 Alan Green
Alan GreenSoftware
The Arduino Due is programmed with Atmel Studio 7. Source code is at https://github.com/alanvgreen/DirSpk1
Producing highly directional sound from 40kHz ultrasonic transducers
Already have an account? Log in.
To make the experience fit your profile, pick a username and tell us what interests you.
The Arduino Due is programmed with Atmel Studio 7. Source code is at https://github.com/alanvgreen/DirSpk1
This project is dead because I'm not sure that it's safe.
If you recall - I don't blame you if you don't - this speaker works by pumping out a 40kHz square wave, then varying the duty cycle. The human ear would respond to the varying duty cycle. This means that the ultrasonic transducers are continuously emitting full power.
Unfortunately, there have been very few studies on how loud ultrasonic sounds affect people. I'm just not sure about connecting up a 400W power supply and pumping out a continuous, full power 40kHz sound. Because of the directivity of the wave, the volume might even exceed 140dB.
I don't even know how to measure the output.
Finally, we now have a cat. Cats' hearing ranges up to 64kHz, and I woudn't want to frighten or deafen her.
Thanks to everyone who gave me ideas and encouragement while this project was alive!
I chose to use the Arduino Due at a very early stage of this project. Partly I fell into it from curiosity after previously using an Arduino Uno, but there were a few concrete reasons too:
 Five Dues. Two dead. One in use. Two more ready to go.
Five Dues. Two dead. One in use. Two more ready to go.
Maybe the Due wasn't the best choice for this project, but it's working out pretty well none-the-less.
I finished step 1 from my plan.
It works! The speaker shows a directional effect, and it's quite loud, at least in my work area, with the supply cranked up to 30V.
Read more »I'm constantly torn by how "finished" a product I ought to be aiming for. It's very tempting to over polish, but I'm not looking to produce a mass-market device. Instead I should focus on the requirements, then plan how to get there.
For March, I want to build a device that
Things I don't need to do
Here's the outline of how I want to get from where I am to V1
I made a little amp to help debug the audio input / processing side, based on the application notes section of the LM386 datasheet. It consists of an LM386, a 9v battery, an old 8Ω speaker and a handful of capacitors and resistors. I added a 50kΩ pot for gain control.
And here it is built on a mini breadboard:
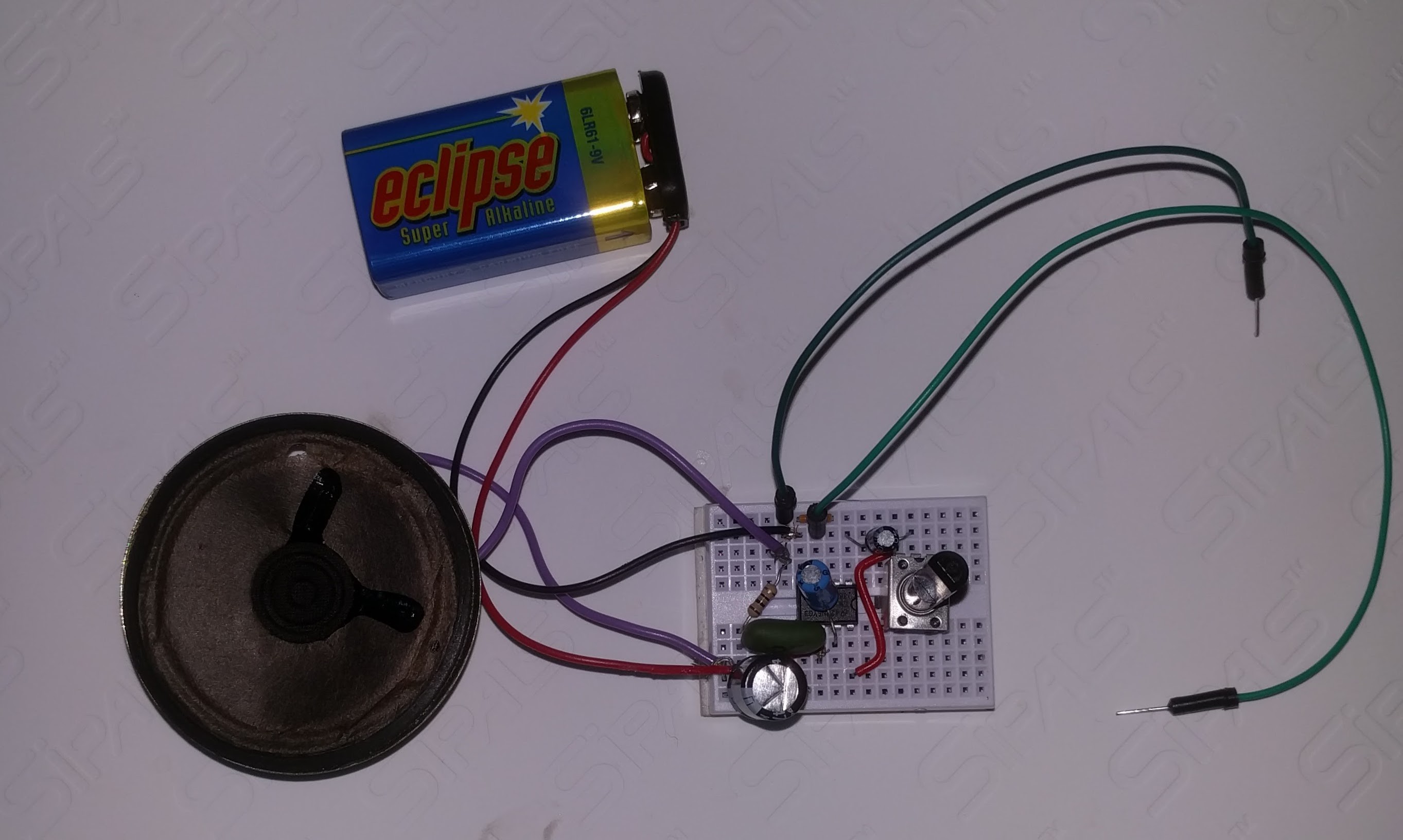
It plays Nouvelle Vague just fine.
This log is a summary of what I've found about directional speakers.
The modern directional speaker began with Joe Pompei at the MIT Media Lab. Large parts of his 2002 PhD thesis go straight over my head, however there is a lot of good information in there, including a summary of previous research into directional speakers (spoiler: the military did a lot of work with sonar), and a human-readable summary of the math.
Pompei combines two ideas to produce a directional speaker.
First, sound waves are directional if the width of the wavefront is much larger than the wavelength. Middle-C (262-ish Hz) has a wavelength of 1.32m, so if a speaker were, say 10m wide, you might be able to get a directional wavefront from it. Ultrasonics however have much smaller wavelength - about 8mm at 40kHz - so reasonably sized speakers will produce a directional wave front.
Second, ultrasonic sound waves will demodulate in air. The resulting audible sound is much quieter than the ultrasound that generates it.
Joe Pompei called his speaker the Audio Spotlight® and founded Holosonics to produce it. There are a number of YouTube videos showing off the speaker: this one with Joe Pompei causing trouble in the library is my favorite, although this other one has some more technical details.
In March 2011, Elektor Magazine published an article by Kazunori Miura describing a directional speaker built from ultrasonic transducers. It was the inspiration for this project.
Briefly, Miura discovered that using pulse width modulation over a 40kHz square wave carrier produced a better result than several other schemes. He also seems to have pioneered using those 16mm transducers from ultrasonic range finders. The article has lots of useful hints about construction too, including the need to determine the polarity of the transducers (more on this later).
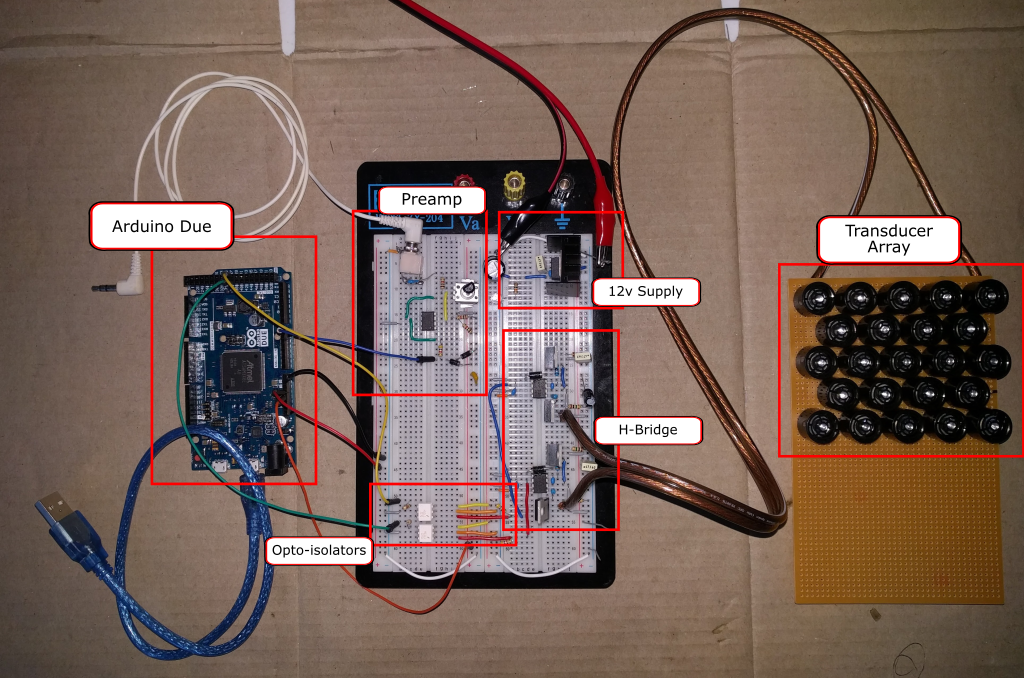
Miura's resulting device looks a lot like a class D amplifier (explanatory video here). The incoming signal modulates a 40kHz wave, which is then pumped through a MOSFET H-bridge to drive an array of ultrasonic transducers. If one were to replace the array of transducers with a low-pass filter and an audio speaker, it would look a lot like the the circuit used in the class D amplifier Wikipedia article.
As far as I can tell the differences between Pompei's and Miura's devices are:
Kazunori Miura is selling kits from his website. They're quite good value considering that they include the transducers, which are a little difficult to get hold of.
If you're into hobbyist electronics you should probably subscribe to Elektor. Every issue has two or three neat ideas that get me thinking. Look in the Jaycar Catalog, page 63 for a discount code.
SoundLazer is likely a device that Hackaday readers have heard of. The first SoundLazer device was a successfully funded Kickstarter project, with all backers receiving access to schematics and parts lists, however these are not available to non-backers and the company is now focused...
Read more »This all came about as a result of conversations with my son.
Mitchell is doing his Bachelor's degree in Music at the University of Western Sydney and this year will be putting on a performance as part of a course named "Sound and Performance: Expanded Practice". The university describes it in this way (bolding added by me):
This unit offers students the opportunity to plan, prepare and perform a substantial artistically and technically challenging performance project as featured artist. Students are required to expand their performance practice by utilising electroacoustic and/or multimedia and/or theatrical elements...
When he is assessed, Mitchell gets credit for his performance and any novel "elements" that he uses, but doesn't get credit for building these elements. In other words, it's not cheating if Dad builds it for him. It would even be fine for Mitchell to just go buy something off-the-shelf.
Mitchell had been interested in highly directional speakers for some time. I'm fascinated by them too: usually an audience has a shared experience of a performance, but directional speakers can give different parts of the audience different experiences.
After a bit of Googling though, I was hooked. I had a lot to learn, it wasn't going to be cheap, but it does seem to be something that I can accomplish.
That was October 2015.
Mitchell's performance is May 2016, but he should have a solid prototype before March in order to allow him to develop his performance.
Wish us luck.

Hi Alan,
I was wondering where you are getting your transducers from. I'm interested in getting a version of this project working in the museum I work at.
Hi Alan,
I'm the founder of Neverone. I'm very interested by your project and I want to know if I can have your email to purpose you a agreement to make a revolutionary clothes which an ultrasonic speaker technology in.
Sincerely,
Cédric LE GUERN
Hi Alan!
I'm writing to you asking for help. I'm a member of the physics-show from Aarhus, Denmark, and I have actually build your project myself for educational purposes. The thing is, that I'm not that familiar with programming, and I've never used Atmel Studio before, so when your project won't build in Atmel Studio, the brakes on my project is pretty much pulled. I get the following error when running your scr-code:
------ Build started: Project: GccBoardProject1, Configuration: Debug ARM ------
Build started.
Project "GccBoardProject1.cproj" (default targets):
Target "PreBuildEvent" skipped, due to false condition; ('$(PreBuildEvent)'!='') was evaluated as (''!='').
Target "CoreBuild" in file "C:\Program Files (x86)\Atmel\Studio\7.0\Vs\Compiler.targets" from project "C:\Users\VOLSOMMERE VOLSOM\Desktop\DirSpk1-master\DirSpk1-master\GccBoardProject1\GccBoardProject1.cproj" (target "Build" depends on it):
Using "RunCompilerTask" task from assembly "C:\Program Files (x86)\Atmel\Studio\7.0\Extensions\Application\AvrGCC.dll".
Task "RunCompilerTask"
Shell Utils Path C:\Program Files (x86)\Atmel\Studio\7.0\shellUtils
C:\Program Files (x86)\Atmel\Studio\7.0\shellUtils\make.exe all
make: *** No rule to make target `src/ASF/common/services/clock/sam3x/sysclk.o', needed by `GccBoardProject1.elf'. Stop.
Done executing task "RunCompilerTask" -- FAILED.
Done building target "CoreBuild" in project "GccBoardProject1.cproj" -- FAILED.
Done building project "GccBoardProject1.cproj" -- FAILED.
Build FAILED.
========== Build: 0 succeeded or up-to-date, 1 failed, 0 skipped ==========
I hope you have the time to help me! Thanks,
Mads Lykke Jensen
Physics-show, Aarhus
hey man,
i have been looking for some one to get a proper how to guide to make a parrabollic speaker everywhere its good to see you are taking this on.
im no longer interested as i am no looking into making a love bot lol
only joking :) i have just lost interest but i will follow your story.
 tshen2
tshen2

 Rue Mohr
Rue Mohr
 Slavko Glamocanin
Slavko Glamocanin
Hello Alan,
My name is Aiden, I'm currently a junior in Highschool. I really love this project, and I plan to replicate it, then improve upon the design in any way I can. I do have a few questions though, and I'm not sure if I should ask them here or in a PM. Thank you for documenting this project though, I find the tech fascinating.
Thanks
-Aiden