Arkadi
Arkadi-
Angry Elephant Game
09/20/2015 at 09:02 • 0 commentsAs part of the Geekcon2015, (I and a friend) have created the Angry Elephant game, which is based on two Stage lamps dressed as an elephant with a hat. and the point of the game is to make one elephant drop the other`s hat off. Controlling the elephants is done throught the smart juggling balls. Dahh :)
![]()
-
EduBall Demonstration
07/01/2015 at 10:42 • 0 commentsI have done some tests with the platform and have plot results to show for (recorded in real time at 100 Hz).
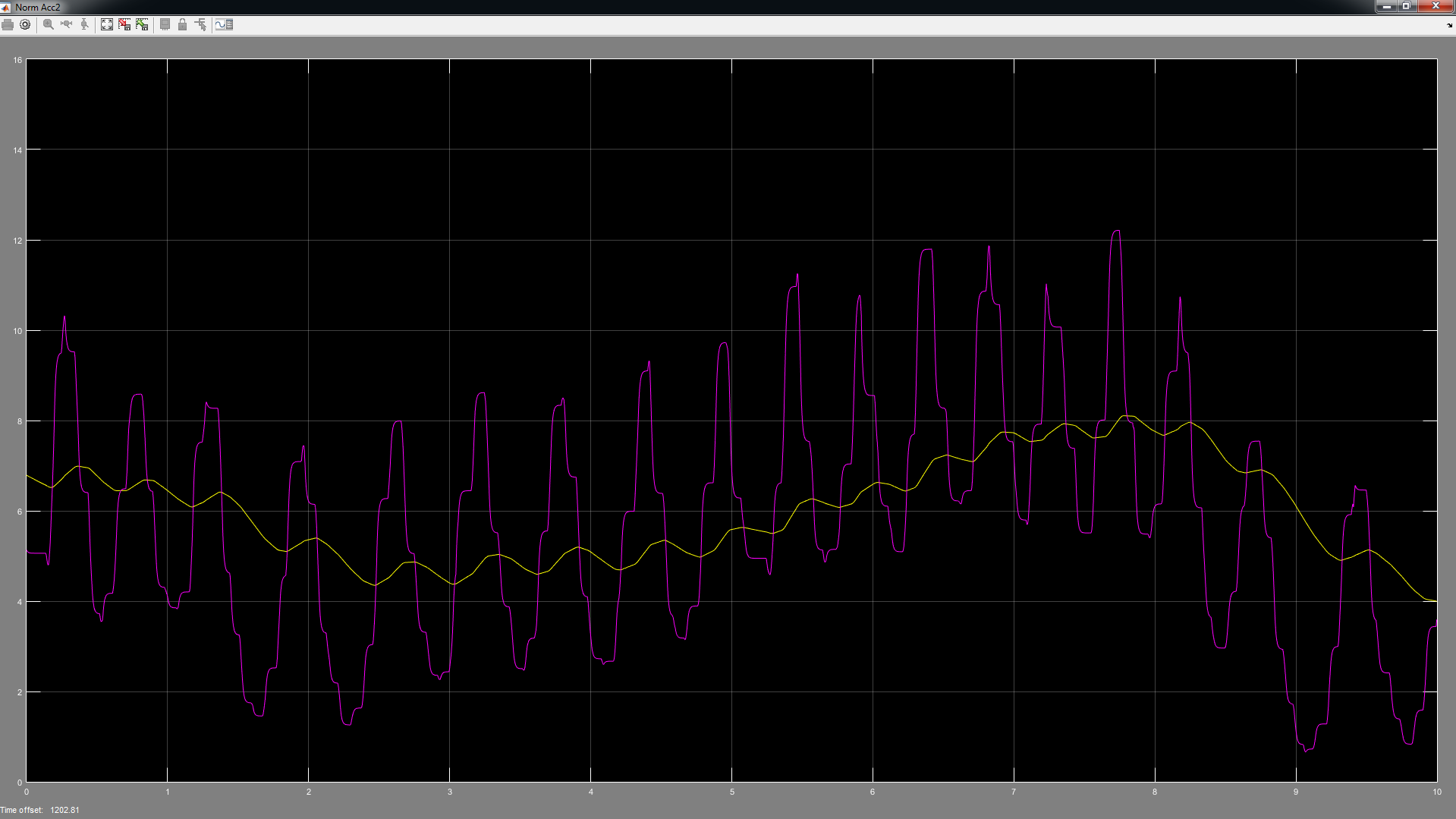
First image demonstrates filter effects on the measured acceleration, for the test i have put the ball in a plastic bag and rotated it in the vertical plane resulting in the effect seen in the graph. As you can guess the purple line represents raw data and the yellow one, is the filtered data with a simple LPF filter at time constant of 1 second. (the graph scale is in g`s)
![]()
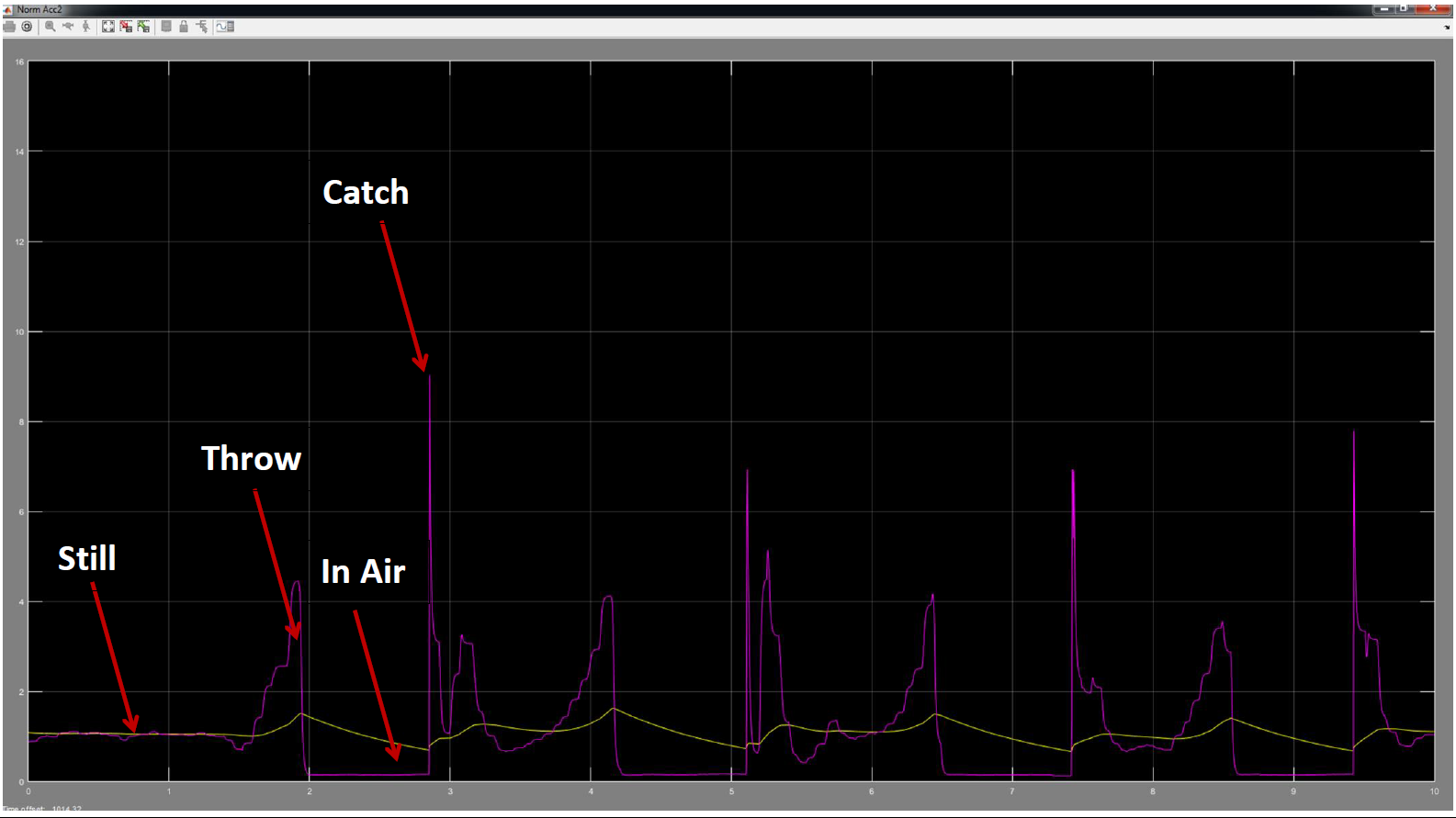
After that i have decided to play some throw and catch. (the graph scale is in g`s).
![]()
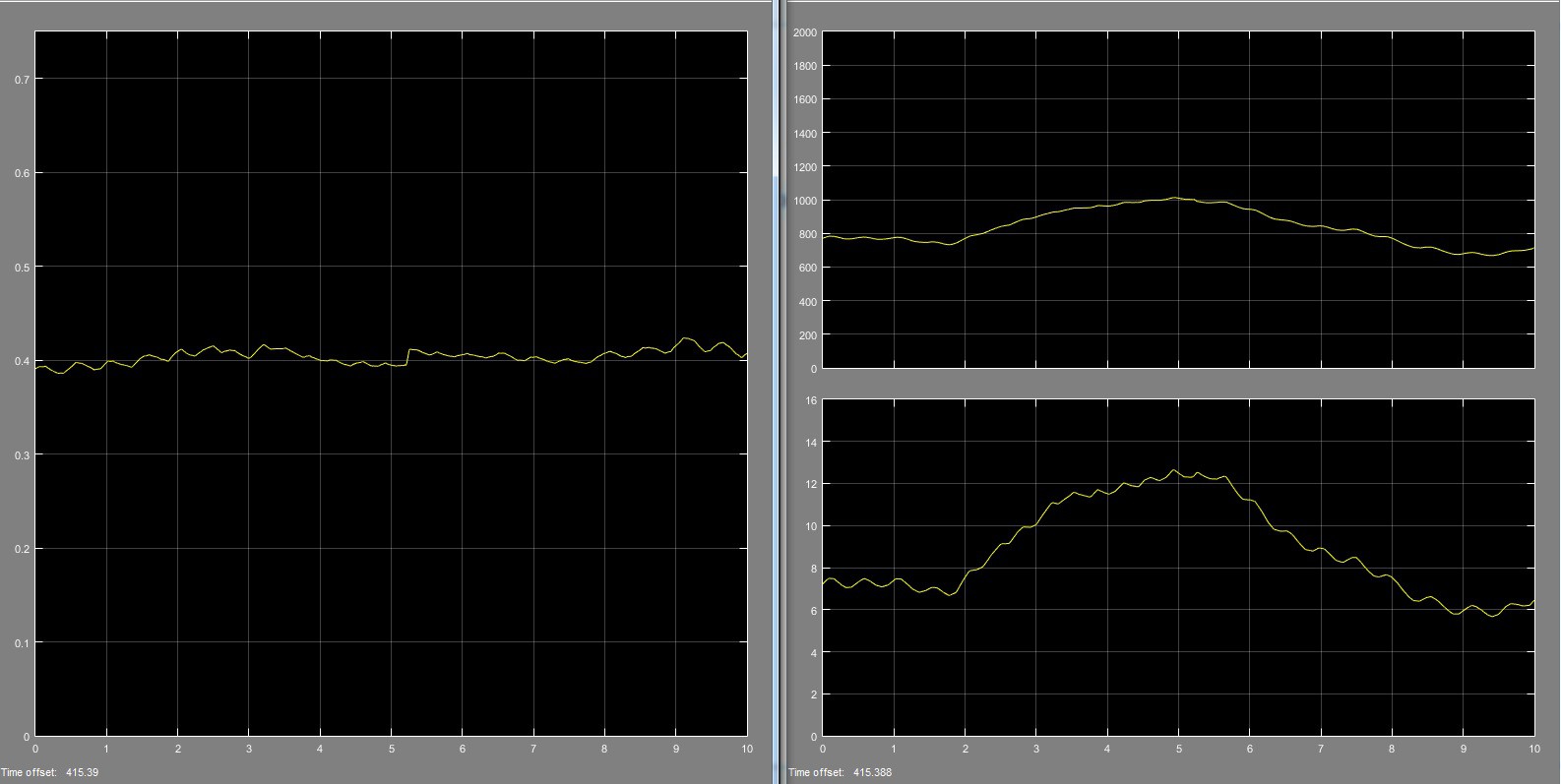
And for the finish i have decided to test how precisely i can calculate the length of my plastic bag based on the readings of the gyro and the accelerometer. (Centrifugal force)
![]() (image is taken from this site.)
(image is taken from this site.)And my results: (the graph units is deg/sec for the gyro, accelerometer at g`s. and length in meters).
![]()
Surprisingly (and maybe not) the length turned out to be pretty accurate and as you can see i have played with the rotation velocity).
So go grab your plastic bag, and do some experiments. (be careful, i managed to bump the ball into my head while trying to press the print screen).
-
EduBall Simulink Model
06/29/2015 at 10:16 • 0 commentsA few updates,
I have recently added a Matlab Simulink model to the GitHub including additional code, the model is also available on Matlab file exchange: Simulink Model.
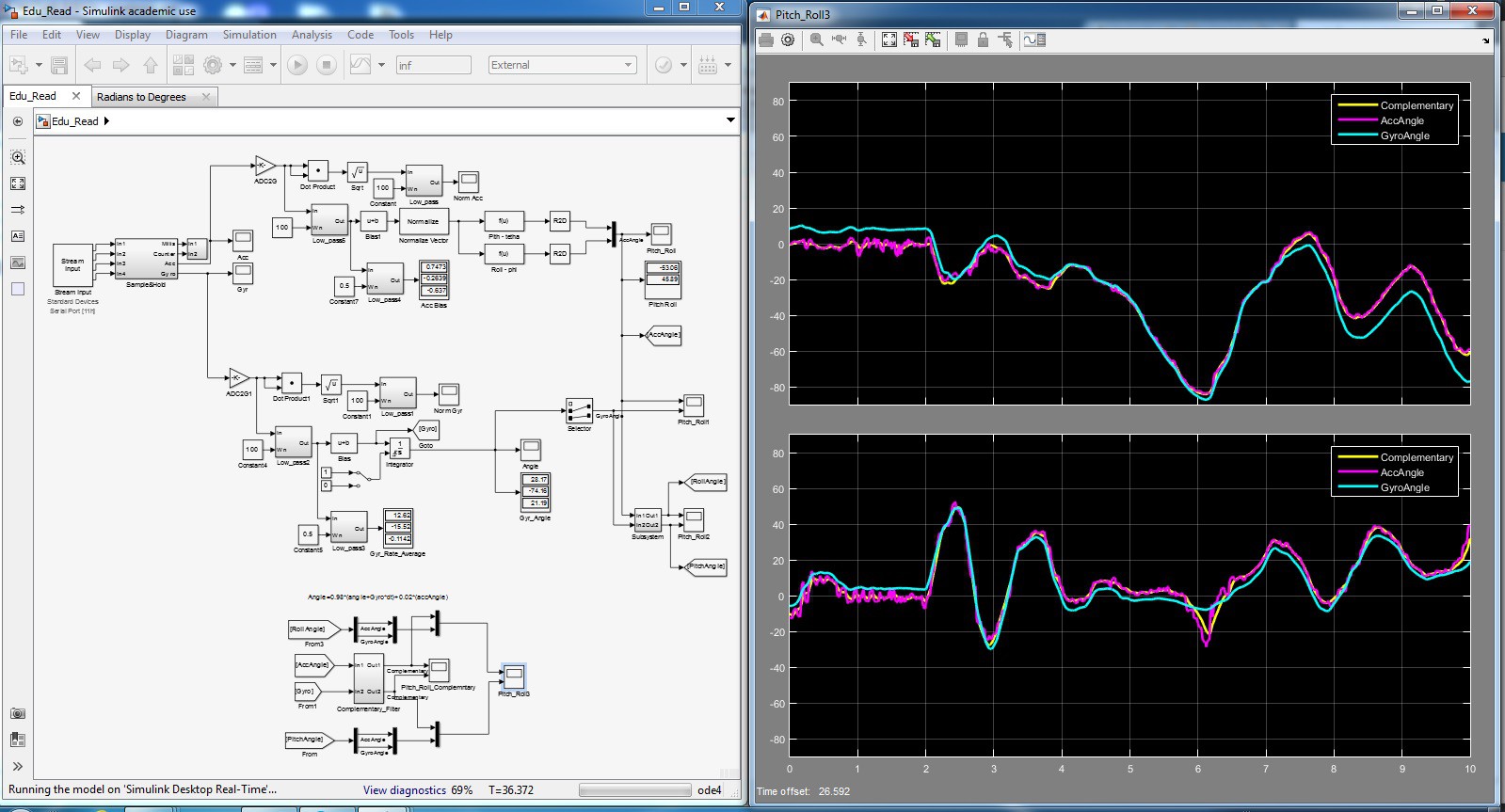
The model is designed to check the feasibility of the project, in terms of what Physical phenomena i can actually demonstrate with the current hardware setup. The setup is quite simple, The juggling ball is used to measure the Acc/Gyro values and transmit it to a "dongle" (NRF_Receive) which is connected to the computer via USB. The Simulink model reads the values through a COM Port and performs some simple data manipulations. The update rate of the data is set to 100 Hz.
The simulink model is used to demonstrate Acc/Gyro Raw values, Acc/Gyro Scaled and biased values. Normal Acceleration and Rotation Rate. angle calculation based on Gyro integration and Acc gravity vector calculation. and the final is complementary filter demonstration with comparison between the different approaches.
See image as to how it all looks:
![]()
Conclusions:
From the Acceleration reading it is very clear to distinguish Free fall and average g such as 1g when the ball is still. It is possible to see the high g`s when the ball is hit, but not at enough sample rate to perform any calculations based on the data such as energy conservation when the ball is thrown and caught at the same height)
The centrifugal forces are also very clear to demonstrate and to actually compare them to the gyro rotation rate, (as long as the gyro isn`t saturated (at 2000 deg/sec).
finally it seems that the hardware is good enough for most demonstrations, (still there is a lot of work ahead to actually build a class curriculum and run a pilot).
The current stage of the project:
- Find a big company which is interested in supporting the project
- Test better hardware setup, to get higher sample rate (1 KHz), and with wider range of the accelerometer (200g).
- Find someone interested in education to help with the curriculum
-
Stage LED Lamp
06/29/2015 at 08:43 • 0 commentsSomething fun to do with the Smart Juggling Balls: Control a Stage LED Lamp, and make it change colors :)
Enjoy,
-
ShakeIt
05/30/2015 at 11:10 • 0 commentsUsing the smart juggling balls i have created an interactive art exhibition, more details are available at: https://hackaday.io/project/6039-shakeit
In addition attaching a video for my other version of juggling balls, consisting of 52 LED`s each:

 (image is taken from this
(image is taken from this