 Peter Walsh
Peter Walsh[A Hackaday article submitted for the "we're hiring" article.]
[Third attempt. I can't seem to find a good enough article to write about for Hackaday, so maybe I'll just compose one of my own. A "good enough" article needs a video, is interesting, and not already have a HAD article covering it.]
[Oh, wait! Here's one...]

December 4, 2016 by Peter Walsh
One of the best things about the Hackaday prize is that it presents all manner of great projects to the world to build, modify, and learn from. One of these is the Thor 3-d printed robotic arm.
Thor is not your typical hobbyist or robotics club build, it's pretty much a scaled-down industrial robotic arm in a desktop configuration. The yaw-roll-roll-yaw-roll-yaw configuration is the same as found in many industrial robots on the market.
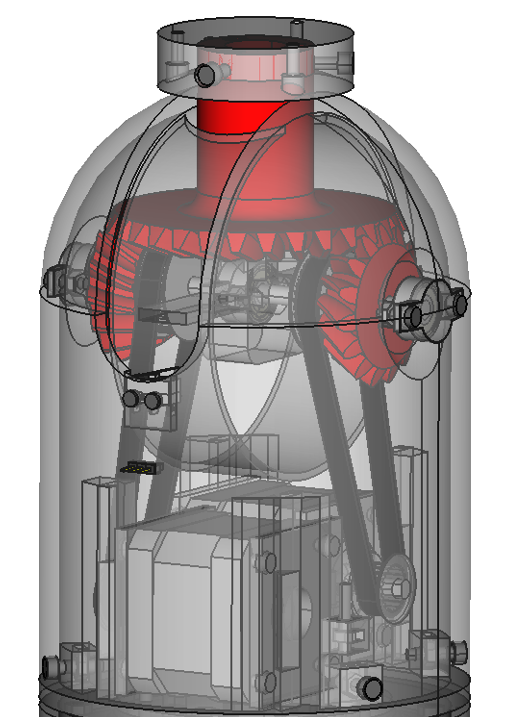 The arm has six degrees of freedom using seven stepper motors, some of which are gear-reduced for greater torque. The design hides the internal mechanism: all the pulleys, belts and wiring are enclosed, making the whole project kid safe.
The arm has six degrees of freedom using seven stepper motors, some of which are gear-reduced for greater torque. The design hides the internal mechanism: all the pulleys, belts and wiring are enclosed, making the whole project kid safe.
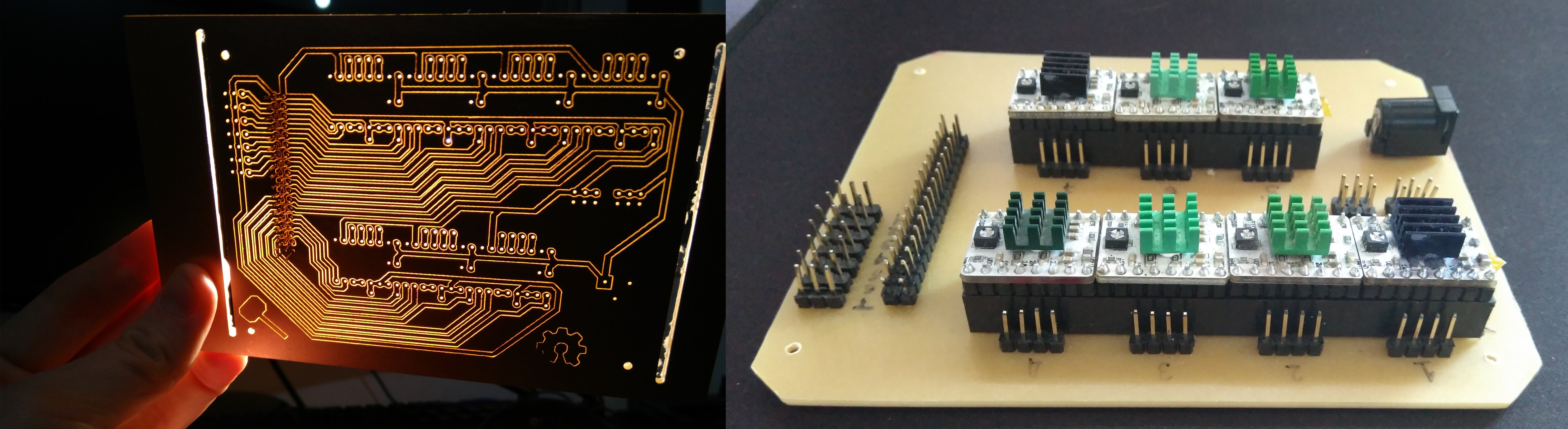
Steppers are controlled by an Arduino Mega using a specially-designed 7-motor driver shield and pololu motor drivers. The system could probably also be driven by a couple of RAMPS boards, and the project logs talk about using a smoothie board to control 5 of the seven motors.
{kind=link}
Thor is 3-d printed plus hardware, and the entire kit looks like it would be perfect for learning about industrial robotics, solving a Rubik's cube, or perhaps stirring your tea.
We've seen robotic arm projects on Hackaday before, including one made from cardboard.
Check out the video of Thor in action after the break.
Posted in Arduino Hacks, robots hacks
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.