deʃhipu
deʃhipu-
Spider Mode
07/01/2015 at 10:05 • 0 commentsYesterday I finally decided to kill one of my failed projects, the Pico-Kubik (pKubik for short). It was the third robot in the series, following #µKubik quadruped robot. It was supposed to be smaller and cheaper by the virtue of only using 8 servos, 2 per each leg, and doing inverse kinematics through solving a complicated set of non-linear equations, for all legs at once. The idea was that while I can't position accurately each leg in 3D with only 2 degrees of freedom per leg, I can do it if I use all the legs together, and ignore the position of the body itself. While I still think it may be doable, the complexity of required math defeated me, and the robot was standing there on the shelf, waiting for its turn.
So yesterday I decided to disassemble it, and reassemble into a younger sister of #Katka, a mammalian robot. I've been complaining that Katka's leg construction is sub-optimal and needs rebuilding, but since that requires physical changes, and I don't have a version control system for the physical world, I was reluctant to break an otherwise perfectly fine robot. So now, with 8 spare servos to use, I could just build another Katka from scratch, but with a different leg configuration.
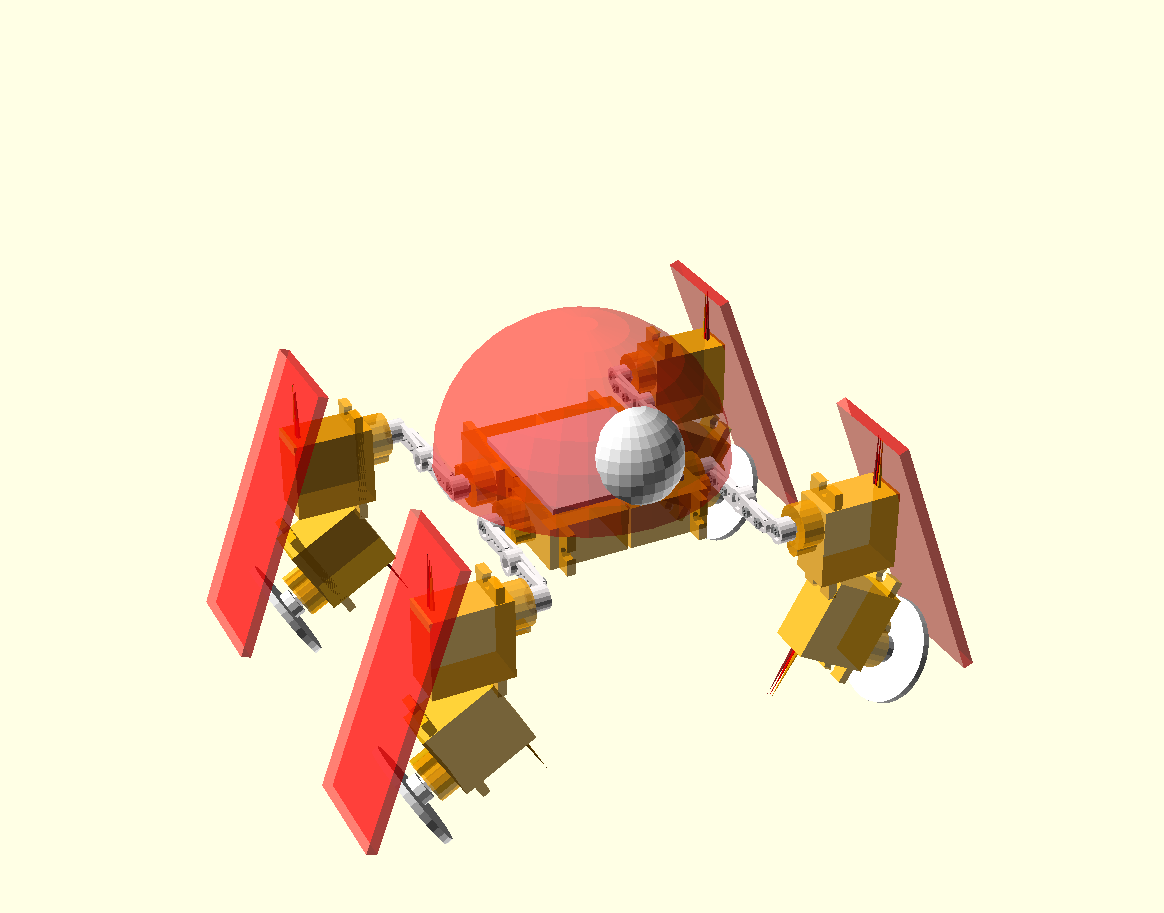
I also have this idea at the back of my mind, of building a working Logicoma model, that would look something like this:
![]()
As you can see, this is basically Katka, but with the legs a little more spread out, and with additional continuous-rotation servos for the wheels. The angled wheels would let it turn by moving the legs forward and backward. So, I needed to confirm that this configuration will indeed walk well, and maybe later add the wheels.
Anyways, here's the robot walking:
One problem I had is that since the center of mass is much lower in this one, I needed to tilt the body sideways much further then in Katka to make sure the center of gravity moves far away from the leg being raised. I suppose that with the greater leg range that this configuration gives, I could also move the body forward and backward a little, to improve that. But generally I'm very happy with how it works.
-
Reworked Electronics
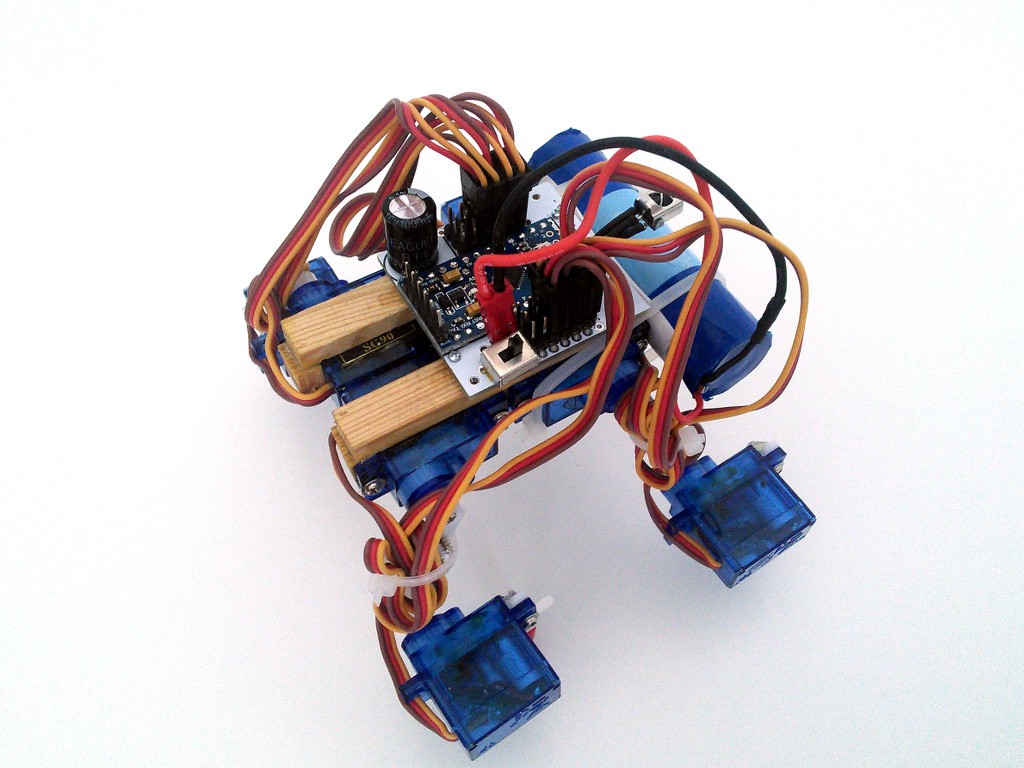
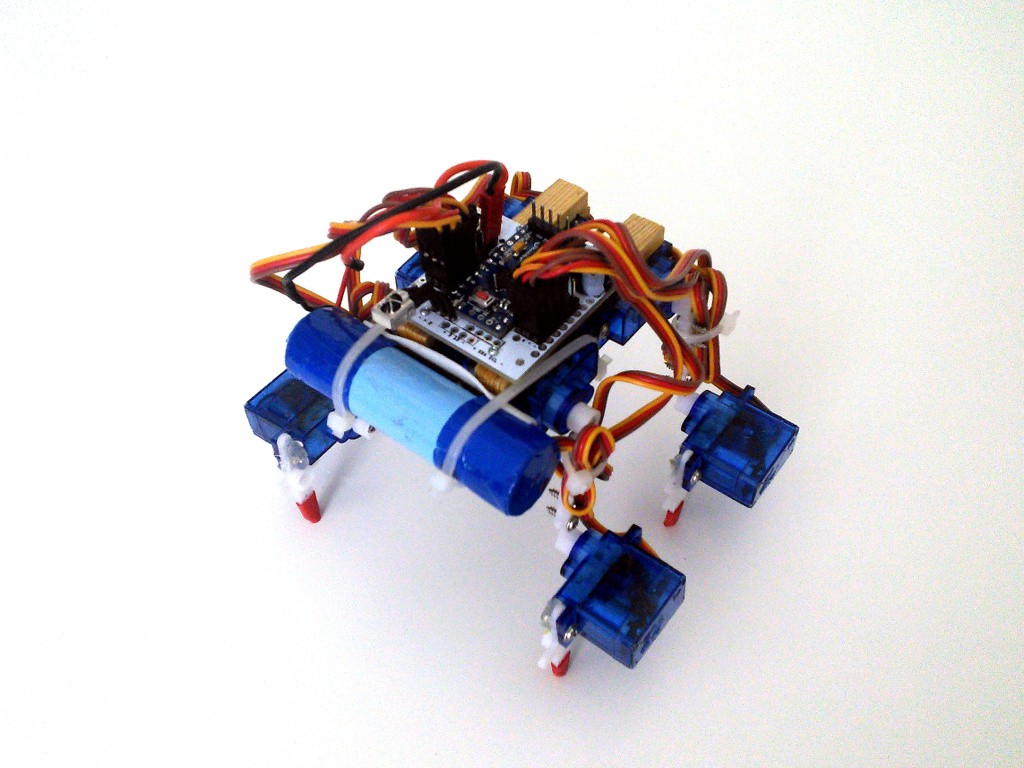
06/26/2015 at 10:23 • 0 commentsSince I have a couple of new boards for #Tote, affordable spider robot, I decided to re-make the electronics for Katka. I got rid of the boost converter and the huge capacitor, using a 3.3V Pro Mini instead of the 5V. I also soldered all the parts on one side of the board, so that it can be attached easily with screws at the top of the robot. The battery is still just strapped to the front -- it has to be there for the center of gravity to be in the right place, unless I bite the bullet and rework the legs too.
![]()
I also fixed a very silly bug in the code, which made it ignore all TV remote commands. I still have a quite bad bug in the rotation code somewhere, so turning is not very nice.
![]()
-
Walking Details
06/24/2015 at 12:29 • 0 commentsI've been asked to provide another video of this robot walking, with a better angle, so that the exact movements can be more easily seen. So here it is.
Katka, a mammalian robot
A small walking robot with a mammal-like configuration of legs.