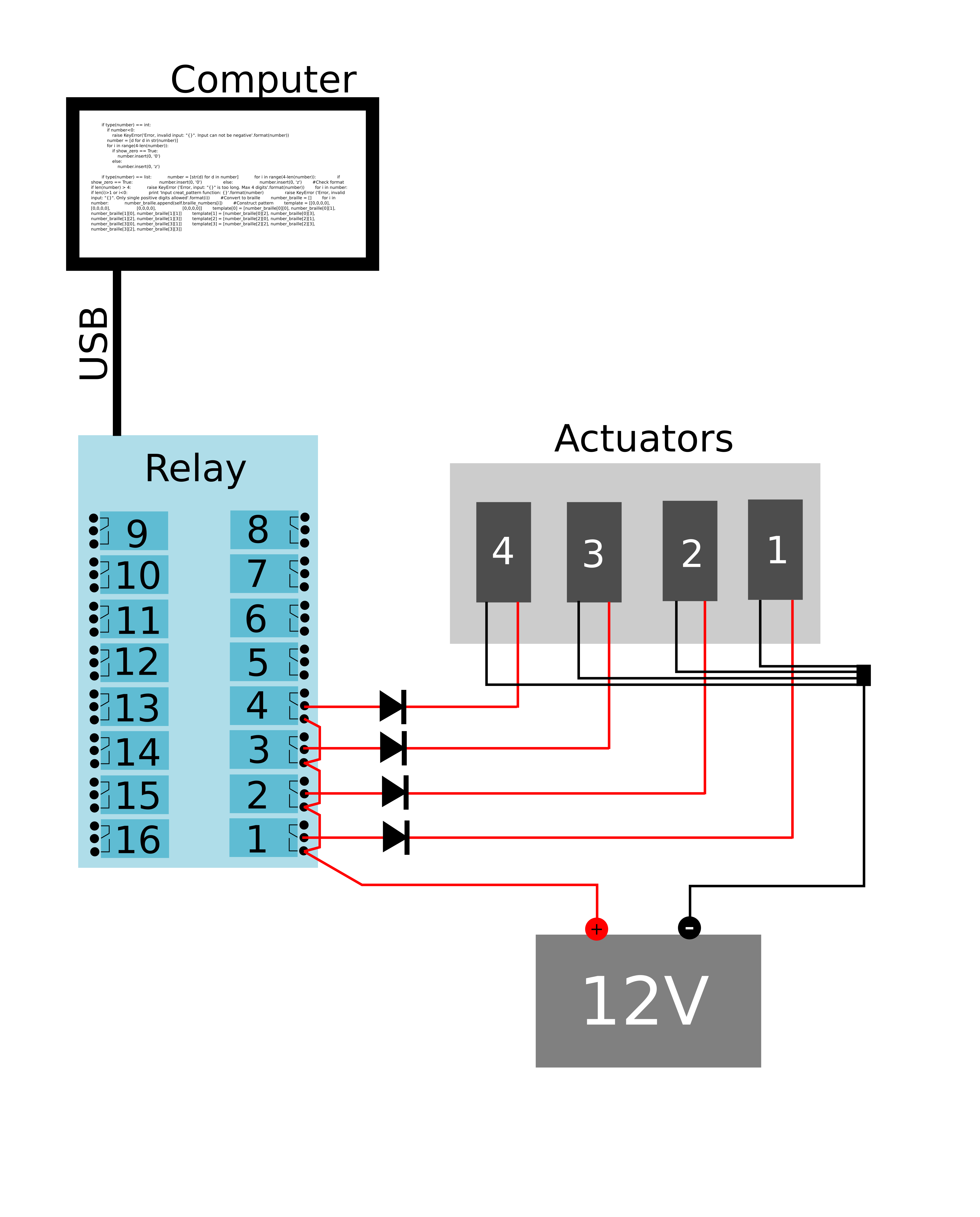
Basically, the Haptic Input device is a line or grid of solenoid actuators that are placed just above the skin. Once they get activated they push down a rod into the skin which the user will feel. Every actuator can be individually controlled to create patterns which corresponds to messages.
In the current implementation 4 actuator in a line can be used to relay one binary number between 0 and 15 to the user. Or 4 of these lines can be used to create a grid of 16 points. With this 16 point grid, up to 4 binary or braille numbers can be made.
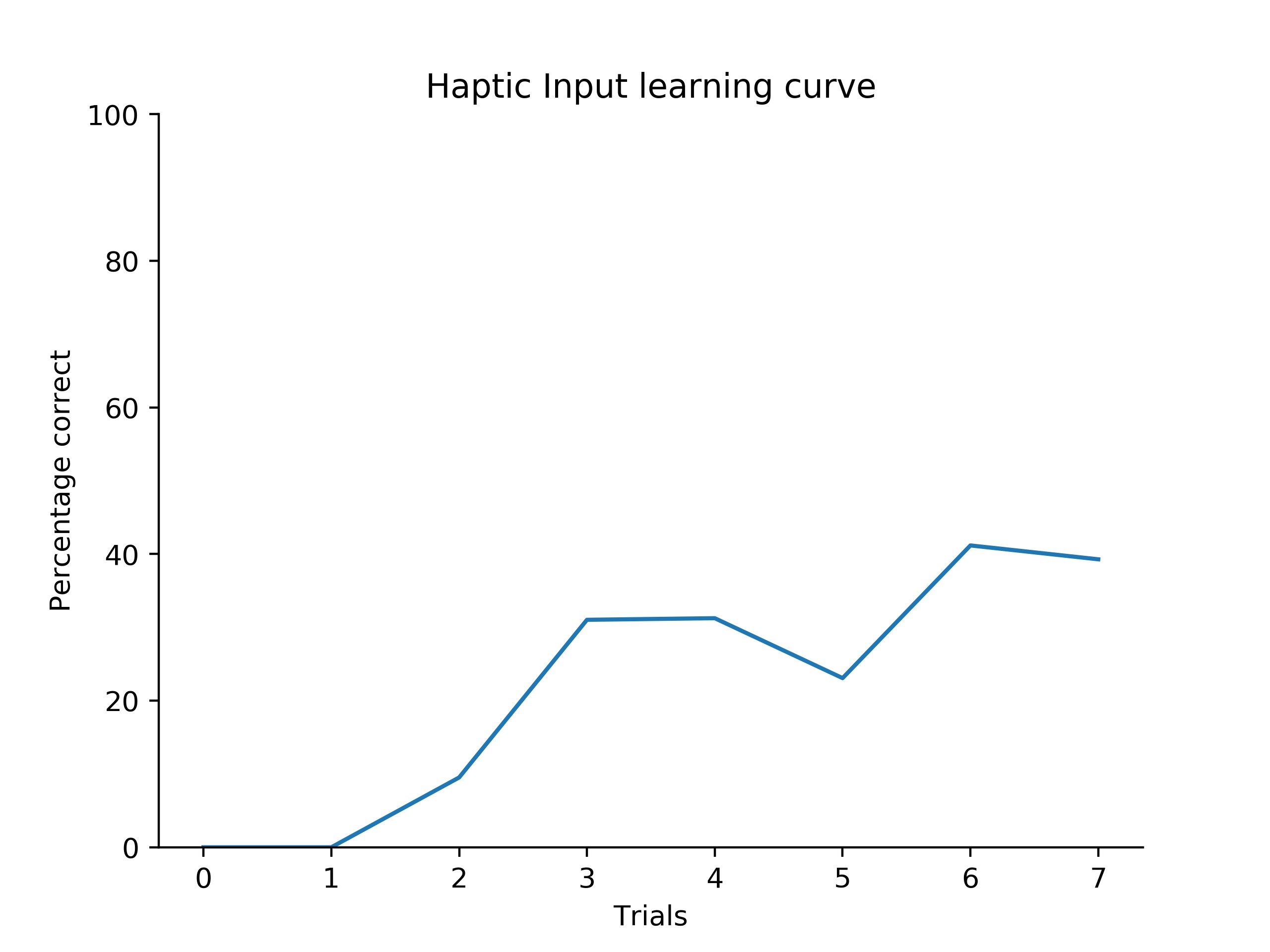
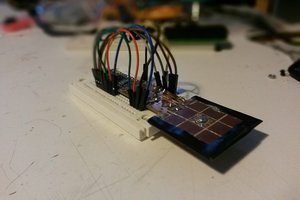
Here the Haptic Input device can be seen in action. A random number is generated and is converted to binary. Then the actuators are activated in that pattern. (sorry for bad video quality)
Of course the Haptic Input device is similar to braille, but what distinguishes it is that it does not use the fingers, so that these can be used for something else. However, the biggest difference is the idea that everyone can benefit from it, not just the blind. It can be used for any kind of digital information in any situation, and it can be hooked up to any other device to meet the needs of the situation.
Like mentioned before, it will be most useful in situation where the eyes are occupied or in situations where it is not practical to look at a screen. For example, how many times have you bumped into something when you were looking at your phone while walking. What if you can get all your text messages without even looking at your phone or having someone reading it to you. Haptic input could be a new way of getting our digital information, in addition to visual and auditory ways.



 bram
bram
 kunal.t2
kunal.t2