 deʃhipu
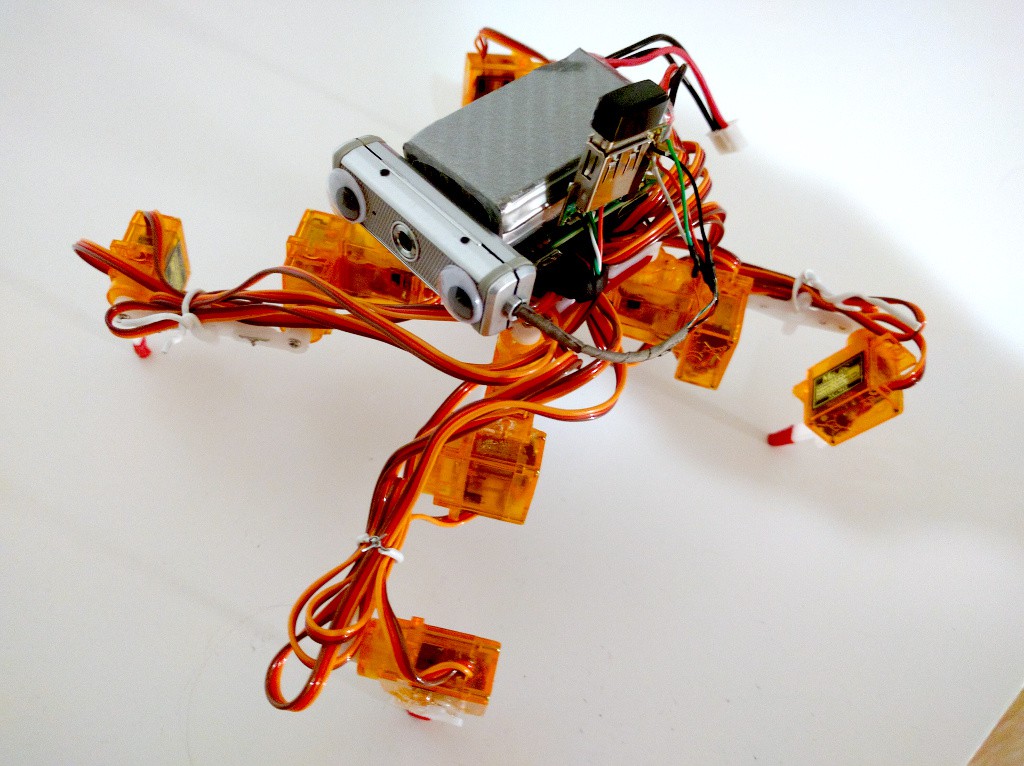
deʃhipuI also needed to figure out a way to attach the camera to the robot in a robust way. So I drilled some holes in the plastic that holds it, and screwed that to the Pi Zero:
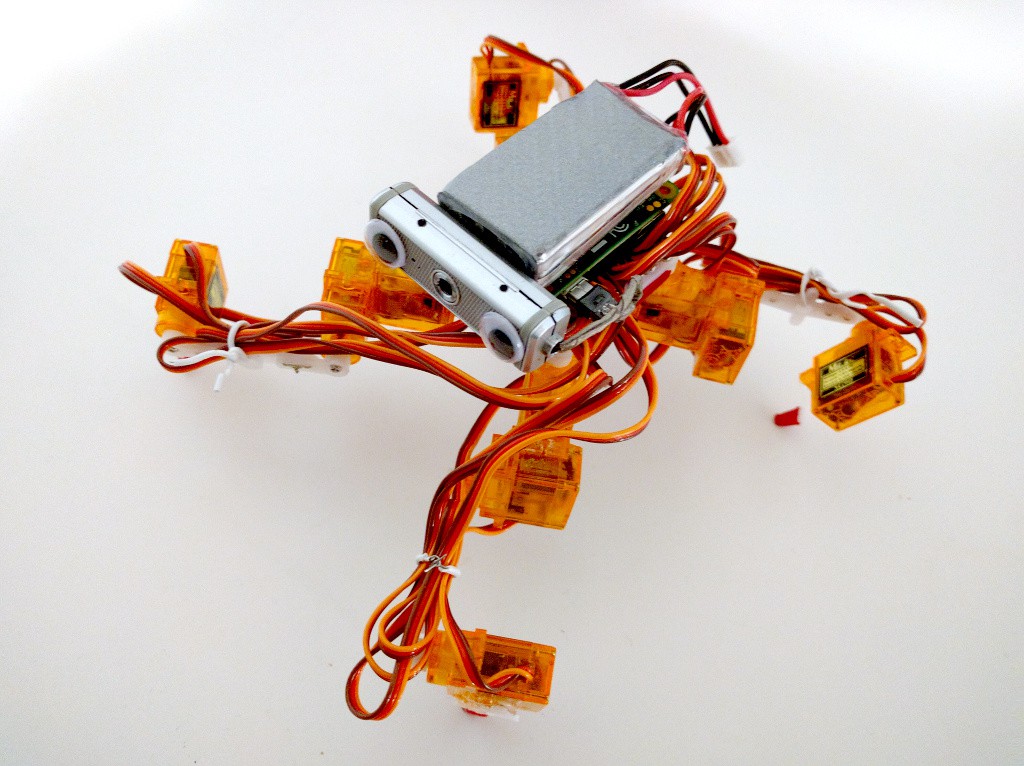
This is with just the camera connected to the USB. But for development it's nice to have both the camera and WiFi, so I repurposed that two-port hub I had, and made an alternate cable:
Of course googly eyes are very important too!
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.