 frasanz
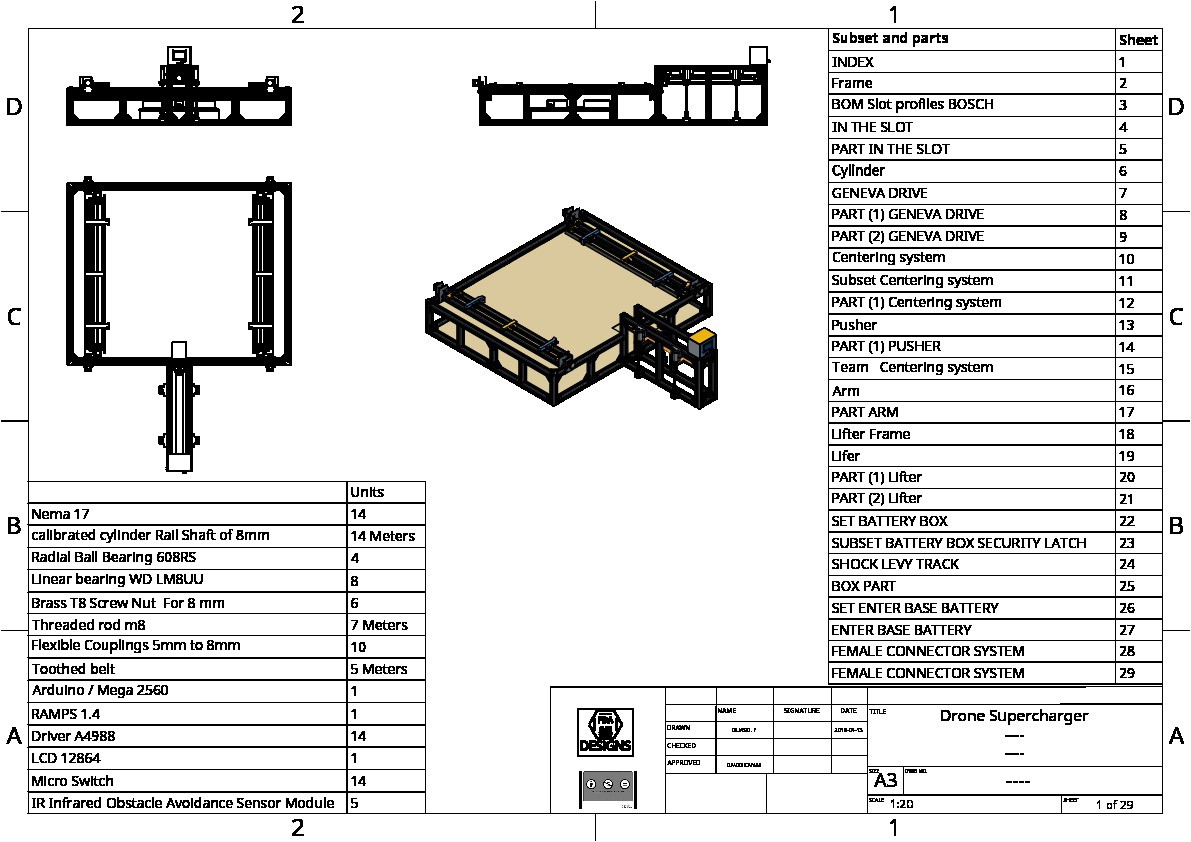
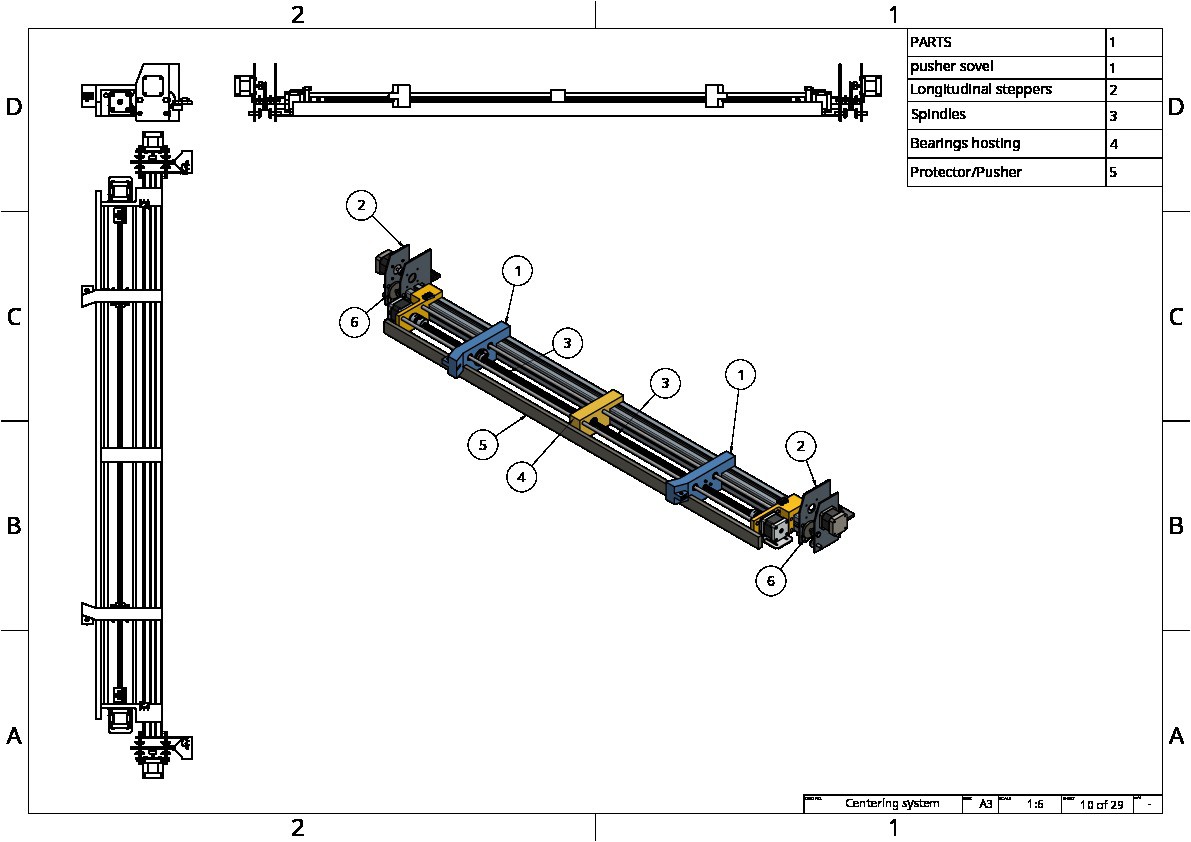
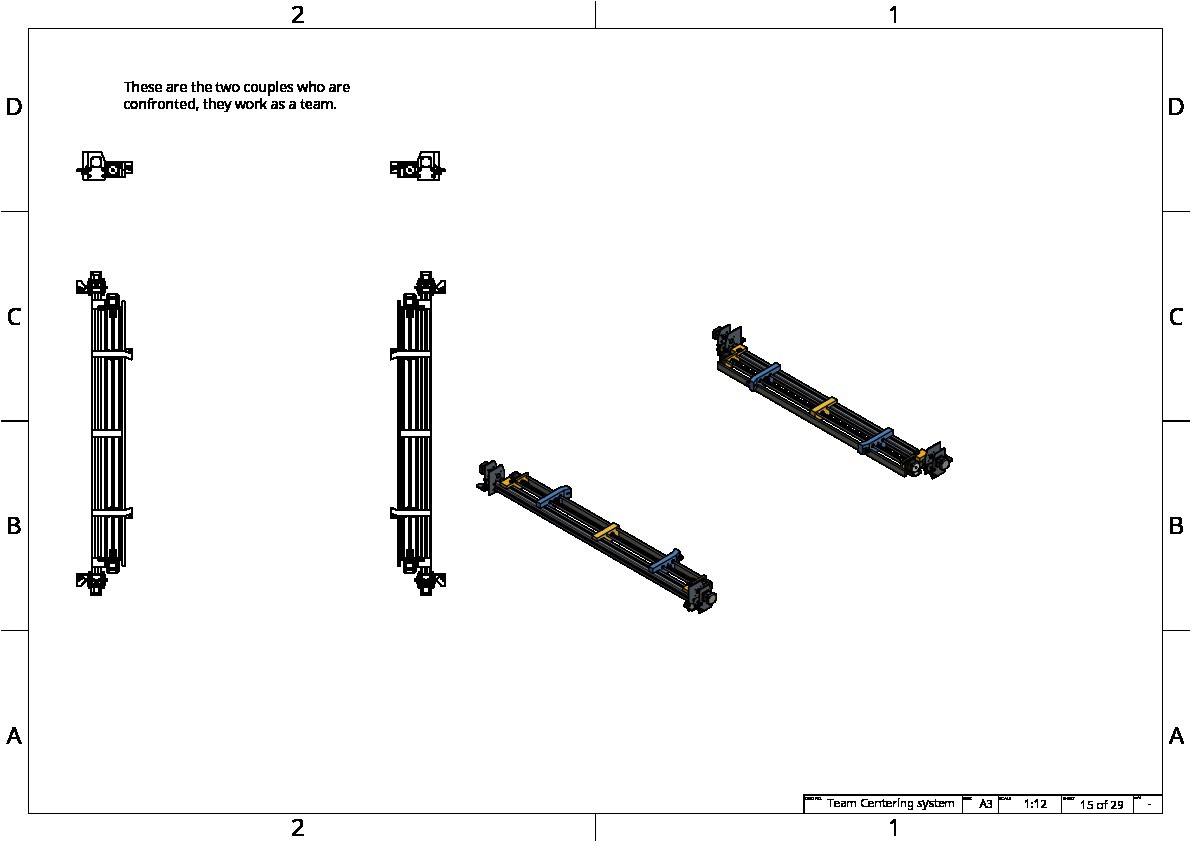
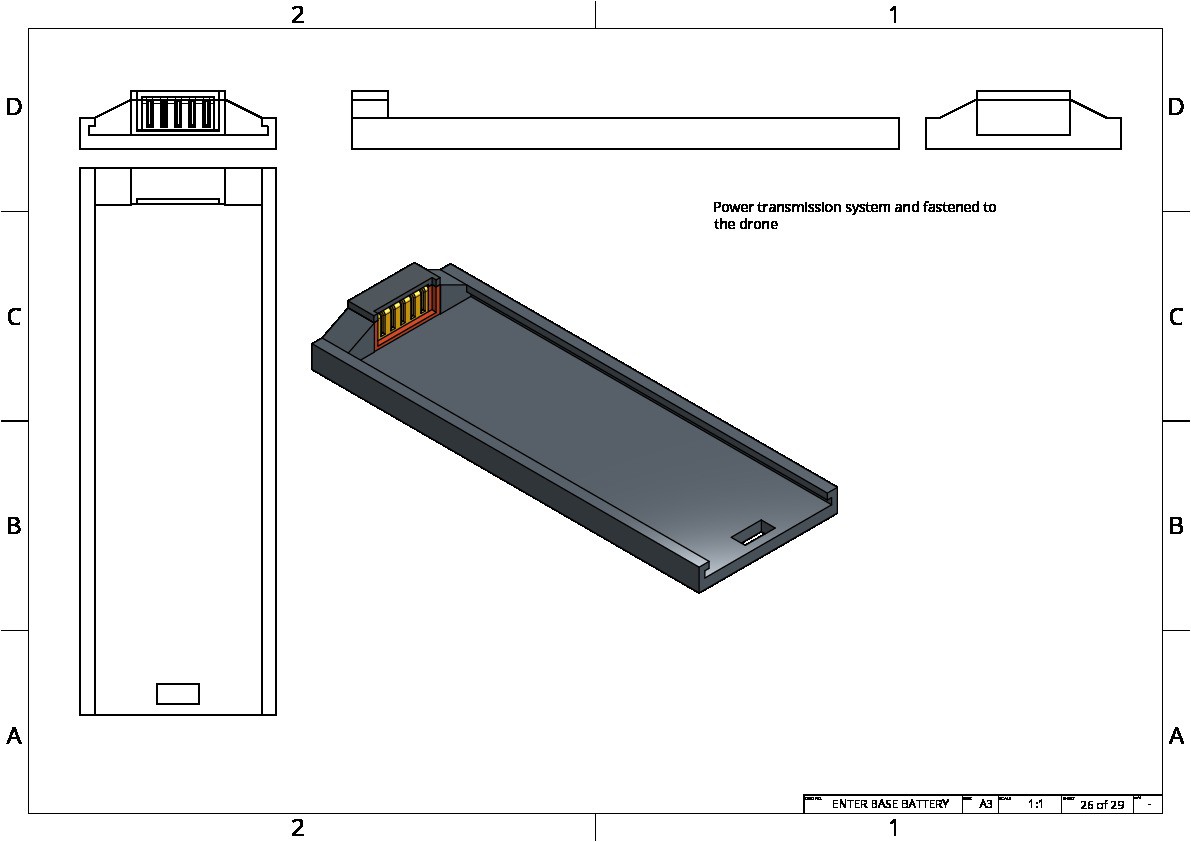
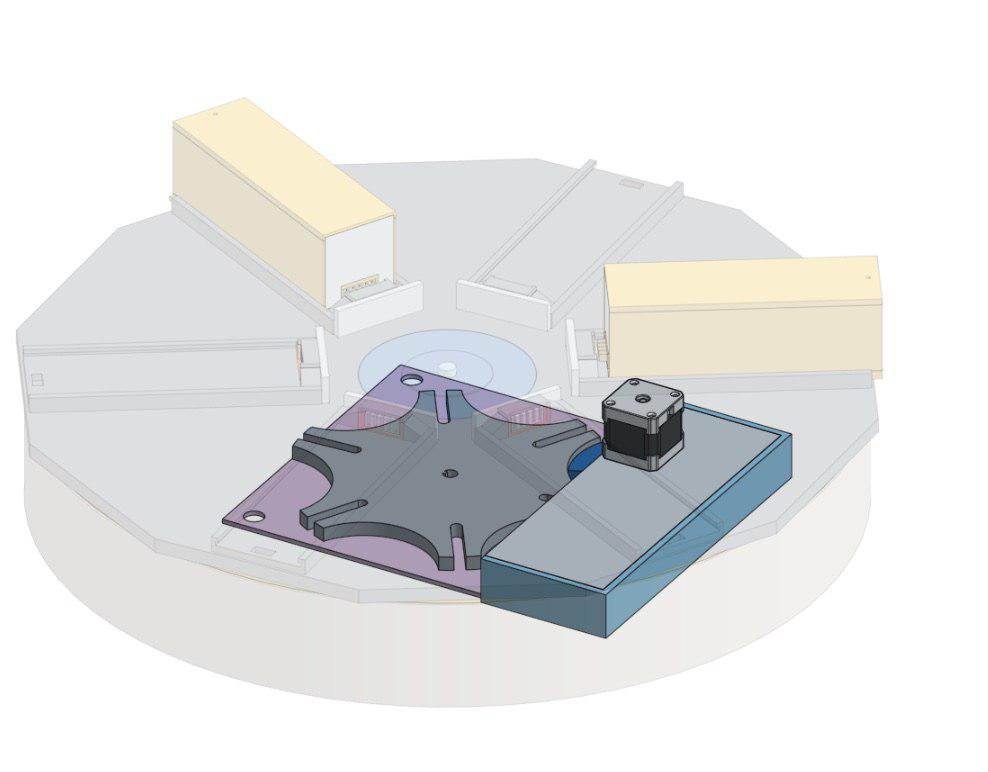
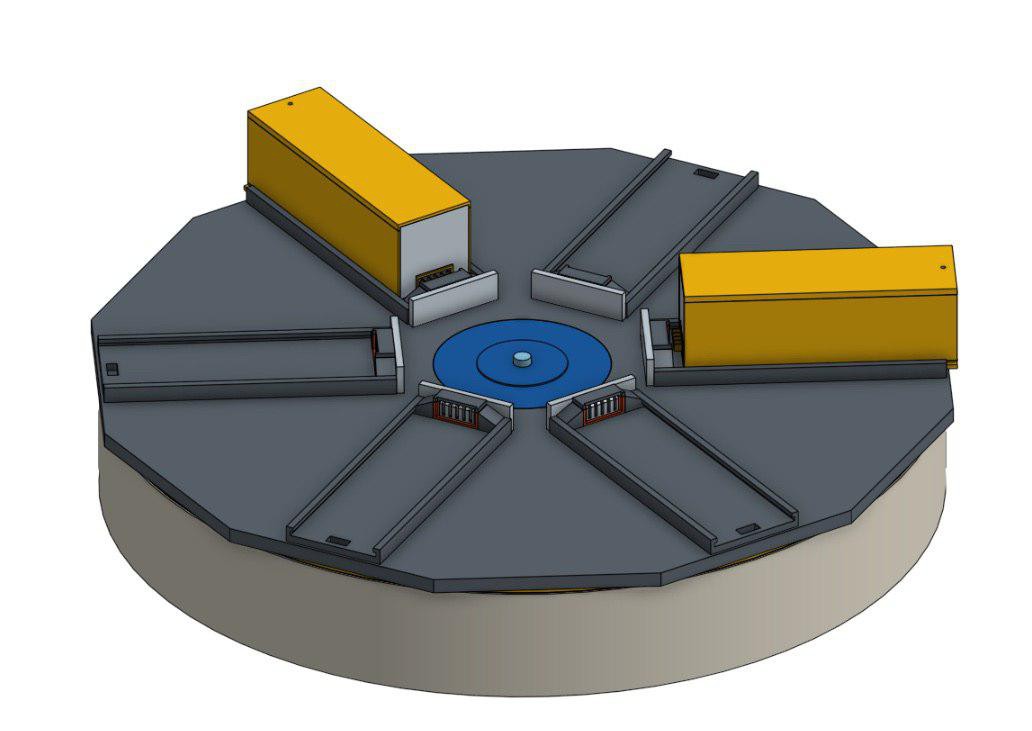
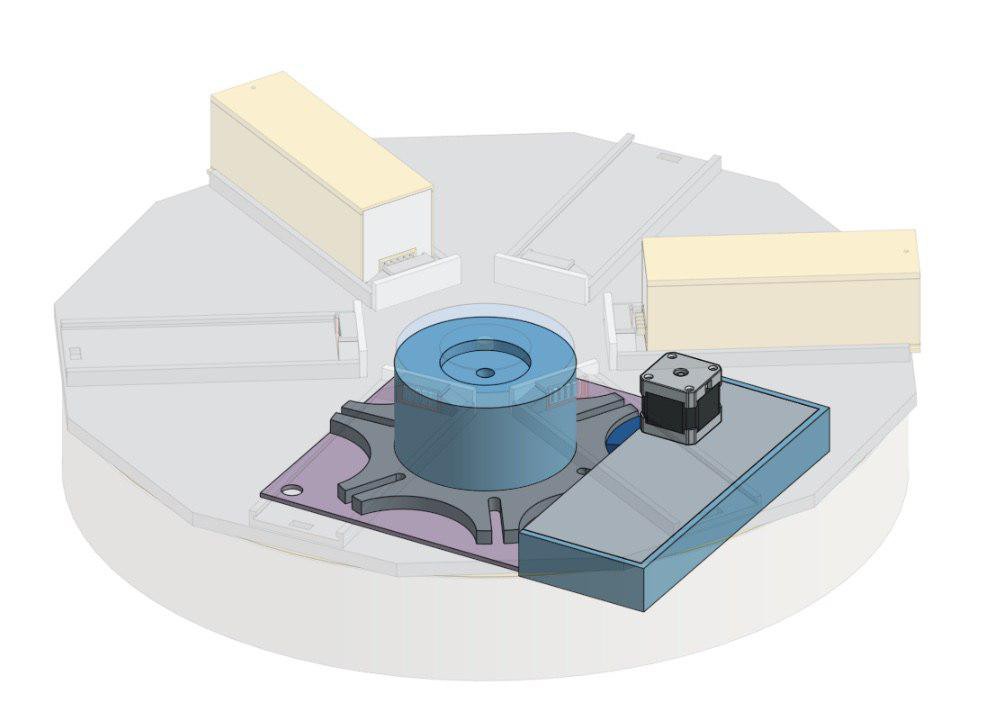
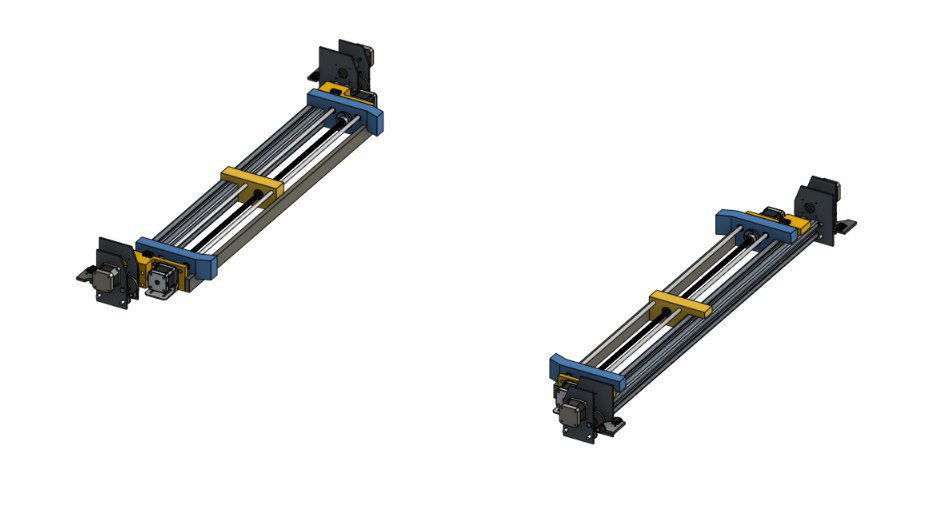
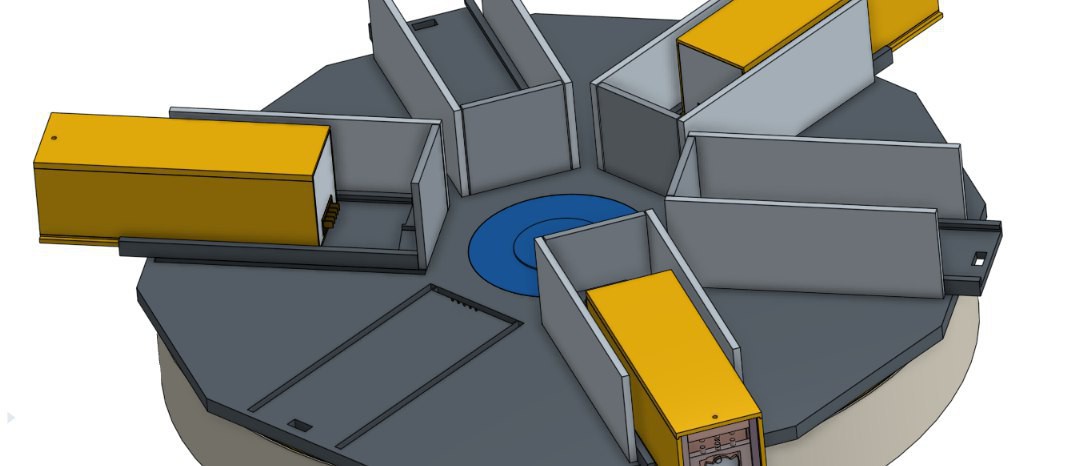
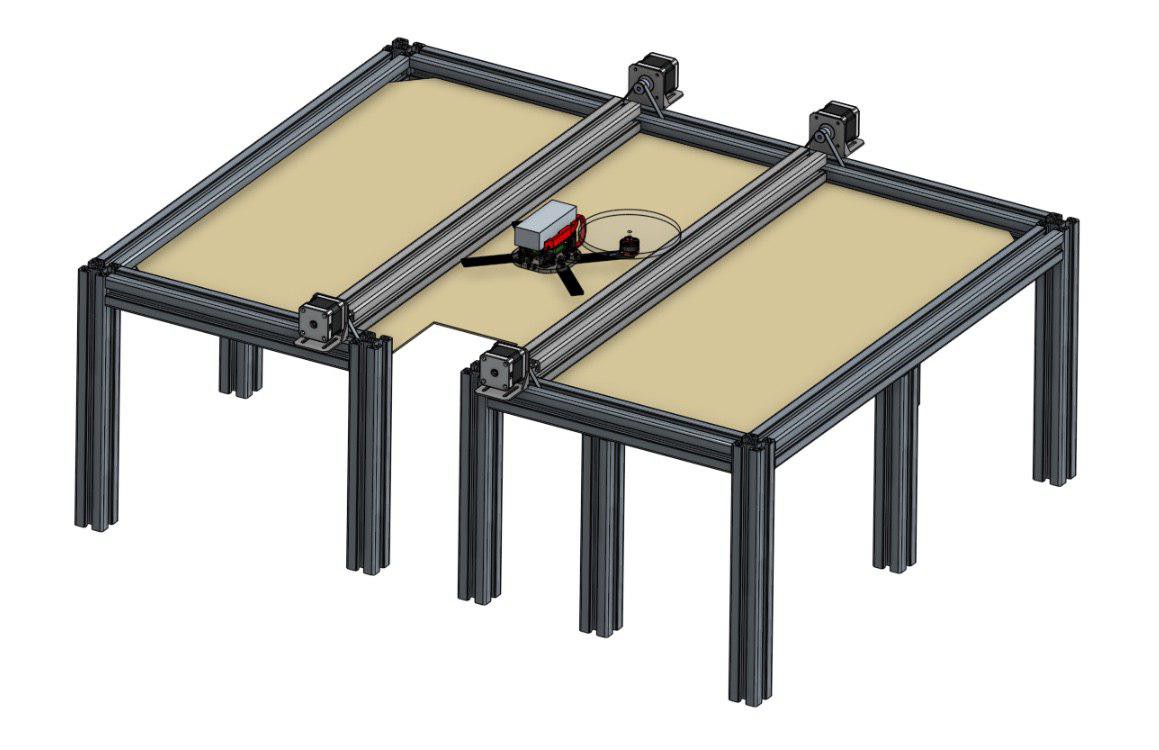
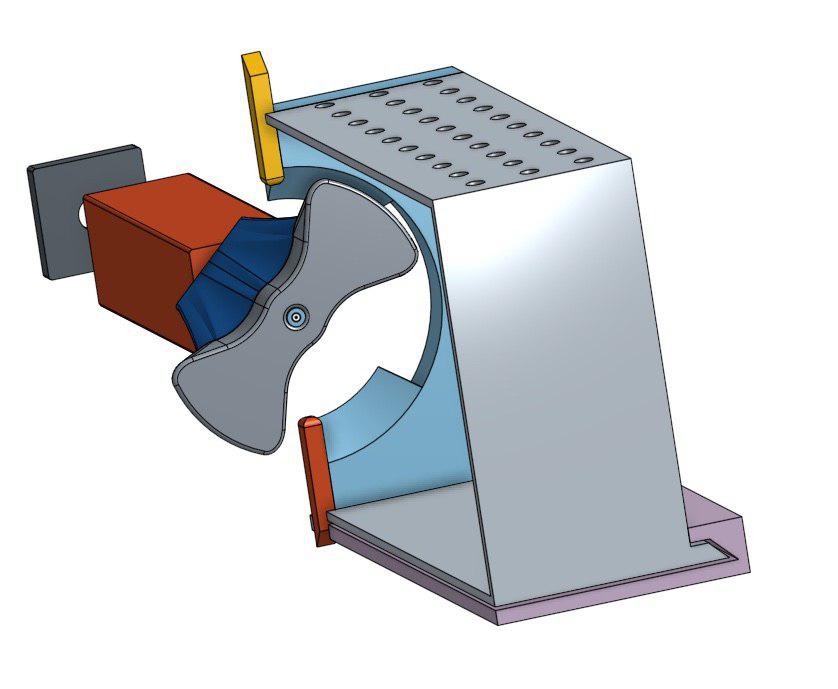
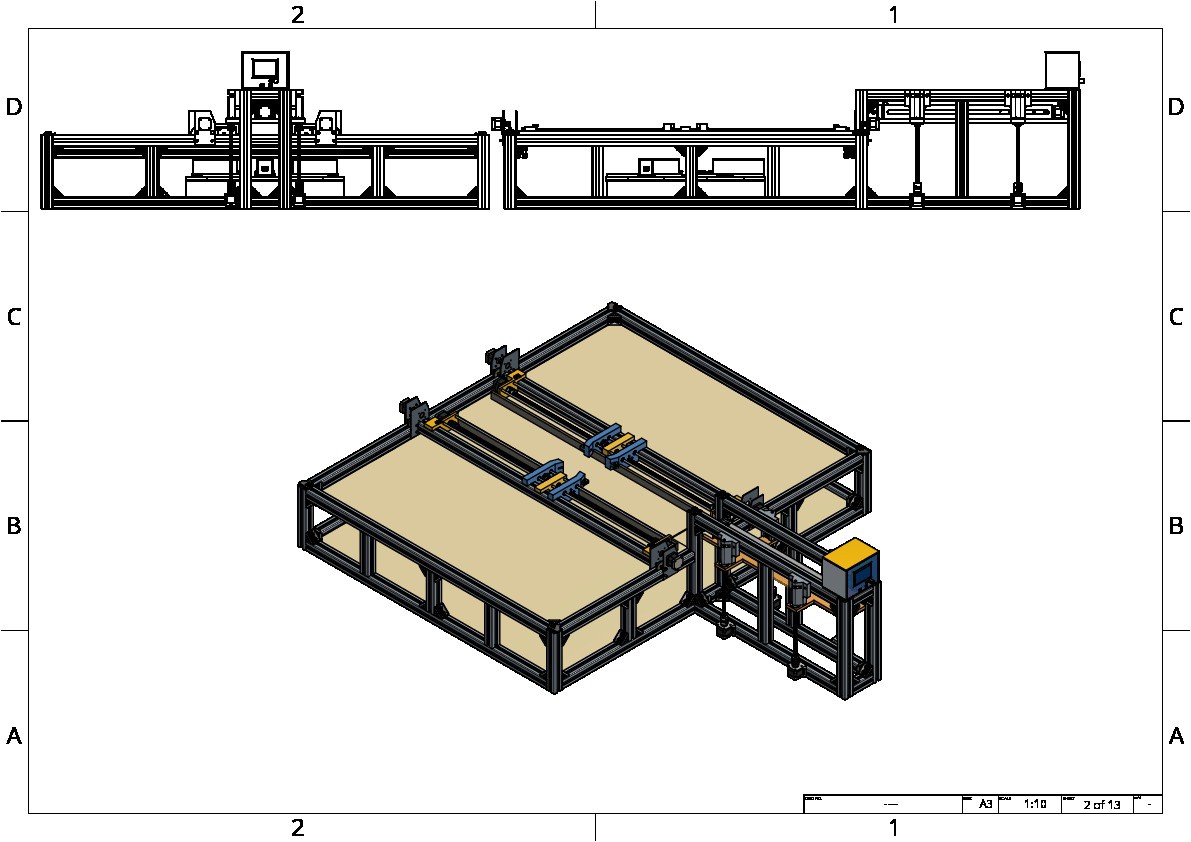
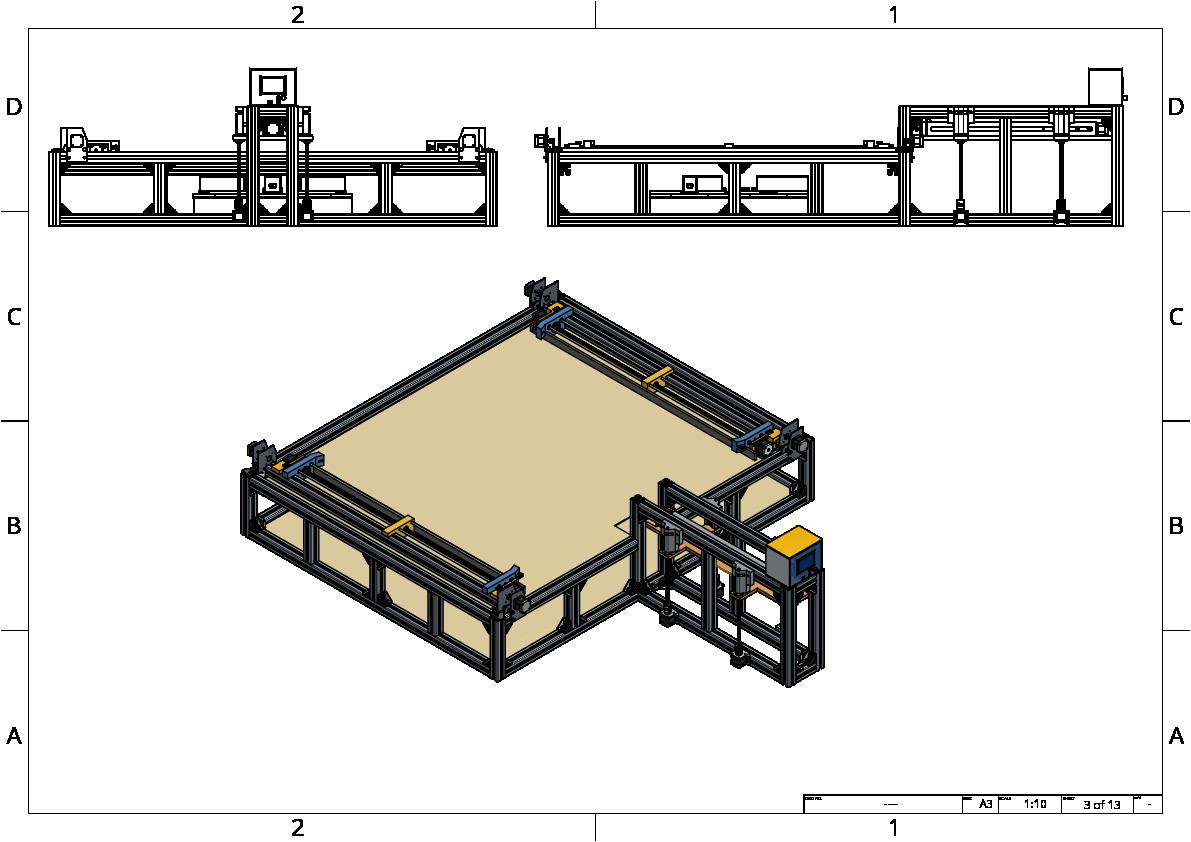
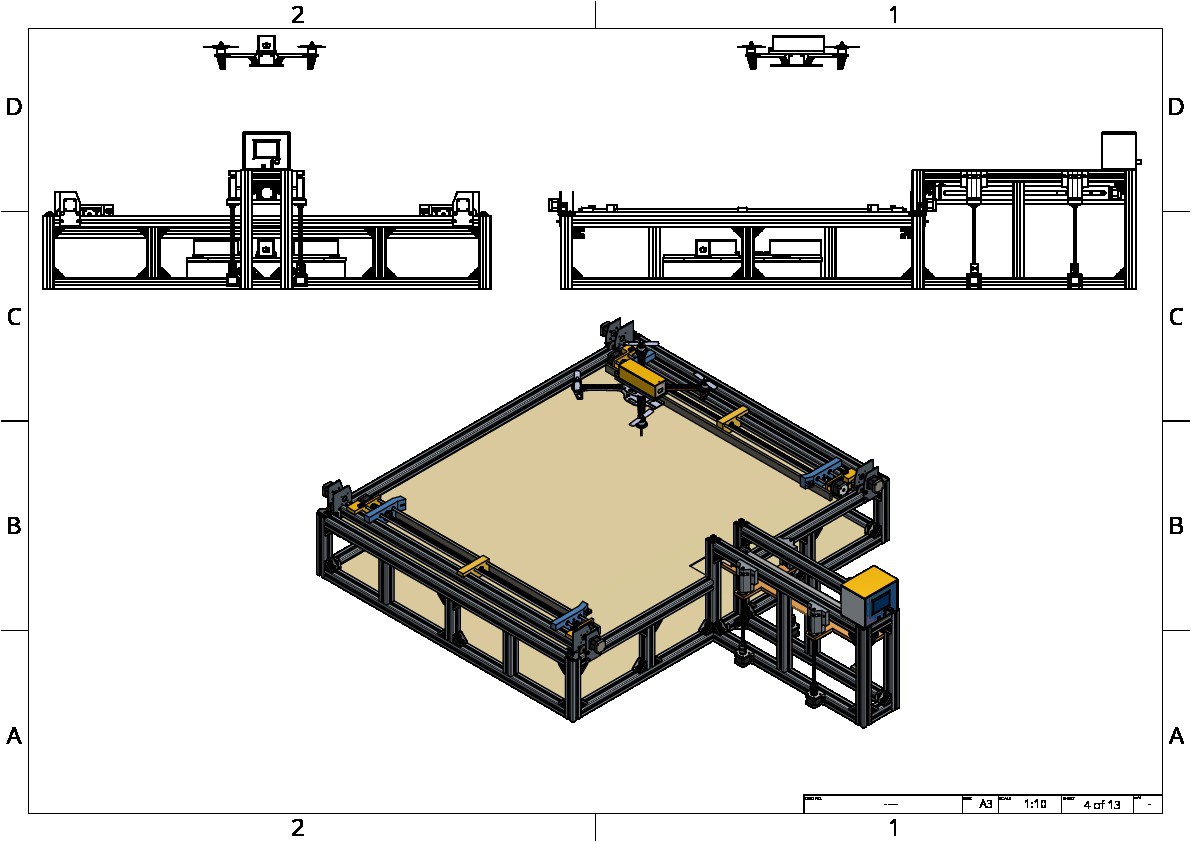
frasanzWe need a sturdy and robust system that serves as an automated platform for landing and replacing drone batteries. It has to work with different kinds of drones.
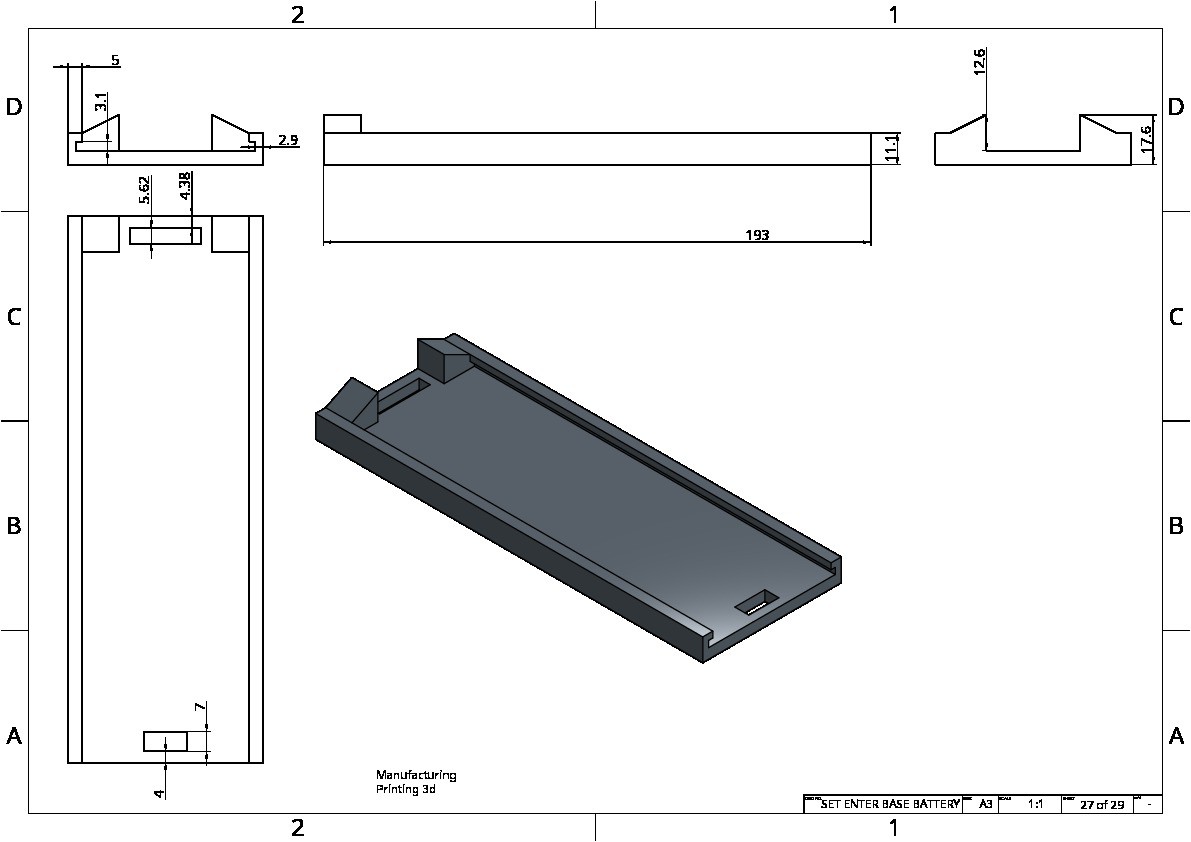
During the design we have thought of a platform that would serve for any type of drone, and that could be done by anyone.
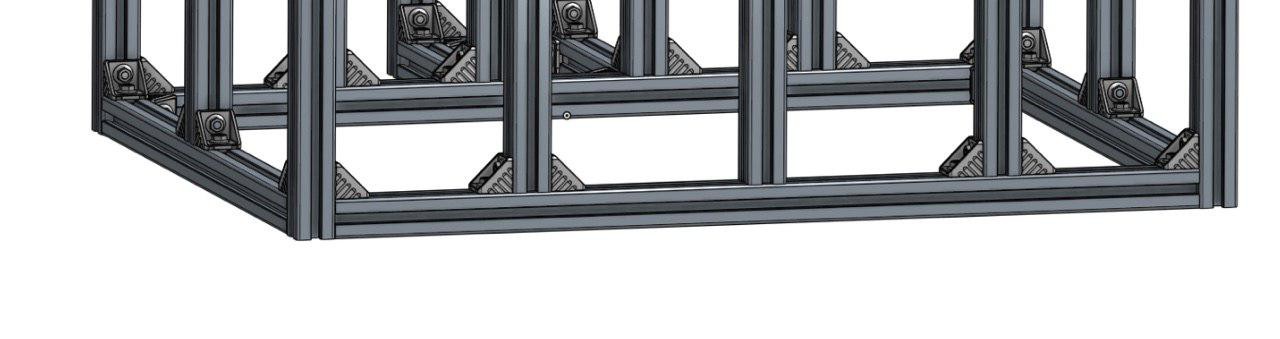
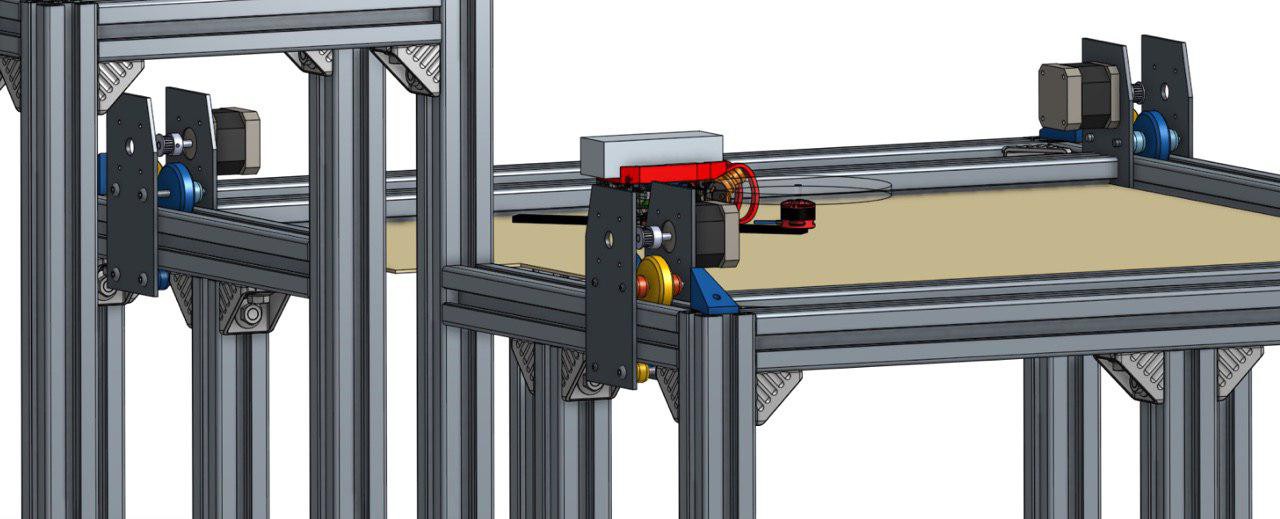
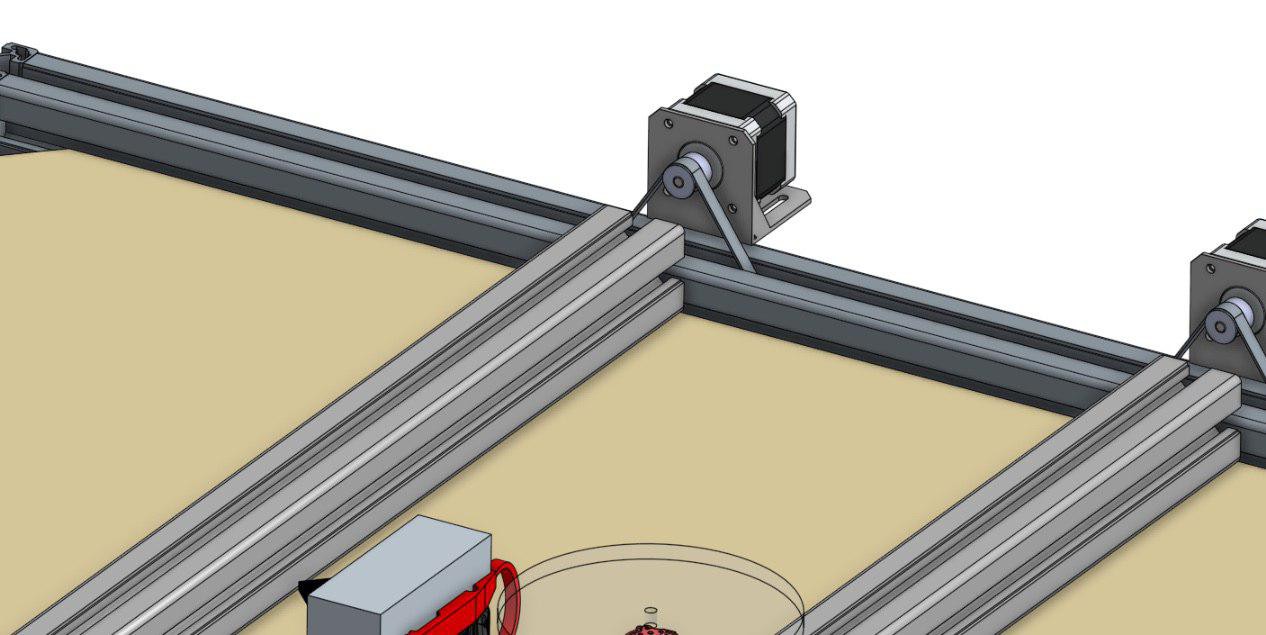
After this design phase, we want to manufacture the first prototype testing its actual operation.
If someone else is encouraged, let us know!











 xxxlzjxxx
xxxlzjxxx
 Lucas Rangit MAGASWERAN
Lucas Rangit MAGASWERAN
 Guis
Guis
 krkl
krkl
great idea!!!