 4D Makers
4D MakersThis project is a simple line follower robot. We used the 4Duino-24 as the controller of the robot or rover. The rover will be on track of the line with the IR sensor giving the direction moving forward, left, right, reverse and stop.
Build the components as shown in this Fritzing diagram.
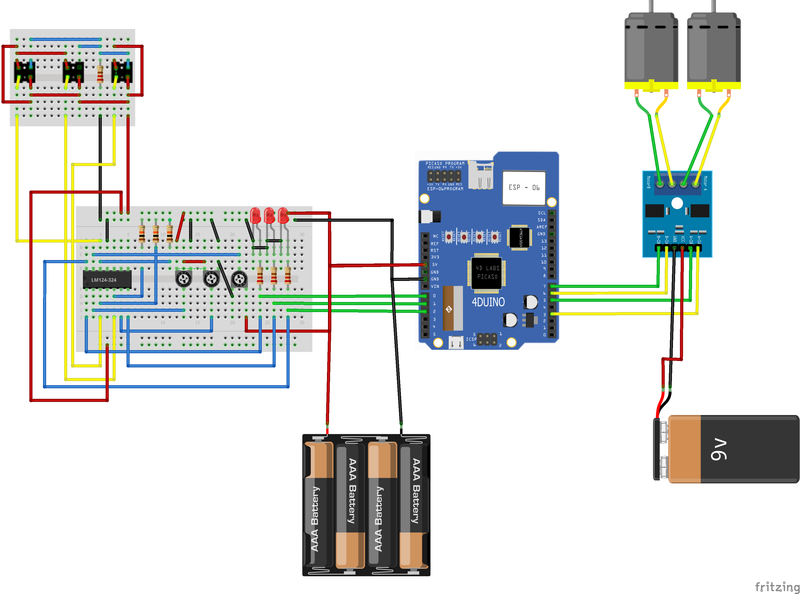
For more info, read more here.
 Inderpreet Singh
Inderpreet Singh

 middelbeek
middelbeek