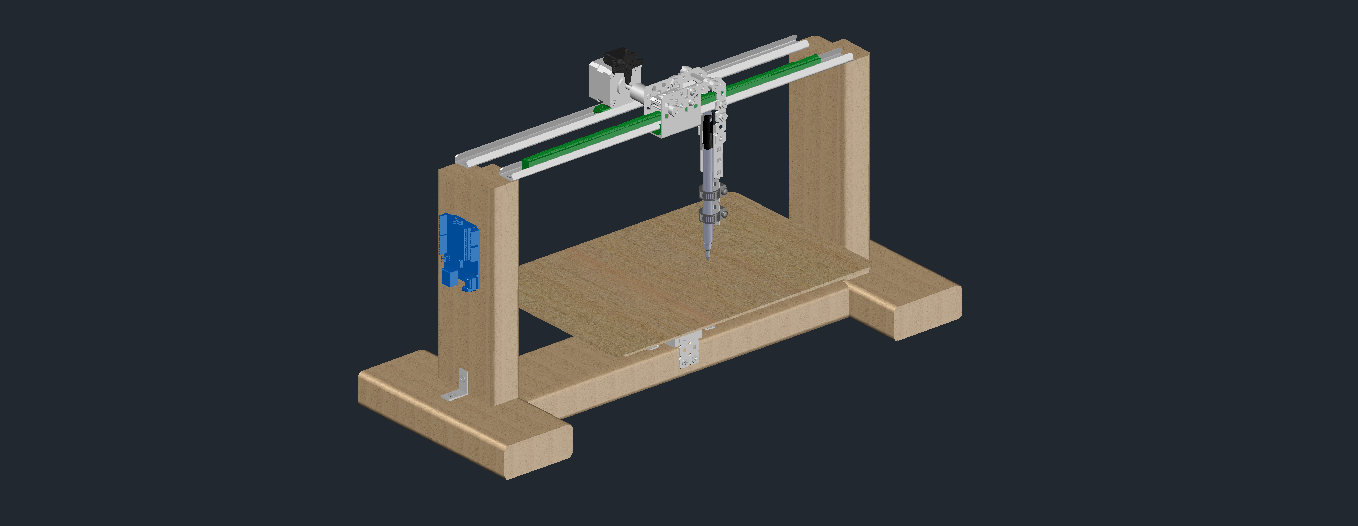
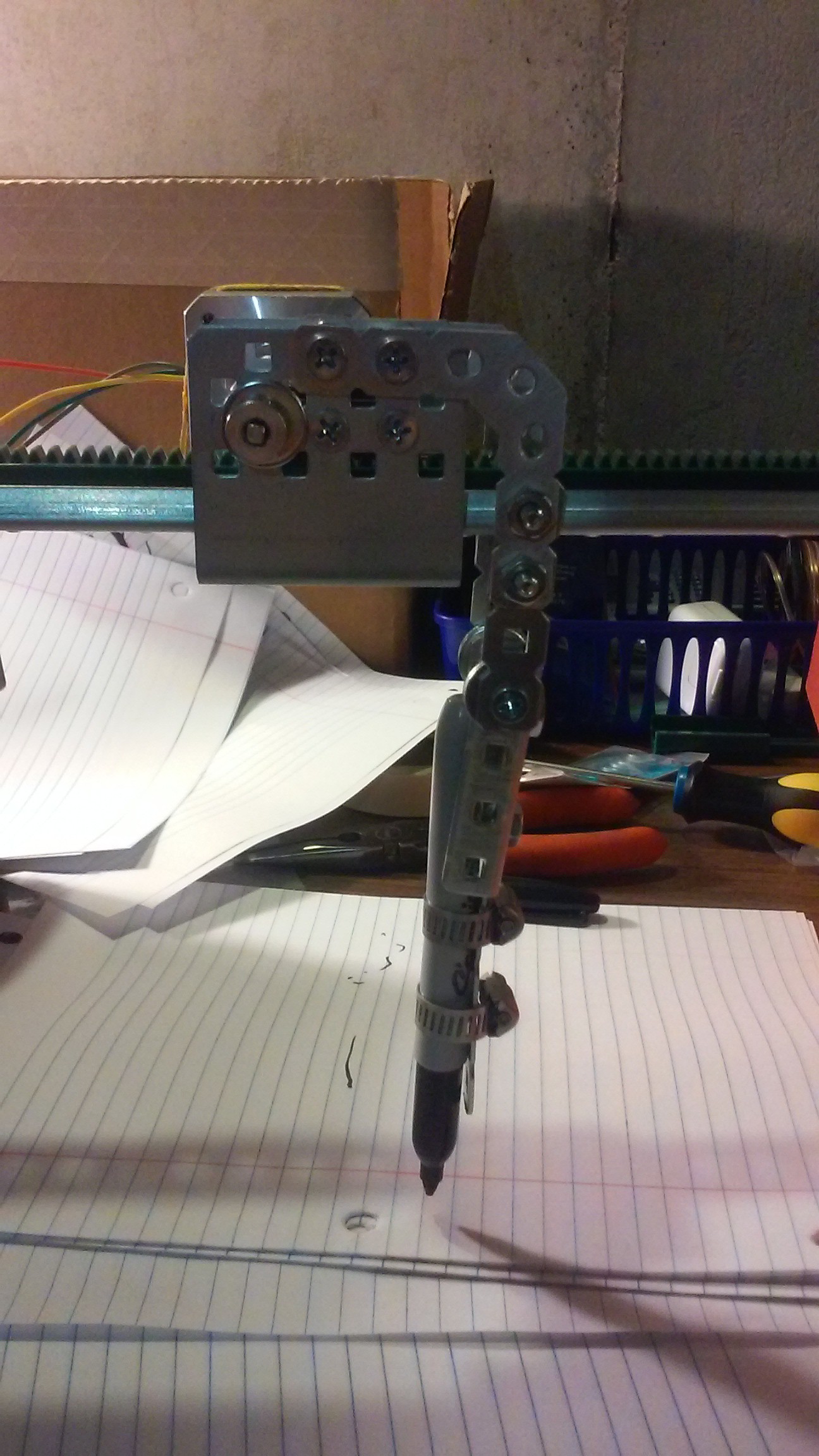
The SpiroBot uses either two NEMA-17 stepper motors or one stepper motor and one continuous rotation servo for flexible and precise control of drawing movements. An additional servo allows for lifting and setting down the pen if needed for drawing more complex figures. All motors are connected through the Adafruit v2 Motor Shield attached to an Arduino UNO microcontroller. Parts from VEX Robotics are used for structure and gearing. The entire assembly is also supported by a wooden frame. The SpiroBot fits nicely on a desk and occupies as much space as a standard printer.
Click to view the System Design Document.
Click to view SpiroBot Schematics (PDF file).
Click to view 3D Model (AutoCAD .dwg file).

 Vipin M
Vipin M
 Chris
Chris
 A.M. Smith
A.M. Smith
To make this device on a smaller scale you could rework a machine called "Polar Coaster Printer" its up on thingaverse.
Polar Coaster Drawing Machine
bartdringOctober 24, 2017