-
Some additional components of the system
08/20/2014 at 18:27 • 0 commentsTwo smaller projects are also part of the whole automation system. Both of these devices communicate with the base station over the 868 MHz radio link, with an RFM12 radio transceiver.
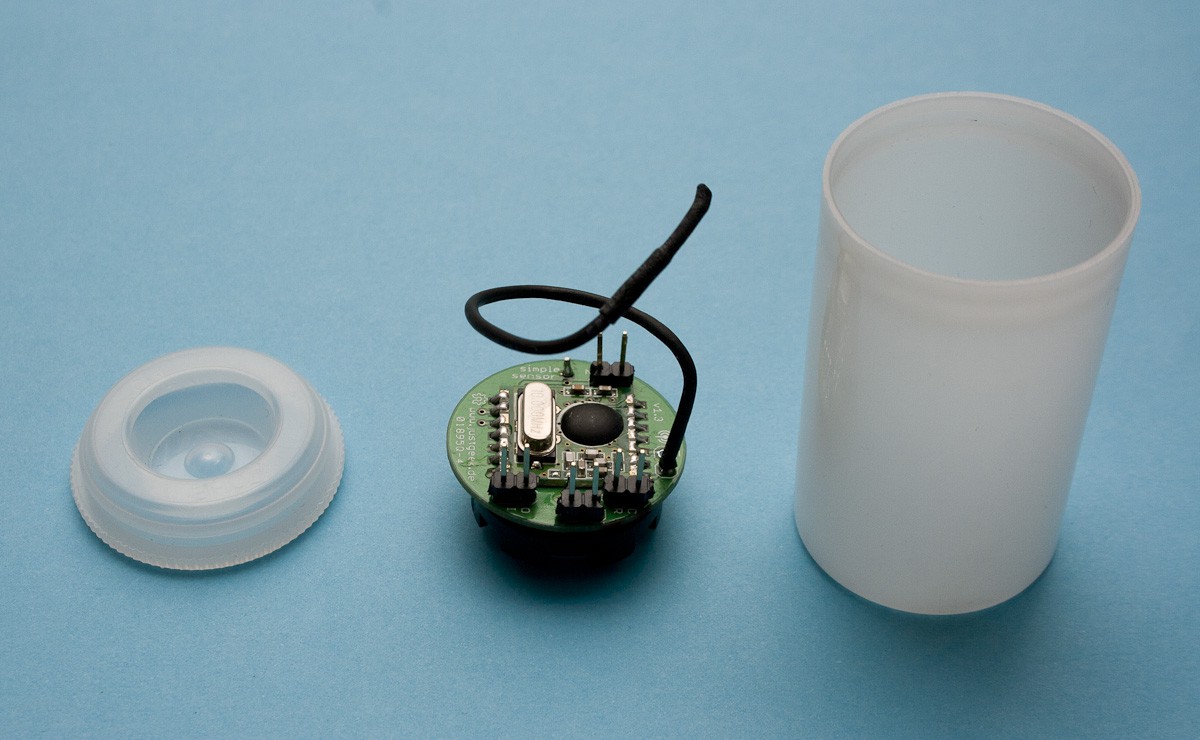
Project 1: A small energy efficient sensor node.
This is small temperature sensor based on an Attiny45 IC and a 10k NTC resistor. It will send out an update every 150 seconds and sleep inbetween. Powered by a CR2032 coin cell, it should last for a about 6-12 months.
![]()
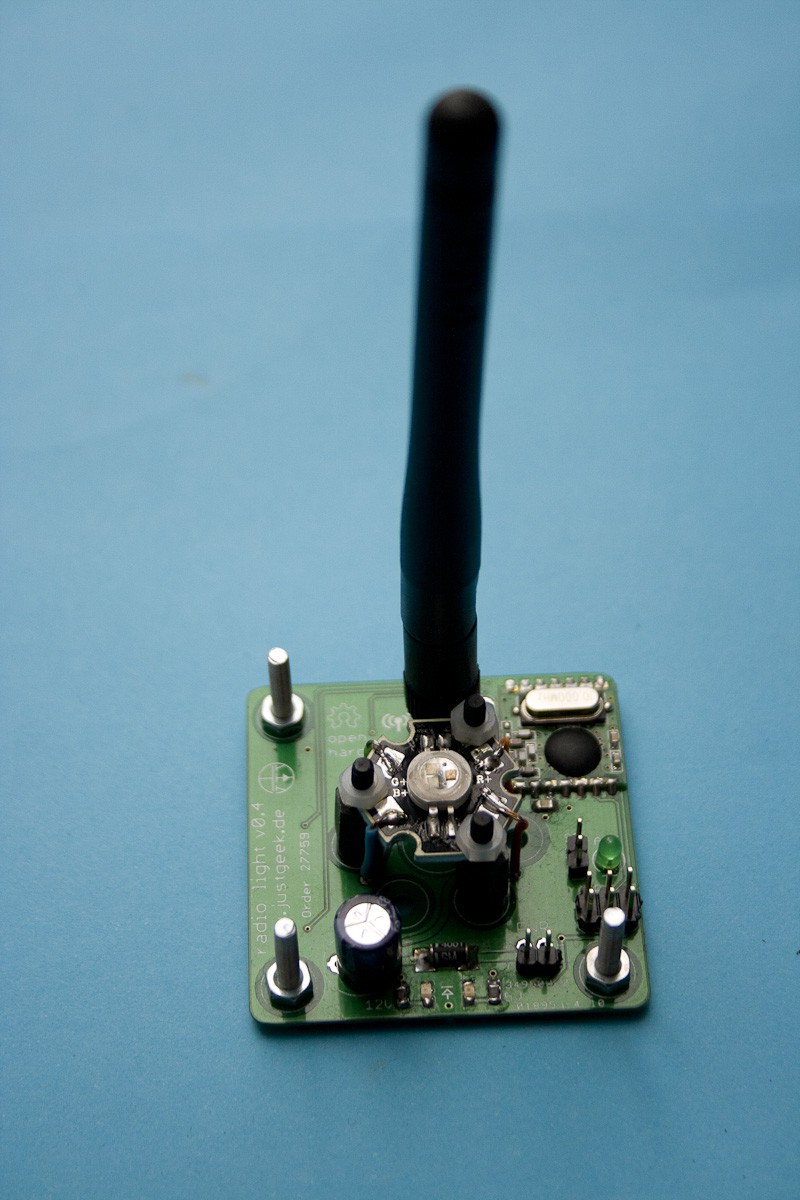
Project 2: A remote controlled RGB light
![]()
This light is based on a cheap 3 Watt RGB LED from dealextreme, controlled by an Attiny44. Via the radio you can select individual colours as well as simple fade and strobe effects.
![]()
-
Easy to control external devices
08/20/2014 at 18:06 • 0 commentsThe current hardware interation has only a few basic interfaces:
- A 434 MHz ASK radio transmitter
- A 868 MHz FSK radio transceiver
- A 2.4 GHz radio transceiver
- An IR LED
- AN IR Receiver
- 2 Optocouplers
- 1 (+2 external) thermristor temperature sensors
- 1 DHT11 humidity sensor
These can be used to control (among others) the following devices:
- Generic multimedia equipment (via the IR)
- Remote outlets (via the 434 radio)
- Other custom sensors / activators (via the different radios)
- Power buttons on computers / etc (via the optocouplers)
And receive information from IR remotes and various (custom) sensors.
While this is far from a complete automation system, it provides a lot of oportunities to test the infrastructure.
-
The basic hardware layout
08/20/2014 at 17:58 • 0 commentsAll prototypes so far have split the workload into two parts.
A small microcontroller for the direct device interaction, and a larger linux server for the interpretation of the received commands and storage of the sensor data. The first prototype was based on a custom Arduino shield, and an offsite server, connected via the Ethernet shield. In this case the Arduino actually interpreted some of the inputs directly.
The second prototype is still based on an Arduino compatible Atmega328, but in this case the offsite linux server has been replaced with a raspberry pi connected directly via the serial interface. This reduces latency issues and encapsulates the whole control station in a fairly compact package.
The reduced latency also means that almost all decision making can be left to the raspberry pi. This is a first step to a completly rule based automation system.
-
The infrastructure inspiration
08/20/2014 at 17:46 • 0 commentsThe general layout is heavily inspired by the Robot Operating System.
However, while ROS is great for a complete complex autonomous systems, it can also be fairly intimidating to setup and use. I want to focus more on the message format, and allow everyone to use their own choice of programming language.
By having a common message interchange format and an example server / rule system, I hope to demonstrate a flexible but easily extensible automation system, which can be run on nearly every hardware platform.
Aaaaarc
Another affordable apartment automation and remote control system. Make automation actually automatic.