 icstation
icstationThe multi-Function automatic move smart car uses an MCU development application system and a 4-wheel driver system,the core of which is arduino Atmega-328P.It can realize multifunction,such as tracking,obstacle avoidance,remote control and some other functions.
ICStation team use the kits which contain a mass of interesting code,and extensible external circuit module to make the smart car.It is of great fun to keep away form boring theory knowledge and gain ability of development MCU system during the project making process.
Outline:
—Function Introduction
—Main Parameter
—Component
—Installation Steps
—Method of Application
—Black or white line detection principle
—Code for Reference
Function Introdution:
1>.Ultrasonic obstacle avoidance mode;
2>.Automatic obstacle avoidance mode;
3>.Tracking mode(in black wire);
4>.Automatic move mode;
5>.Remote control mode.
Parameter for your reference:
1>.Gear motor reduction ratio1:48,driver voltage 6V;
2>.Motor driver module is L298N;
3>.Three tracking module,detect black and white wire;
4>.Remote control communication module.consist of remote system;
5>.It can connect to many other sensor ,so it can complete many other function as you have in your mind.
Performance Parameter:
1>>.detect distance:Test white paper is about 2cm.Depending on the color of different distance is different.white is farthest
2>>.supply voltage:2.5V~12V,Not more than 12V(It is best to low voltage power supply, power supply voltage is too high will shorten the life of a sensor.5V power supply is preferred)
3>>.operating current:18-20mA when 5V.By a large number of tests, sensor hardware Settings for 18~20mA best performance when working current, main performance on anti-jamming capability
4>>.An object is detected, the output signal low level; Not detected objects, the output signal of high level.
5>>.Sensor output TTL level, can be directly connected to the 3.3 V or 5 V micro controller IO port.
Components:
1>.Gear motor x4
2>.Wheel x4
3>.Motor fixed part x4
4>.100*213*5mm perspex sheet x1
5>.100*213*5mm perspex sheet x1
6>.L298N motor driver module x1
7>.Arduino uno 328 x1
8>.Arduino sensor shield x1
9>.PTZ x1
10>.Servo x1
11>.Ultrasonic module x1
12>.Three tracking module x1
13>.Infrared receive sensor x1
14>.Remote control unit x1
15>.MINI bread board x1
16>.6xAA battery holder x1
17>.Dupont cable x30
18>.1M USB cable x1
19>.Copper cylinder M3*35mm x3
20>.Copper cylinder M3*20mm x2
21>.Copper cylinder M3*6mm x6
22>.M3 screw and nut several
Step 1: Install Motor

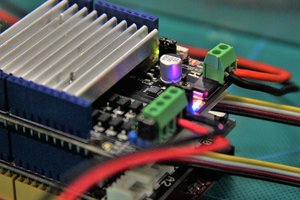
Step 2: Install motor driver module

More details about this module:http://www.icstation.com/product_info.php?products_id=2706
Step 3: Install control board

You need 4x5 Matrix Keyboard Buttons with Water Lights for arduino.
Step 4: Install battery holder

Step 5: Install infrared receive module

The infrared receive module you need:http://www.icstation.com/product_info.php?products_id=1612
Step 6: Install tracking module

The tracking module you should prepare:http://www.icstation.com/product_info.php?products_id=2720
Step 7: Install gear

Step 8: Fix Ultrasonic

More details anout Ultrasonic Module HC-SR04 for arduino:http://www.icstation.com/product_info.php?products_id=1389
Step 9: Fix PTZ Kits on Chassis

After finishing this step,the installation complete!
Step 10: Method of Application
1>>.There are 3 row needle sensor interfaces, is GND, VCC, OUT. VCC &gnd for power supply side, the OUT signal is output.2>>.An object is detected, the output signal low level; Not detected objects, the output signal of high level.
3>>.Major judgment signal output is 0 or 1, will be able to determine whether an object exists.
Step 11: Black or white line detection principle
1>>.Using black to light the reflectivity of the characteristics, when the surface color is not black, infrared sensors to launch out by most reflected. The sensor output low level 0.2>>.When there is a black line plane, sensors in the black, because black reflection ability is very weak, very few reflected... Read more »

 Maker-fabs-J
Maker-fabs-J
 Tony-Lin
Tony-Lin
 Grégory Paul
Grégory Paul