Hexabitz
HexabitzWhat is it?
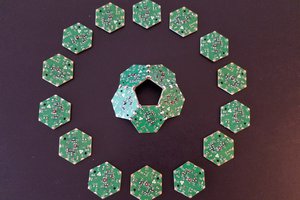
An array of blinky LEDs to get you accustomed to Hexabitz hardware and software workflow. Feel free to send us any suggestions to improve or alternative methods you tried and worked out well
Components
- 5 x H01R00 Hexabitz RGB LED module
- 1 x H03R00 Hexabitz 3.3V / 1A DC-DC buck power module
- 5 x TL59FF160Q Momentary tactile push button
Estimated hardware build time: 10-15 minutes
Estimated software development time: 10-15 minutes for each example
Have suggestions about how to improve our demo projects? Feel free to comment below or send us a private message!
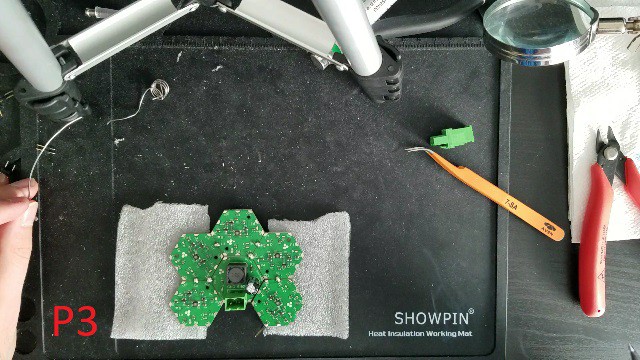
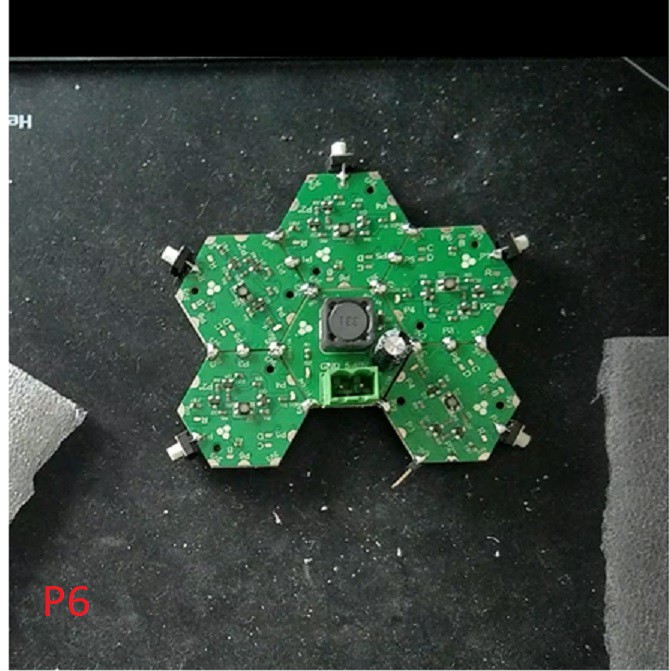
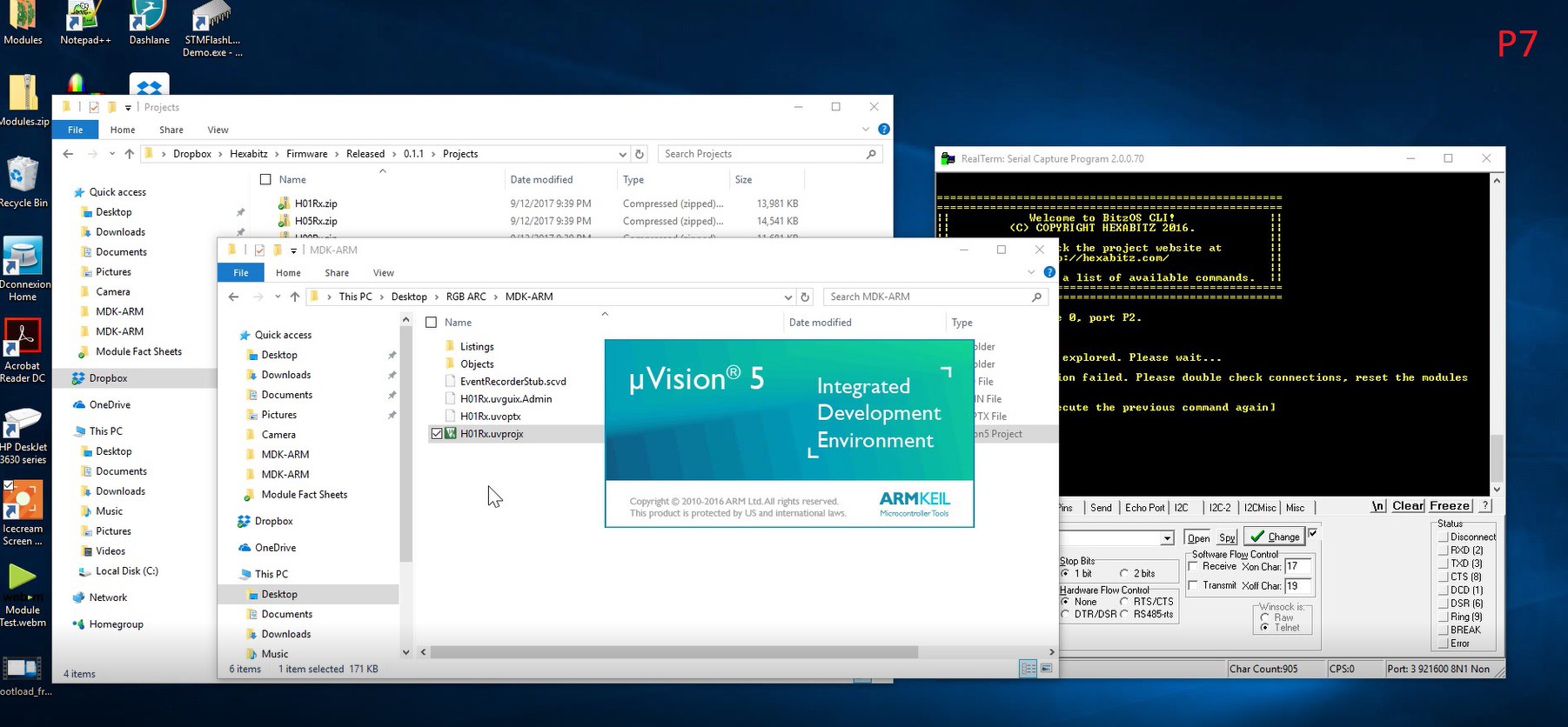
Hardware Assembly and Testing
Please check project instructions for a detailed assembly and programming guide. Reference the pictures by their labels mentioned in text (P1, P2, etc). Happy making!