David Sanchez Falero
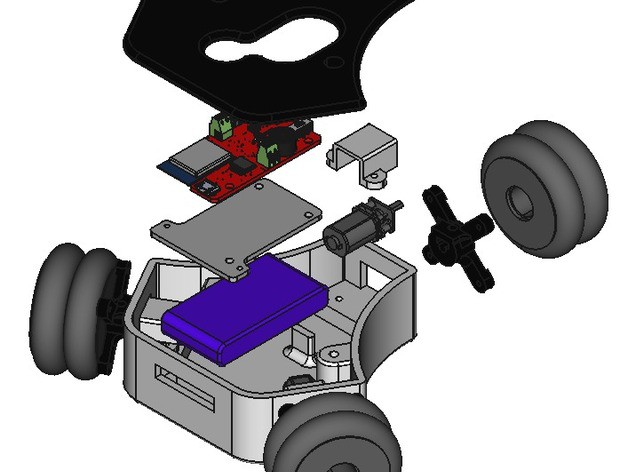
David Sanchez FaleroWe use platformio to upload the code to the board.
~/miniloki$ cd code/platformio/miniloki_omniboard
~/miniloki/code/platformio/miniloki_omniboard$ platformio runWe use Python to control miniloki with a joystick
~/miniloki$ cd code/python/
~/miniloki/code/python$ python client.py

 Dmitry Slepov
Dmitry Slepov
 agp.cooper
agp.cooper
 Shari
Shari