 Voja Antonic
Voja AntonicThere are a lot projects which seem similar, but this one creates 2D sound image, which can provide X,Y position and approximate dimensions of each obstacle, in two horizontal planes.
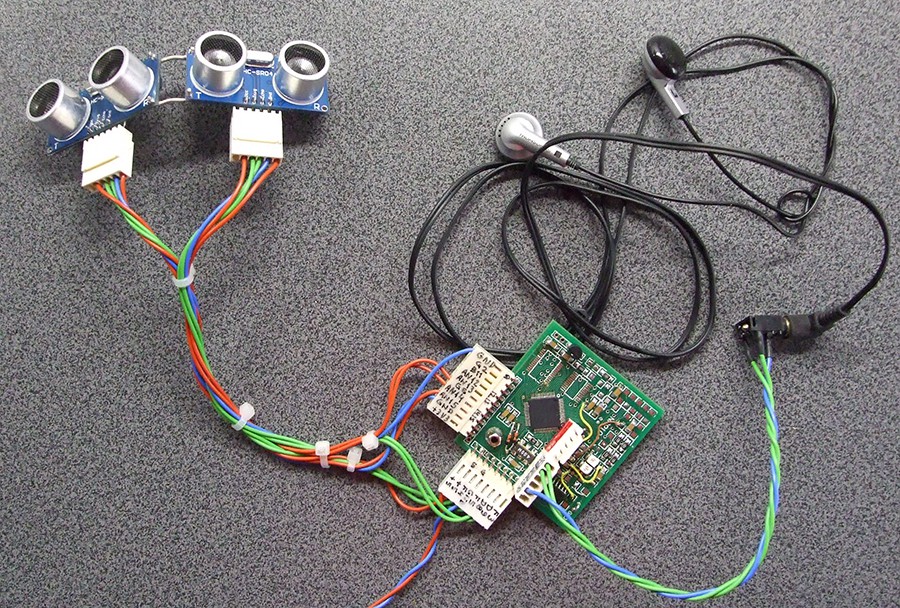
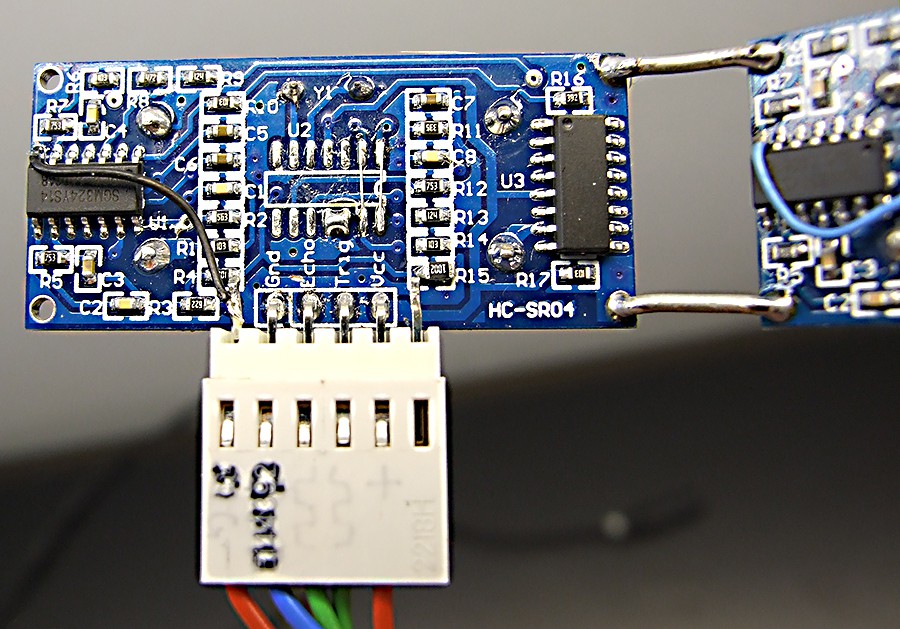
There are four pairs of standard ultrasonic range finder speaker/microphone pairs, and they emit short pings, about 1 ms each. Stereo signal is amplified and sampled by MCU in 45 ms period, which covers about 7.6 m diameter. Then the sampled sequence is played at about 20x slower rate, which will last about 900 ms. That gives the 1Hz repeat rate.
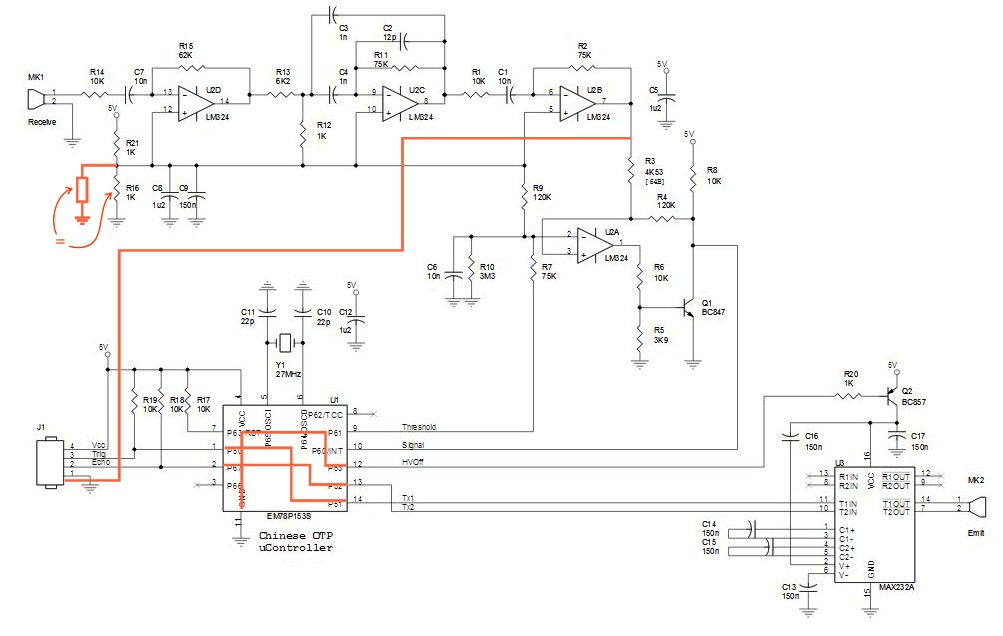
If the ultrasonic frequency is 40 KHz, the reproduced tone will be lowered to 40/20=2 KHz, which is unpleasant for permanent listening. Luckily, the reproduced frequency is unique, so it is easy to lower the frequency without affecting timings, by emitting sampled slices in lower sample rate.
User will hear reflected pings at timings which depend on distance (Y position) to the obstacles, and binaural effect of the stereo sound will determine the X position of each obstacle. At the same time the sound volume will roughly depend on the obstacle's dimensions.
There are two equal stereo sets, one of which covers the horizontal plane, and the other one is pointed about 30° downwards, to detect lower objects (stairs, pavement, holes). Those two sequences can be played simultaneously, with different tone frequencies.
I will surely make the prototype and put the results here. The main problem for me will be how to purchase the wide angle ultrasonic speaker/microphone pairs, as most of them are typically quite narrow. The optimal characteristics would be Lembertian, but I wonder is there such ultrasonic transducer on the market.
I shall also add 2- or 3-axis magnetometer, so the MCU will play one more short tone signal (with some other frequency) after every (or every Nth) ping-play sequence. Its stereo position will denote North (or South, with two short tone signals). I think that it might also help a blind person in orientation.
... some very early background of this project ...
About 40 years ago, I was the young licensed ham radio operator, and one of our radio club members was blind. He had the problem of adjusting his transmitter to the peak output, as he couldn't see the instrument dial. We made some very rudimentary voltage controlled oscillator for him, which was squealing and whirring more than producing normal oscillator tone. But he was delighted, as he could also hear some more transmitter parameters in that awful sound. We did our best, but no one of us (except him) could ever hear anything meaningful in that noise.
That makes me think that it is more helpful to give the visually impaired person the raw audio information, than to clean and shape it, like the sonar range finders do.






 Dan Berard
Dan Berard
 tshen2
tshen2
 Joseph Eoff
Joseph Eoff
Hey Voja, If hearing the same tone for a long time is annoying, do it in the opposite direction: Use white noise and subtract the tone signal result, or directly modulate a filter response in amplitude or phase.