0%
0%
OTRESC - BLDC Controller
A BLDC motor controller with position and speed control, intended for use in medium sized robots.
 Alberto
AlbertoBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests


 Kevin LO
Kevin LO
 Jason
Jason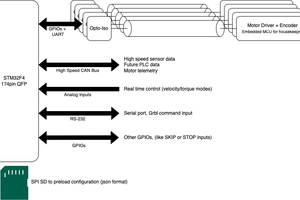
 plugg.ee Labs
plugg.ee Labs
 Scott Duckworth
Scott Duckworth
What does LLM stand for?